
电动客车智能化设计方案
2020-03-09 05:24李海玲高云龙刘兆梓
客车技术与研究 2020年1期
李海玲, 李 潇, 杨 赫, 高云龙,刘兆梓
(北京北方华德尼奥普兰客车股份有限公司, 北京 100072)
随着科学技术的发展和人们生活水平的提高,智能化设计已经融入到电动客车中。电动客车智能化设计是指电动客车通过搭载先进的车载传感器、控制器、执行器等装置,融合现代通信与网络技术,实现车与人、路等智能信息交换和共享,具备复杂环境感知、智能决策、协同控制等功能,最终实现安全、高效、舒适、节能行驶。智能化设计在电动客车上应用越来越广泛,使越来越多的电动客车向智能驾驶方向发展[1-2]。
1 电动客车智能化设计方案
1.1 车道偏离预警系统设计方案
车道偏离预警系统由智能摄像头和显示器组成,通过安装在车身上的摄像头采集车道线信息,集成车道线检测和预警算法到中央处理器中,将所需数据进行分析并存储,并对收集到的信息进行实时处理,从而分辨识别出道路的车道线,当车辆偏离车道线时,车道偏离预警系统通过警报的方式提醒驾驶人员及时修正车辆行驶方向,能够有效地避免事故的发生[3-4]。
车道偏离系统通过CAN总线与整车进行通讯。ID的标识符定义为0x18FEA117,将整车的相关信息,如车速、脚刹、手刹、左转信号及右转信号等发送给车道偏离系统。当车辆发生非正常车道偏离时,车道偏离系统将发出预警,并通过CAN总线将车道偏离预警信息发送至仪表,通过仪表显示出车道偏离信息,如图1所示。

图1 车道偏离预警系统连接示意图
1.2 超声波雷达与摄像头融合的可视系统设计方案
该融合系统通过超声波雷达探测车身与周围障碍物之间的距离和角度,然后再与摄像头采集的车辆周围影像进行数据融合处理,最终显示在中控屏上[5-6]。该融合系统弥补了单一传感器在障碍物检测中的不足。
该系统由4个鱼眼广角高清摄像头、12个超声波雷达、控制器及显示屏组成。将虚拟的车身、周边障碍物与合成的实景图像相结合,可以呈现动态前视、后视、左视、右视、俯视视图以及显示车辆前、后、侧全方位的全景影像,从而确保行驶安全。系统布置图如图2所示。

图2 摄像头及雷达布置图
该系统工作原理是:通过对超声波雷达和摄像头进行联合标定,将采集到的信息在控制器中进行分析处理,并通过外部接口与电动客车进行CAN总线通信,将数据与整车信息融合,实时地显示在显示屏上,如图3所示。此外,全景环视系统还具有视频存储功能,车辆在发生碰撞时,可以将录像导出并锁定。

图3 融合可视效果图
1.3 疲劳驾驶预警系统
疲劳驾驶是造成交通事故的重要因素,为了能够快速、有效地检测驾驶员疲劳状态,疲劳驾驶预警系统应势而生。
疲劳驾驶预警系统是一款采用人脸检测,结合眼睑闭合算法,并且在人脸区域拟合关键点,识别各种危险动作和疲劳姿态并进行报警的驾驶安全主动监控系统[7-8]。该系统安装在驾驶员正前方偏右30°位置,设备上仰,距离驾驶员前方80 cm左右,利用摄像头对驾驶员的头部、面部及眼部动作等进行实时检测,通过图像识别分析方法,定时扫描分析驾驶员精神状态,并对各种危险驾驶行为以及疲劳驾驶给出警告,减少由于疲劳驾驶导致的交通事故。并可通过无线通讯将图像传输至云管理平台实现远程监管和风险评估,连接示意图如图4所示。

图4 疲劳驾驶预警系统连接示意图
该系统自标定过程:车辆启动且车速超过30 km/h后,系统进入45 s的自标定。该过程会针对驾驶员的个体特征及驾驶员姿态标定系统核心参数,需要特别注意的是在该过程中应该保持正常的驾驶状态,切记不要模拟疲劳瞌睡的行为。标定完成后设备会发出“滴滴~”提示音,提示系统可以正常触发姿态报警。
车辆正常行驶之后,疲劳驾驶预警系统可以将驾驶员实时行为以3 min为单位进行高清存储,并可以通过GPS和4G通信实现报警信息、报警视频及其他相关数据的实时传输,与监控管理平台进行交互,便于进行监督和管理。
该系统也可以通过CAN总线与电动客车进行数据交换及通信,通信协议分2个ID发送。
1)一个ID的标识符定义为0x18FEA617,发送方为疲劳驾驶预警系统,接收方为整车控制器。当驾驶员出现分神、遮挡、抽烟、打电话及打哈欠等行为时,疲劳驾驶预警系统把检测到的行为发送给整车控制器,整车控制器判断是否向驾驶员进行安全提示。
2)另一个ID标识符定义为0x18FEA217,发送方为整车控制器,接收方为疲劳驾驶预警系统,涉及的主要参数为车速,因此整车控制器只需将实时车速发送给疲劳驾驶预警系统即可。
1.4 电子后视镜系统
电子后视镜系统可实时显示车辆左右及前部动态盲区的监测影像。它比传统光学后视镜具有更清晰的影像和更宽的视野,雨天看得清,夜晚看得见,能够有效减少因视野盲区导致的安全驾驶事故。
本文电子后视镜系统由2个显示主机、2个长焦夜视防眩光摄像头和2个短焦夜视防眩光摄像头组成。该系统的重点是各个部件的安装位置,安装位置校准之后能够达到全方位盲区辅助,也可以解决车辆低速静态、高速动态盲区监控。
显示主机固定在A柱车内两侧,其底部分别与左、右外视镜底部对齐,如图5所示(由前向后看)。
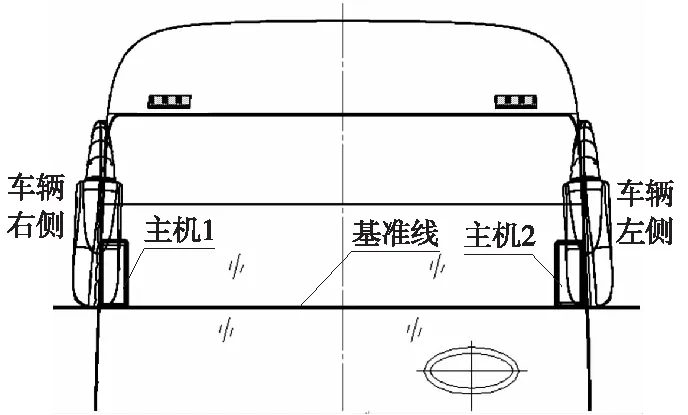
图5 显示主机位置示意图
2个长焦摄像头分别固定在车外两侧车头流水槽上方,与水槽平齐,视野向车辆后方,偏后30°,左右安装位置对称,如图6(a)所示。2个近焦摄像头,装在左、右侧A柱上,视野向下,垂直于地面安装;安装高度尽可能向上,以便获取更好的视野,左右安装位置对称,如图6(b)所示。
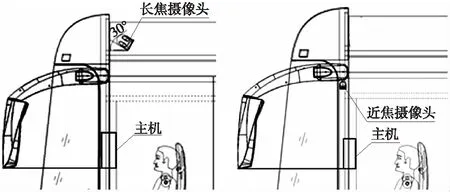
(a)长焦摄像头安装位置 (b)近焦摄像头安装位置
安装完成后将系统稍微调试即可,最终效果如图7所示。另外,该系统也可以通过存储卡进行视频储存,可以随时调取之前所监控的画面。

图7 电子后视镜系统效果图
2 结束语
电动客车智能化不仅提升了驾驶的舒适性和高效性,而且满足了个性化需求。随着汽车保有量的增多,交通事故频发,提高汽车的主动安全,发展智能驾驶汽车,是未来汽车产业的趋势[9-10]。在不久的将来,智能驾驶将促进人类向更具创造性的方向发展。
猜你喜欢
财会学习(2022年7期)2022-11-13
中国交通信息化(2022年7期)2022-10-27
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
医学食疗与健康(2021年27期)2021-05-13
