
基于Huber M-CKF的UUV目标跟踪算法
2020-03-06 09:52:50范世东
水下无人系统学报 2020年1期
王 斌, 温 泉, 范世东
基于Huber M-CKF的UUV目标跟踪算法
王 斌1, 温 泉2, 范世东1
(1. 武汉理工大学能源与动力工程学院, 湖北 武汉, 430063; 2. 长江航道规划设计研究院, 湖北 武汉, 430010)
针对无人水下航行器(UUV)目标跟踪精度不高的问题, 文中将一种鲁棒性较强的M极大似然估计代价函数引入Huber-容积卡尔曼滤波(H-CKF)并应用于UUV的目标跟踪定位算法中, 通过改变归一化新息协方差的方法对CKF矩阵进行线性化求解。建立了UUV运动模型及观测模型, 在不同的非高斯噪声干扰下与转换测量卡尔曼滤波、CKF和扩展卡尔曼滤波3种滤波算法进行对比试验, 验证了HM-CKF的滤波精度和稳定性优于传统算法。
无人水下航行器; 卡尔曼滤波; M极大似然估计代价函数
0 前言
无人水下航行器(unmanned undersea vehicle, UUV)技术在军事领域、渔业以及海底探测等方面正在扮演着越来越重要的角色[1]。目前UUV的目标跟踪主要通过检测目标的有效辐射(例如声辐射和电磁辐射), 以获取目标相对于UUV的连续方位角[2]。但是在水下恶劣情况下被动声呐的测量精度很低, 且海洋情况(海水温度、密度和盐度变化等)复杂, 噪声统计特性(平均值和协方差)未知, 估计的准确性未知。同时, 非线性的测量量存在于UUV的目标跟踪中, 给滤波算法带来了极大的困难, 因此精算滤波算法对于UUV的目标跟踪来说具有极大的工程意义[3-5]。
目前UUV的目标跟踪方法主要有粒子滤波(particle filter, PF)、扩展卡尔曼滤波(extended Ka- lman filter, EKF)、无迹卡尔曼滤波(unscented Kal- man filter, UKF)及容积卡尔曼滤波(cubature Kal- man fllter, CKF)等。PF依据蒙特卡洛仿真思想, 通过随机产生大量粒子来近似后验概率密度。因此粒子滤波计算量相当大, 对于实时性的要求很难满足, 且有粒子退化和贫化等问题[6]。边信黔等[7]将EKF算法应用到UUV的航迹推算上, 取得较好效果, 但EKF对高非线性系统的预测准确性较差, 而且需要计算雅可比矩阵, 导致计算系统复杂, 应用性不强[8]。许多学者也提出了基于UKF的状态估计算法, 该算法的性能优于EKF, 且无需计算雅克比矩阵, 但UKF使用权值为负的Sigma点来更新矩阵, 在高维系统中准确度低, 计算复杂在工程中难以实现[9]。Arasaratnam等[10]提出了基于容积变换的CKF方法, 其具有编号稳定, 计算复杂度低, 操作简单等优点, 但是也不能很好地解决非高斯白噪声问题。
为此, 文中利用具有鲁棒性的M极大似然估计函数[11]来改造Huber-CKF(H-CKF), 先通过重建CKF的测量信息, 对非线性测量信息进行滤波, 再利用高阶容积准则对该滤波框架进行近似计算, 进而得到量测噪声下的Huber M-CKF(HM-CKF)算法。这样就无须使用传统的算法来避免噪声对信息的干扰, 从而实现了滤波算法的鲁棒性。在不同的非高斯噪声干扰下与CKF、EKF、转换测量卡尔曼滤波(converted measurement Kalman fil- ter, CMKF)进行了仿真对比试验, 验证了HM- CKF的滤波精度和稳定性更优于传统算法。
1 UUV运动模型建立
1.1 运动方程
为了模拟UUV在水下的运动, 首先需要对目标的运动规律进行建模, 假设目标在三维空间内以匀速直线运动, 则在离散时间系统下+1时刻目标运动方程可以表示为

在实际运行过程中, 目标不可避免地会受到环境因素的影响, 速度会发生小范围的波动, 不可能做严格的匀速直线运动, 这些影响因素可以视为过程噪声来进行建模, 所以加入过程噪声将运动方程修正为
目标速度可表示为

将运动方程用矩阵的形式表示为


1.2 量测方程

应用泰勒展开式, 并忽略高阶项, 不难得到

式中,=[3,3], 为测量转换矩阵。
在理想状态没有系统偏差的条件下

在有系统偏差条件下


以上数学模型可计算出模拟声呐收集的信号数据。
2 算法描述
2.1 EKF
EKF原理和经典卡尔曼滤波的原理基本一致, 都是以线性最小方差估计理论为基本出发点, 通过递推算法, 从已有的测量信号中估算选取有用信号, 并利用前一时刻的估计值和当下时间的测量值来改变对变量的估算, 得到当下时刻的状态值。与经典卡尔曼滤波不同的是, EKF算法把非线性函数在最优估计点附近进行了1阶或2阶泰勒展开, 有选择地丢弃了高阶项, 从而把非线性模型简单线性化[7]。非线性系统可由状态方程式(11)和量测方程式(12)表示。


2.2 CKF
构造条件性高斯模型如下


CKF算法流程表述如下[4]。
CKF时间更新为




CKF量测更新为




2.3 HM-CKF


令

则有

构造Huber M估计的代价函数为[14]

最后对方差阵进行修正, 修正后的方差阵为
需要指出的是, 上式的推导没有改变CKF解的形式, 也没有对其进行线性化近似, 从而新算法保留了CKF非求导、精度高、稳定性好的优点, 同时也能有效抵抗异常噪声的干扰。
3 仿真结果与分析

初始方差为
定义位置均方根误差

仿真设定UUV模型为深海“海狮”号UUV, 携带高度计、/倾角传感器和前视声呐[15], 其主要性能指标如表1所示。

表1 仿真模型参数
3.1 轨迹图对比
式(1)~式(5)模拟产生UUV的真实轨迹, 所得数据称之为真值, 由于此模型中所假设UUV在方向上速度为0, 在-平面上做匀速直线运动; 但是实际应用中的声呐无法直接得到真实值, 只能得到测量值, 也就是文中数学模型中添加的噪声测量值, 由于噪声误差的存在, 声呐得到的数据可能与真实值差别很大, 其中真实轨迹和测量轨迹如图1所示, 图中, 横、纵坐标分别为大地坐标系的和方向。

图1 无人水下航行器仿真航迹
3.2 误差对比
1) 线性系统
文中在、、这3个方向进行了仿真试验, 得到线性系统下误差对比如图2所示。
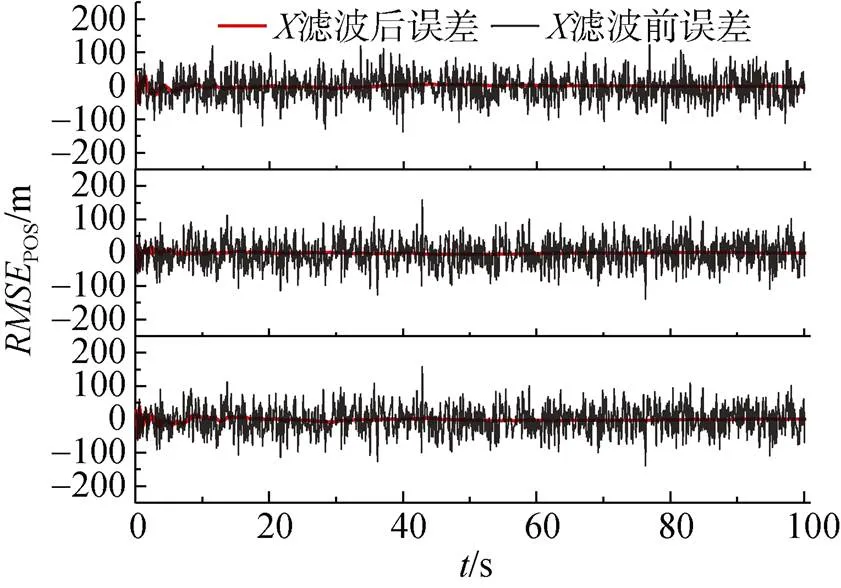
图2 各方向滤波前后误差比较
由图2可知, 滤波前的误差值(黑色曲线)在0值上下波动很大, 但经过滤波后的误差值(红色曲线)在15 s过后非常稳定, 保持在0值附近, 即在线性系统内经过卡尔曼滤波后误差显著减小。
2) 非线性系统
在高非线性系统中, 文中为突显各种滤波算法的优劣, 在3种典型的声呐工况下将4种滤波方法进行对比, 每组进行50次蒙特卡洛仿真试验。状态方程过程噪声协方差和转换测量噪声的标准差取值如表2所示[4]。

表2 3种工况下状态方程过程噪声协方差和标准差
图3~图8分别给出了UUV直航情况下各滤波算法pos对比图。
由上图可知, 在高非线性系统内CMKF已经发散, 位置误差值偏大, 在工程应用上表现不佳。相比较于CMKF, EKF和CKF收敛速度明显加快, 数值也比较稳定, 在低噪声条件下平均位置误差值稳定在50 m内, 在高噪声条件下平均位置误差值稳定在1 000 m以内, 工程上表现良好; 但EKF和CKF还是存在很大不足, 2种滤波算法在高噪声条件下的平均位置误差超过500 m, 无法再减小, 性能不如HM-CKF。

图3 工况1下各滤波算法位置均方根误差(RMSEpos)对比曲线
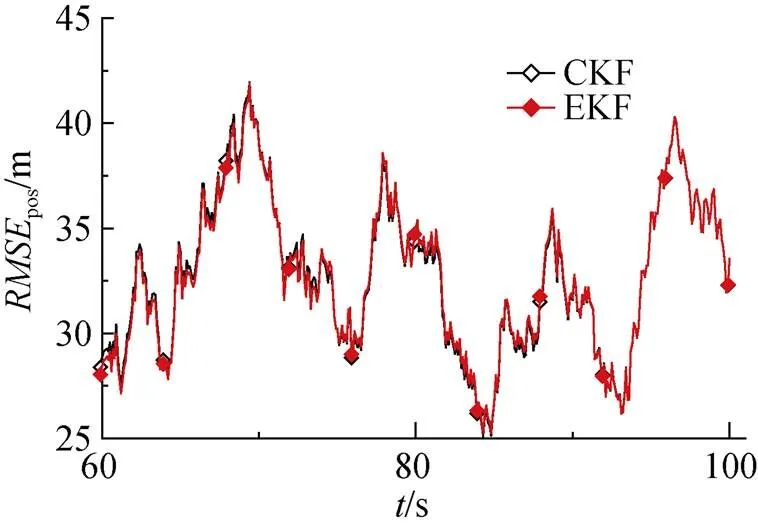
图4 工况1下容积卡尔曼滤波和扩展卡尔曼滤波的RMSEpos放大曲线
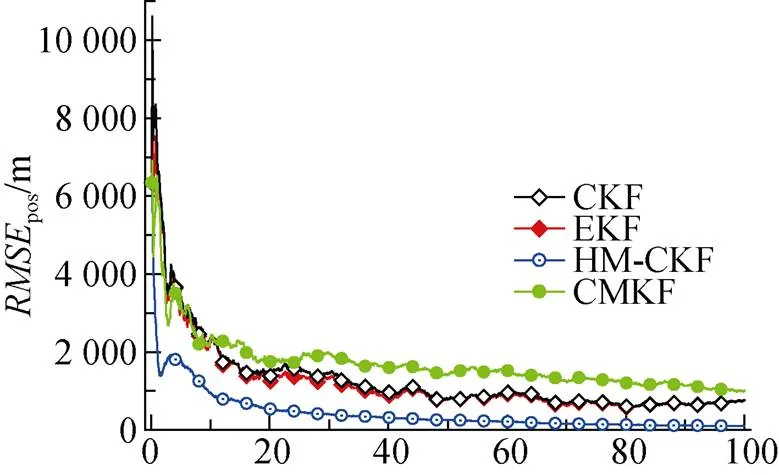
图5 工况2下各滤波算法RMSEpos对比曲线
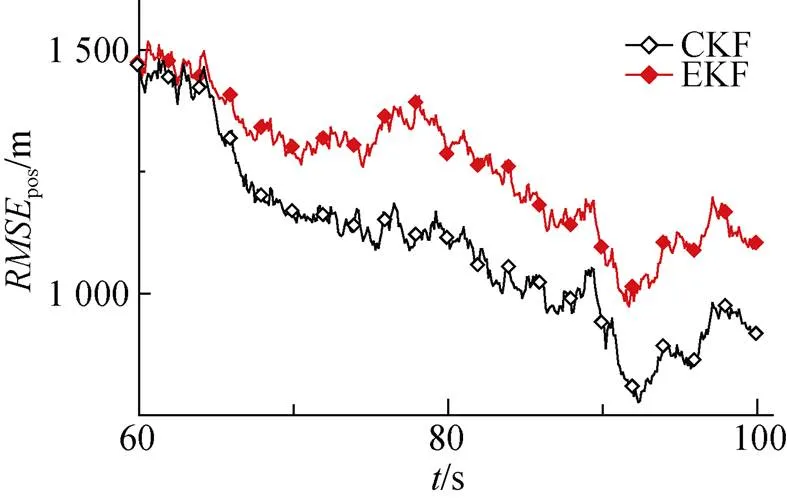
图6 工况2下CKF和EKF的RMSEpos放大曲线
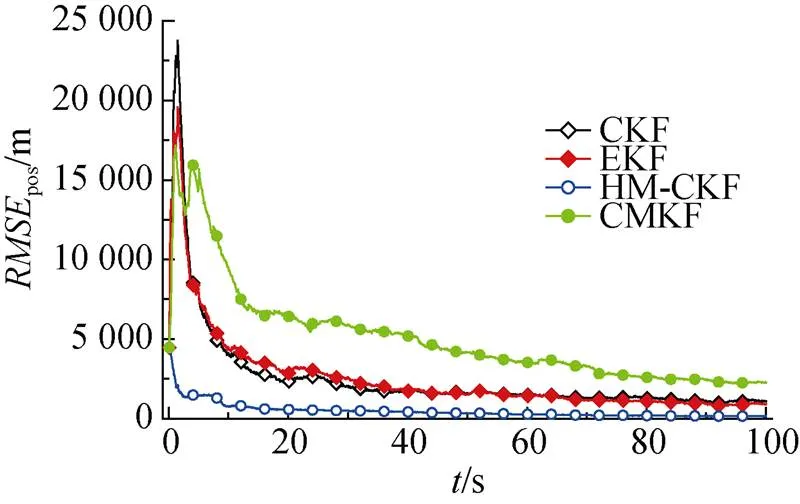
图7 工况3下各滤波算法RMSEpos对比曲线

图8 工况3下CKF和EKF的RMSEpos放大曲线
从收敛速度方面分析, HM-CKF从20 s左右已经开始收敛, EKF和CKF则从30 s左右才开始收敛, 前者收敛速度明显更快; 从平均位置误差值方面分析, HM-CKF最后收敛的误差值明显小于EKF和CKF的收敛误差值。
通过前面理论分析和仿真案列, 可得到如下结论:
1) 卡尔曼滤波在处理线性系统误差方面性能优异, 但在非线性系统内性能不佳;
2) 在低噪声状况下, CKF无论在收敛速度或是位置误差值方面都优于EKF, 但在高噪声条件下二者性能差别不明显;
3) HM-CKF在水下目标的信号收集处理方面表现良好, 极大地减小了位置误差, 且比CKF和EKF收敛速度更快, 位置误差数值更小, 同时HM-CKF的数值稳定性和跟踪精度更高。
4 结束语
文中基于鲁棒性较强的Huber M极大似然估计代价函数, 针对H-CKF算法在复杂的非高斯噪声环境下估计精度不高的问题, 进行了求解优化和仿真验证。仿真结果显示, 在含复杂非高斯噪声的环境下, HM-CKF较CMKF、CKF和EKF,的数据曲线明显收敛更快、更稳定, 误差更小, 在非线性系统中其适用性更强。但在实际工程中, 有色噪声干扰往往比较大, HM-CKF虽比传统滤波算法表现得更为稳定, 但绝对精度却并不太高, 接下来的研究将着重优化HM-CKF算法的精度。
[1] 李永龙, 王皓冉, 张华. 水下机器人在水利水电工程检测中的应用现状及发展趋势[J]. 中国水利水电科学研究院学报, 2018, 16(6): 586-590.Li Yong-long, Wang Hao-ran, Zhang Hua.Application St- atus and Development Trend of Underwater Robot in Wat- er and Hydropower Engineering Detection[J]. Journal of China Institute of Water Resources and Hydropower Research, 2018, 16(6): 586-590.
[2] 庞硕, 纠海峰. 智能水下机器人研究进展[J]. 科技导报, 2015, 33(23): 66-71.Pang Shuo, Jiu Hai-feng. Current Statue of Autonomous Underwater Vehicles Research and Development[J]. Science & Technology Review, 2015, 33(23): 66-71.
[3] 张铁栋, 万磊, 王博, 等. 基于改进粒子滤波算法的水下目标跟踪[J]. 上海交通大学学报, 2012, 46(6): 943- 948.Zhang Tie-dong, Wan Lei, Wang Bo, et al. Underwater Object Tracking Based on Improved Particle Filter[J]. Jo- urnal of Shanghai Jiaotong University, 2012, 46(6): 943- 948.
[4] Xu J, Xu M, Zhou X. The Bearing Only Target Tracking of UUV Based on Cubature Kalman Filter with Noise Estimator[C]//2017 36th Chinese Control Conference(CCC). Dalian, China: IEEE, 2017: 5288-5293.
[5] 王艳艳, 刘开周, 封锡盛. 基于强跟踪平方根容积卡尔曼滤波的纯方位目标运动分析方法[J]. 计算机测量与控制, 2016, 24(11): 136-140.Wang Yan-yan, Liu Kai-zhou, Feng Xi-sheng. Bearings Only Target Motion Analysis Based on Strong Tracking Square-Root Cubature Kalman Filter[J]. Computer Measurement & Control, 2016, 24(11): 136-140.
[6] Kalman R E. A New Approach to Linear Filtering and Prediction Problems[J]. Journal of Basic Engineering, 1960, 82(1): 35-45.
[7] 边信黔, 周佳加, 严浙平, 等. 基于EKF的无人潜航器航位推算算法[J]. 华中科技大学学报: 自然科学版, 2011, 39(3): 100-104.Bian Xin-chan, Zhou Jia-jia, Yan Zhe-ping, et al. Dead Reckoning Method for Autonomous Underwater Vehicles Based on EKF[J]. Journal of Huazhong University of Scien- ce and Technology(Natural Science Edition), 2011, 39(3): 100-104.
[8] Leong P H, Arulampalam S, Lamahewa T A, et al. A Gaussian-sum Based Cubature Kalman Filter for Beari- ngs-only Tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1161-1176.
[9] Li P, Zhang T, Bo M. Unscented Kalman Filter for Visual Curve Tracking[J]. Image & Vision Computing, 2004, 22(2): 157-164.
[10] Arasaratnam I, Haykin S. Cubature Kalman Filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.
[11] 邓先瑞, 聂雪媛, 刘国平. WSNs下移动机器人HuberM- CKF离散滤波定位[J]. 计算机应用研究, 2016, 33(6): 1839-1842.Deng Xian-rui, Nie Xue-yuan, Liu Guo-ping. Discrete HuberM-CKF Filter Based Mobile Robot Positioning in WSNs[J]. Application Research of Computers, 2016, 33 (6): 1839-1842.
[12] Donoho D L, Montanari A. Variance Breakdown of Huber (M)-estimators:/→∈(1,∞)[J]. Annals of Statistics, 2015. arXiv:1503.02106vl.
[13] Li W, Swetits J J. The Linear L1 Estimator and the Huber m-estimator[J]. SIAM Journal on Optimization, 1998, 8 (2): 457-475.
[14] 刘星成, 袁东升, 梁平元, 等. 基于代价函数的WSN能R效路由协议性能分析[J]. 通信学报, 2011, 32(6): 132- 140.Liu Xing-cheng, Yuan Dong-sheng, Liang Ping-yuan, et al. Performance Analysis of Cost Function Based energy- efficient Routing Protocol in WSN[J]. Journal on Communications, 2011, 32(6): 132-140.
[15] 李晓兰. 我国引进深海水下机器人“海狮”号[J]. 海洋石油, 2009, 29(4): 103.
A Target Tracking Algorithm for UUV Based on Huber M-CKF
WANG Bin1, WEN Quan2, FAN Shi-dong1
(1. School of Energy and Power Engineering, Wuhan University of Technology, Wuhan 430063, China; 2. Changjiang Sea-route Planning Design Research Institute, Wuhan 430010, China)
To improve the target tracking accuracy for unmanned undersea vehicle(UUV), a robust M maximum likelihood estimation cost function is introduced into Huber-cubature Kalman filter(H-CKF) for UUV’s target tracking, and the CKF matrix is linearized by changing the normalized innovation covariance. UUV motion model and observation model are established to compare the Huber M-cubature Kalman filter(HM-CKF) with the converted measurement Kalman filter, the cubature Kalman filter and the extended Kalman filter(EKF) under different non-Gaussian noise interferences, and the results show higher filtering precision and stability of the HM-CKF than the traditonal algorithm in complicated undersea acoustic environment.
unmanned undersea vehicle(UUV); Kalman filter; M maximum likelihood estimation cost function
相关文章导航
1. 王维伟, 孙慧嵩, 颜宏璐. 一种移动FH-FSK通信多普勒估计方法[J]. 水下无人系统学报, 2019, 27(6).
2. 易镇辉, 俞建成, 毛华斌, 等. 一种水下滑翔机盐度数据的噪声处理方法[J]. 水下无人系统学报, 2019, 27(5).
3. 桑宏强, 于佩元, 孙秀军. 基于航向补偿的水下滑翔机路径跟踪控制方法[J]. 水下无人系统学报, 2019, 27(5).
4. 阮卫, 张秦南, 迪玉茹. 一种惯性测量组合陀螺常值漂移外场标定方法[J]. 水下无人系统学报, 2019, 27(4).
5. 熊露, 谌剑, 毕晓文, 等. 基于迭代观测更新滤波的单站无源定位算法[J]. 水下无人系统学报, 2019, 27(4).
6. 黄玉龙, 张勇刚, 赵玉新. 自主水下航行器导航方法综述[J]. 水下无人系统学报, 2019, 27(3).
7. 张思宇, 何心怡, 张驰, 等. 水下多目标跟踪技术现状与展望[J]. 水下无人系统学报, 2018, 26(6).
8. 孙宝全, 颜冰, 姜润翔, 等. 船舶静电场在船舶跟踪定位中的应用[J]. 水下无人系统学报, 2018, 26(1).
9. 赵俊波, 葛锡云, 冯雪磊, 等. 水下SINS/DVL组合导航技术综述[J]. 水下无人系统学报, 2018, 26(1).
10. 赵振轶, 李亚安, 陈晓, 等. 基于双观测站的水下机动目标被动跟踪[J]. 水下无人系统学报, 2018, 26(1).
U674.76; TN953
A
2096-3920(2020)01-0039-07
10.11993/j.issn.2096-3920.2020.01.006
王斌, 温泉, 范世东. 基于Huber M-CKF的UUV目标跟踪算法[J]. 水下无人系统学报, 2020, 28(1): 39-45.
2019-03-19;
2019-07-24.
中央高校基本科研业务费专项资助项目(195205013).
王 斌(1995-), 男, 在读硕士, 主要研究方向为多源信息融合技术.
(责任编辑: 杨力军)
猜你喜欢
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00
