
参数自适应教与学优化分数阶PID控制器设计
2020-03-05 09:42李飞闵昌万王颖夏强孙石杰张鹏宇
航空兵器 2020年1期
李飞 闵昌万 王颖 夏强 孙石杰 张鹏宇


摘 要:本文针对分数阶PID控制器调节参数多、人工调参难度较大的问题,提出了参数自适应教与学优化分数阶PID控制器设计方法。分数阶PID控制器参数寻优过程引入种群适应度方差表征种群的“聚集程度”,将影响算法收敛速度和收敛精度的教学因子设计成种群适应度方差的函数,使其在算法迭代过程中根据种群的“聚集程度”自适应调节算法收敛速度。当种群聚集程度高时,提高教学因子取小值的概率,增强种群的多样性;当种群聚集程度低时,提高教学因子取大值的概率,提高算法的收敛速度。通过仿真验证,本文提出的参数自适应分数阶PID控制器控制整数阶系统、分数阶系统均可获得优良的控制效果,与参考文献设计的控制器相比在动态性能上有显著提升,参数自适应分数阶PID控制器较整数阶PID控制器在响应速度上提高69.8%,超调量减少92.6%,稳态误差减小32.4%。
关键词:分数阶系统;PSATLBO算法;教学因子;参数自适应;分数阶PID控制器
中图分类号:TJ765;V37 文献标识码:A 文章编号:1673-5048(2020)01-0096-07
0 引言
随着科学技术的进步,以及计算机技术的飞速发展,分数阶微积分作为数学的一个重要分支在信号处理与系统辨识、控制和机器人领域取得了较大的进展[1-3]。分数阶系统(Fractional Order System,FOS)与整数阶系统(Integer Order System,IOS)相比包含更多的动力学信息,通常采用系统辨识的方法获得,例如固体加热模型[4]、加压重水反应堆模型[5]等。
分数阶PID(Fractional Order Proportional Integral Derivative,FOPID)控制器作为整数阶PID(Integer Order Proportional Integral Derivative,IOPID)控制器的扩展,设计自由度更大,更适合控制分数阶系统[6]。分数阶PID控制器设计参数为Kp,Ki,Kd,λ,μ,手动调参难度较大,许多学者对此进行了大量的研究工作。目前分数阶PID参数整定方法分三类:自整定、鲁棒整定、优化整定。Cao J Y,Machado J A T等人利用遗传算法对分数阶PID进行参数整定[7-8];Zamani M,Maiti D等利用粒子群优化算法对分数阶PID参数进行寻优[9-10];Dastjerdi A A等人分析了分数阶PID的频率特性,确定了分数阶PID的设计准则[11],并应用于三自由度位置控制模型;Sagar S,Bettayeb M等人设计了内模分数阶控制器[12-13];Bhase S S等人设计了分数阶PI控制器[14];Zhao C N,Monje C A,Chen Y Q,Padula F等人研究了不同优化目标和约束条件下的分数阶控制器[15-18],其他学者也对此做出了相关研究工作[19-21]。上述研究对利用教与学优化算法寻优分数阶PID控制器参数鲜有介绍,因此,本文提出利用参数自适应教与学优化算法对分数阶PID控制器参数优化。
1 分数阶微积分基础理论
1.1 分数阶微积分定义
分数阶微积分是整数阶微积分的延伸与推广,分数阶微积分将微积分的概念扩展到整个实轴,甚至是整个复平面。迄今为止,科学界尚未给出分数阶微积分的统一定义,目前常用的定义形式有Grunwald-Letnikov(G-L)定義以及Riemann-Liouville(R-L)定义。
通常将分数阶的微分和积分统一定义为分数阶微积分操作算子,操作算子形式如下:
1.2 分数阶PID控制器定义
分数阶PID控制器为整数阶PID控制器的拓展,其一般形式为PIλDμ,当λ=1,μ=0时为传统PI控制器;当λ=0,μ=1时为传统PD控制器;当λ=1,μ=1时为传统PID控制器。分数阶PID较整数阶PID控制器多了两个可调参数λ,μ,扩大了参数调节自由度,对于被控对象,尤其是分数阶被控对象,通过参数的合理配置能够获得更好的控制效果。分数阶PID控制器在频域内和时域内的控制形式如下:
2 PSATLBO参数优化
2.1 TLBO算法概述
TLBO算法由印度学者Rao在2014年提出,该算法与遗传算法、粒子群优化算法等传统优化方法相比,具有调节参数少、收敛速度快、求解精度高的优点[22-25]。将TLBO算法应用于分数阶PID控制器参数整定,可有效减轻调参工作量。
TLBO优化算法是模拟课堂教学过程,将这一过程用数学模型来表示。在整个班级中,教师与学生均为其中的个体,教师是个体中适应度最好的;而学生则是需要向老师学习的个体,学生中的每门课程代表待优化参数向量。算法中的班级可用搜索空间S表示,学生可用Xi表示,学生每门课程为分数阶PID的5个设计参数,其最大值、最小值分别用XUi,XLi表示。TLBO优化算法求解过程可分为两个阶段:一是学生向老师学习阶段,二是学生间互助启发学习阶段。
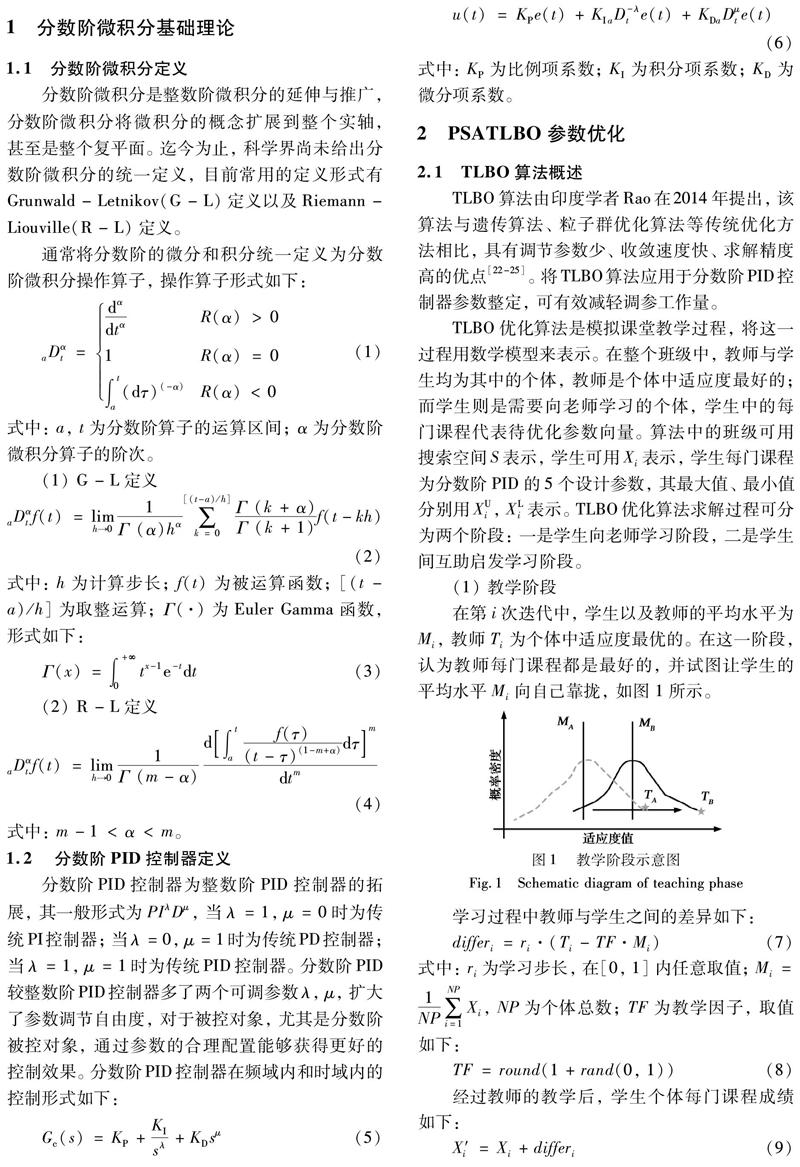
(1)教学阶段
在第i次迭代中,学生以及教师的平均水平为Mi,教师Ti为个体中适应度最优的。在这一阶段,认为教师每门课程都是最好的,并试图让学生的平均水平Mi向自己靠拢,如图 1所示。
学习过程中教师与学生之间的差异如下:
经过教师的教学后,学生个体每门课程成绩如下:
(2)学生学习阶段
学生跟教师学习完之后,班级中会出现成绩相对较好的学生以及成绩较差的学生,学生在这一阶段利用课余时间进行互助学习,成绩好的学生试图让成绩差的学生向自己靠拢,这一过程用数学模型表示为
2.2 PSATLBO算法
全局搜索算法普遍存在早熟收敛问题,TLBO算法作为全局优化算法同样存在这一问题。TLBO算法中教学因子TF影响种群个体向最优个体的聚集速度,进而影响算法整体的收敛速度和精度,因此TF的取值设计将是解决早熟收敛问题的有效突破点。TLBO算法每次迭代中TF随机取值为1或2,其中1代表学生没有学到知识,2代表学生完全掌握了教师的知识。但是这种求解过程未考虑到学生总体的“聚集程度”,若学生大多聚集于教师附近,算法容易陷入局部最优解;若学生过于分散,此时又不利于学生快速提高成绩(降低适应度值),因此,本文提出了一种参数自适应教与学优化(Parameter Self Adaption Teaching Learning Based Optimization,PSATLBO)算法。
为了分析种群中学生的“聚集程度”,引入群体适应度方差的概念,即
PSATLBO算法使用的自适应教学因子可根据种群的适应度方差进行调整。若种群适应度方差大,表明种群中学生距离教师的离散程度大,通过提高教学因子TF取值为2的概率,使下次迭代时大部分学生向教师靠拢;若种群的适应度方差小,表明学生大部分聚集于教师附近,通过提高教学因子取值为1的概率,增加下次迭代时大部分学生距离教师的距离,增强种群的多样性,避免算法早熟。
3 分数阶控制器设计及参数整定
分数阶PID参数整定适应度函数以积分误差为性能指标,根据是否加入时间项t分为ITAE准则以及IAE准则,其形式如下:
一般情况下,系统会在短时间内达到稳定,ITAE准则是以t和e(t)的乘积为被积函数,较小的t值会湮没误差e(t)带来的影响,并且系统的快速响应会导致较大的系统超调与振荡,因此,本文以IAE准则作为性能指标。
分数阶PID共有5个参数需要调节,在MATLAB脚本文件中编写PSATLBO参数优化算法,适应度函数在Simulink环境下搭建。
使用PSATLBO算法进行分数阶PID参数整定的步骤如下:
(1)估计分数阶PID设计参数向量(KP,KI,KD,λ,μ)的上下界pL和pU;
(2)设置PSATLBO算法种群数量、最大迭代次数,并初始化种群;
(3)根据式(7)~(12)计算种群的参数均值、适应度方差、教学因子;
(4)“学生”向“教师”学习,并判断学习后的适应度值是否优于之前值,若是,则更新“学生”参数;
(5)随机选择两个“学生”,适应度值差的“学生”按照适应度值好的“学生”更新参数;
(6)判断算法是否达到最大迭代次数,若达到最大,算法结束;否则,算法继续执行第(3)步。
PSATLBO优化算法流程图如图2所示。
4 仿真验证
分别选择整数阶系统、分数阶系统作为被控对象对PSATLBO-IOPID控制器、PSATLBO-FOPID控制器进行仿真验证。
4.1 IOS系统
为了验证控制器的性能,选取文献[26]中二阶系统作为被控对象,即
将PSATLBO算法中的种群数量设为10,经过50次迭代后得到的IOPID控制器和FOPID控制器为
文献[27]中采用DE算法得到的IOPID控制器参数和FOPID控制器形式为
文献[26]提出的第一Ziegler-Nichols準则设计的两个分数阶控制器形式如下:
采用传统Ziegler-Nichols参数整定方法得到的IOPID控制器如下:
上述控制器在输入为阶跃响应下的性能指标如表 1所示,本文提出的分数阶PID控制器较整数阶PID控制器在响应速度上提高69.8%,超调量减少92.6%,稳态误差减小32.4%。
为了对比各控制器控制效果,图3~4(ZN1-FOPID,ZN2-FOPID控制器响应时间较长,其阶跃响应如图4所示)给出了系统阶跃响应下时域内控制效果。
由仿真结果可知,本文设计的PSATLBO-IOPID控制器与PSATLBO-FOPID控制器均满足系统响应要求,与上述DE-IOPID控制器、DE-FOPID控制器、ZN1-FOPID控制器、ZN2-FOPID控制器、ZN-IOPID控制器相比,本文提出的PSA-TLBO-IOPID控制器和PSATLBO-FOPID控制器在超调量、调节时间、稳态误差方面均优于前者,且PSATLBO-FOPID控制器与PSATLBO-IOPID控制器相比,具有响应速度更快、系统超调更小的优点,满足系统快速响应、精确控制的目的。
4.2 FOS系统
由于飞行器设计领域中分数阶系统建模应用较少,且不属于本文研究重点,因此,选取文献[5]中加压重水反应堆(Pressurized Heavy Water Reactor)模型作为被控对象,其模型如下:
设计控制器性能要求为阶跃信号输入下系统超调量σ<5%,调节时间ts<7 s。本文提出的PSATLBO-FOPID控制器如下:
文献[5]设计的区间分数阶PID(Interval Fractional Order Proportional Integral Derivate,INFOPID)控制器形式如下:
文献[12]设计的分数阶内模PID(Fractional Order Internal Model Control Proportional Integral Derivate,FOIMCPID)控制器形式如下:
文献[14]设计的分数阶PI(Fractional Order Proportional Integral,FOPI)控制器形式如下:
上述控制器在輸入为阶跃响应下的性能指标如表2所示。
系统阶跃响应曲线如图5所示。
从仿真结果可知,文献[14]设计的FOPI控制器效果最差;文献[12]设计的FOIMCPID控制器虽然超调量与稳态误差指标稍微优于本文设计的PSATLBO-FOPID控制器,但是其响应时间与PSATLBO-FOPID相比慢两个量级,控制器设计时往往通过牺牲一定的超调量获取更快的响应速度,因此PSATLBO-FOPID控制器更具实用价值;文献[5]设计的INFOPID控制器与PSATLBO-FOPID控制器在上升时间、超调量相差不大,但是其稳定时间较长,稳态误差较大。综上所述,本文设计的控制器各项指标均满足设计指标要求,综合性能优于文献中的控制器,更具实用价值。
5 结论
本文针对控制器参数整定问题,分别以整数阶系统和分数阶系统为研究对象,提出PSATLBO参数优化算法,并设计了PSATLBO-IOPID控制器和PSATLBO-FOPID控制器,由仿真分析可得出以下结论:
(1)针对同一被控对象,FOPID控制器与IOPID控制器相比,设计自由度更大,系统超调量更小,响应速度更快;
(2)PSATLBO参数求解器更适用于IOPID和FOPID控制参数求解,同一被控对象,由不同参数求解器得到的分数阶PID控制器中,PSATLBO-FOPID控制器的综合性能优于传统算法;
(3)虽然目前工程实际中飞行控制器的设计大多采用经典PID算法,但随着弹载计算机性能的进一步提升,分数阶PID控制器在飞行器姿态控制中的应用会越来越多。
参考文献:
[1]Gutiérrez R E,Rosário J M,Machado J T. Fractional Order Calculus:Basic Concepts and Engineering Applications[J]. Mathematical Problems in Engineering,2010(4):242-256.
[2]Marinangeli L,Alijani F,Hosseinnia S H. Fractional-Order Positive Position Feedback Compensator for Active Vibration Control of a Smart Composite Plate[J]. Journal of Sound and Vibration,2018,412:1-16.
[3]Gonzalez E,Dorcˇák L,Monje C,et al. Conceptual Design of a Selectable Fractional-Order Differentiator for Industrial Applications[J]. Fractional Calculus and Applied Analysis,2014,17(3):20.
[4]Petrá I,Vinagre B M,Dorcˇák L,et al. Fractional Digital Control of Heat Solid:Experimental Results[C]∥Proceedings of International Carpathian Control Conference,2002.
[5]Lamba R,Singla S K,Sondhi S. Fractional Order PID Controller for Power Control in Perturbed Pressurized Heavy Water Reactor[J]. Nuclear Engineering and Design,2017,323:84-94.
[6]Wu Z L,Li D H,Xue Y L,et al. Tuning for Fractional Order PID Controller Based on Probabilistic Robustness[J]. Science Direct,2018,51(4):675-680.
[7]Cao J Y,Liang J,Cao B G. Optimization of Fractional Order PID Controllers Based on Genetic Algorithms[C]∥ Proceedings of 2005 International Conference on Machine Learning and Cybernetics,2005:5686-5689.
[8]Machado T A J. Optimal Tuning of Fractional Controllers Using Genetic Algorithms[J]. Nonlinear Dynamics,2010,62(1):447-452.
[9]Zamani M,Karimi-Ghartemani M,Sadati N,et al. Design of Fractional Order PID Controllers for an AVR Using Particle Swarm Optimization[J]. Control Engineering Practice,2009,17 (12):1380-1387.
[10]Maiti D,Biswas S,Konar A. Design of a Fractional Order PID Controller Using Particle Swarm Optimization Technique[J]. International Journal of Advanced Manufacturing Technology,2008,58(5-8):521-531.
