单片机在运用于超声波测试报警体系中的设计及其仿真研究①
2020-03-02 08:03王洪生
科技创新导报 2020年31期
王洪生
(硅湖职业技术学院 江苏苏州 215332)
超声波检测距离属于一类非接触式的测试技能,并不受到外部光线以及被测目标色泽等因素的影响,所以,超声波测距在移动机器人的研究上得到了广泛的应用。同时由于超声波测距系统具有以上的这些优点,在汽车倒车雷达的研制方面也得到了广泛的应用。
1 超声波测距报警体系设计主要原理分析
根据图1可知,单片机能够接纳超声波所输出的间距信号,且就该指标展开恰当的处置之后,能够通过屏显模块同步地呈现出超声波和障碍物间距。
依照我们的设定,单片机所传递出的是40kHz频率的方波式信号。通过放大效应之后,经由超声波发射器所输出。超声波的接收器装置在接纳到超声波的信号之后,通过放大器的放大效应,通过锁相环式电路展开检波的处置之后,开启单片机的中断流程,检测的时间是t。然后,经由软件的编程处理之后展开判断、运算,测试得到间距数值,且通过LED的相关数码管加以屏显。相应的原理图示可参见图2所示。
发射器在传递超声波之后,其在空气内的传播速率为v,在其抵达被检测的物体后反射再返回,并通过接收器所接纳。整个往返的时间是t。通过如下流程展开运算,即检测的距离L(m)数值为室温状态下声速340(m/s)与感应时间参量t(s)之积除以2,即可计算出被检测物体的具体间距数值。因为超声波属于一类声波,它的声速v和温度参量存在着内在的关联性,倘若温度的改变并不明显,那么能够认定声速处于基本恒定的状态。倘若测距的精确度非常地高,那么须经由温度的补偿方式进行及时的修改。
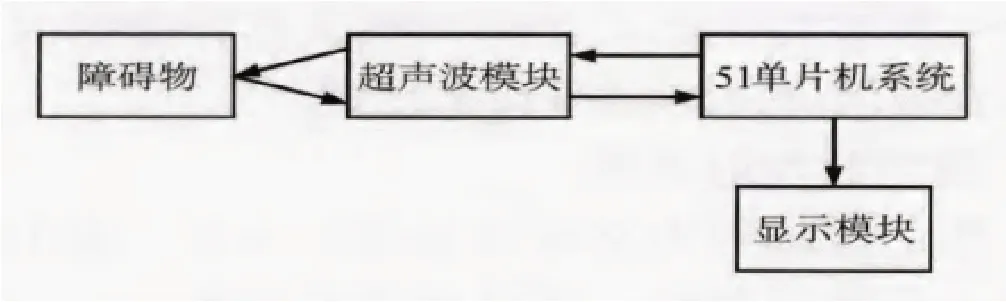
图1 超声波测距报警体系内部连接情况图示
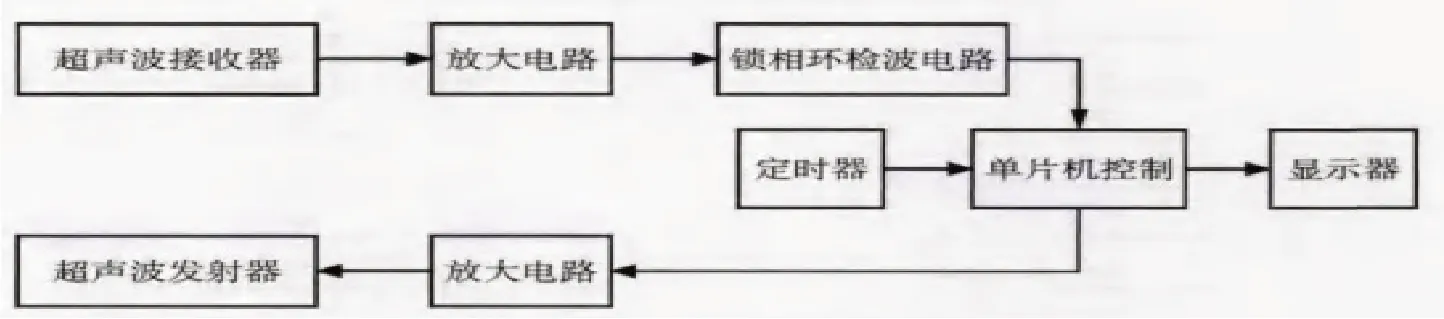
图2 超声波测试距离仪原理图示
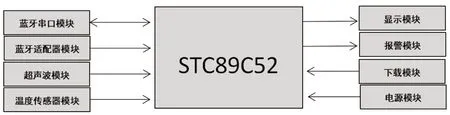
图3 超声波测试报警体系硬件电路图示
2 超声波测试报警体系中硬件电路的设计
本体系所设计的硬件电路的掌控轴心为单片机,根据超声波测试距离的原理可知,主要包括的模块部分有:单片机、超声波、蓝牙、报警电路、温度传感、显示电路以及电源电路等。此设备能够同步地观看和障碍物的间距,再者,在具体展开设计时设置单个具体的设定数值,若间距不足设定值时,便会立即传出一串“滴、滴、滴”的警报声,随着间距愈来愈短,警报声也变得愈来愈为急促。具体主要模块可参见图3所示。
单片机模块的主要组成为:晶振电路、STC89C52 单片机和流程下载模块等。单片机所采纳的规格为STC89C52,它属于一款8K规格的COM0S8微处理器,各项性能指标能够满足此体系运用。将P0口当作通用型的I/O口加以运用,应外部添加上拉式电阻设备。
至于蓝牙所采纳的为蓝牙HC-06规格的模块及其适配器。其中,下位机通过蓝牙HC-06 模块加以结合,再开通蓝牙适配器设备的PC 客户端就能够完成配对。另外,此模块在具体设计时,仅需配置如下的4条线即可:VCC所配接的为是+5V规格的电源;GND和地相接;TXD 属于发送端,和单片机中的P3.1引脚连接;RXD属于接收端,和单片机中的P3.0引脚连接。
所采用的HC-SR04超声波模块涉及到控制电路、超声波发射器以及接收器,能够完成2~400cm规格的非接触式测试,因此,实施3个共阳极LED数码管实时扫描并同步显示即可,该设备采纳P0 口内的P0.0、P0.3、P0.6当作数码管位挑选信号,所有的P2 口当作数码管段进行信号的选择。另外,温度指标在超声波传递速率时会发生一定的影响,出于提升体系测量精度的目的,应做好温度的采集工作,传感器的型号使用的是DS18B20,它的硬件设备接口较为简易化,性能平稳,除却和VCC 以及地表相连之外,仅需一根接口线和单片机中的P3.4引脚连接起来。
3 超声波测试报警体系软件设计
在设计系统软件时,采纳的是模块化的设计方案,主要涉及到主流程的设计、T0中止服务分流程、外界中止服务分程序、间距计算分流程、LED屏显分流程设计等方面。主流程第一步是初始化处理体系环境,设计定时器T0的工作范式是16位的定时计时器范式。置位总中止同意位EA且替屏显端口P0与P2清除为0。
其次,借助于超声波输出分流程传递出单个超声波的脉冲。出于规避超声波由发射器装置直接地传输至接收器而导致直射波的触发目的,因此,应延迟时间大概0.1ms,其后打开外部中断0接纳返归了的超声波信号。
在测试好间距值之后,把结果以十进制BCD码的途径传递至LED屏显时间大概为0.5s,接着,发出超声波脉冲,反复进行测试。出于优化流程的结构以及易于运算出间距值,主流程采纳的是C语言展开编写。
4 超声波测试报警体系中小车避障碍物模块的设计研究
在设计规避障碍物模块时,采纳的是超声波传感器设备,从而达到智能化避障的目的。由于超声波自身的频率并不低,且指向性明确,它的测距主要原理如下:根据实验数据表明,空气中超声波的传播速率为340m/s,当超声波在发射之后,其在具体传播时碰到障碍物时会出现反射的现象。检测超声波在发射与接收过程的时间差,就能够运算出所发射之点在碰到障碍物时的现实间距。因而,可以于车身之前处安置单个HC-SR04规格的超声波,借助于超声波测距性能,小车可以对前方挡路的障碍物产生感应现象,且可以在间距障碍物确定的距离时,及时地刹车。针对障碍物所处的具体方位而做出相应的反应。比如,障碍物处于左侧,小车就往右侧拐;又如,处于右侧则往左侧拐,达到规避障碍物的目的,遵从既定的线路线保持正常的运行状态。
相关的测距流程和原理如下:借助于单片机I/O口替TRIG端口处提供单个10μs规格的高电平脉冲式触发信息,模块智能化地传递8个数量的40KHz规格方波,且测试是否发生回波型信号;倘若测试到了回波型信号,那么ECHO 端即会传递出单个高电平,且高电平的持续性时间即为超声波由发射至返回的时间t。若ECHO端所传出的为高电平之际,单片机启动定时计数器,在输出了低电平后终止计时后,基于流程情况记取的具体时间值t,并测试距离,相应的计算函数式为(340*t)/2m。
5 超声波测试报警体系仿真分析
在借助于proteus展开仿真流程时,软件内因为并无超声波传感器展开仿真模型的计算,从而导致对所设计的电路进行硬件电路与软件设计的可行性证实过程制造了不应有的难度。出于证实设计的电路是否与要求相吻合的目的,借助于555时基电路组建单个单稳态式触发器。通过单片机P2.7传递出超声波信息之后,单稳态式触发器发出延时性的信号,从而仿拟超声波由输出之后碰到障碍物再返回后的过程,根据该过程所耗费的时间调控滑动变阻器的位置,等同于调控迟滞性时间情况,对超声波传感器所搜集的信号进行模拟操作。
当按下开关键时对超声波的间距警报值进行重新设置,例如,假设警报电路中的K1和K2开关,每当K2按下时,数字同步增加1。同时设置安全间距的min值为1m。当示波器所搜集到从传感器所输出的信号后,设置第一个信号是P2.7所传递出的超声波信号,开启计时器的第4个信号p3.5输出超声波的信号,开启计时器的第4个信号,p3.5则变成高电平,在接收了返回信号后变成低电平。基于高电平连续性时间即能够运算出具体的距离值。
6 结语
本文主要基于STC89C52规格的单片机当作控制的轴心,借助于红外线测试技术展开轨迹的跟踪过程,运用超声波传感器工具展开智能化规避障碍物的设计。在阐明超声波测距报警体系主要原理的基础上,依次阐述超声波测试报警体系中硬件电路和软件的设计情况,设计超声波测试报警体系中避障碍物模块情况,具体实验超声波测试报警体系仿真情况。
猜你喜欢
厦门大学学报(哲学社会科学版)(2023年6期)2023-12-18
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年17期)2018-09-28
军事文摘·科学少年(2016年7期)2016-09-20
小学生导刊(低年级)(2016年5期)2016-05-27
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22
城市道桥与防洪(2014年5期)2014-02-27