
氢-锂电混合动力中低速磁浮列车的设计
2020-02-23 09:12
中国新技术新产品 2020年24期
(北京中车长客二七轨道装备有限公司,北京 100068)
0 引言
中低速磁浮列车是一种现代高科技交通工具,它通过电磁力实现列车牵引、悬浮和导向,较常规地铁车辆具有噪声低、爬坡能力强等特点[1],特别适合于市内高架运行及旅游专线。因接触轨及变电所建设成本及其他因素,部分线路不适合全线铺设供电轨,针对这种线路,亟需车辆自带动力。目前磁浮列车因空间及重量限制,配置的电池容量低,仅能用于库内调车使用。采用超级电容做为储能单元的磁浮列车可作为磁浮客运车辆使用,但需要在每个站台设置充电设备为超级电容充电,站台建设成本高。该文设计的磁浮列车采用燃料电池+锂电池混合动力技术,解决了车辆自带动力运营里程短的问题。氢-锂电混合动力系统在磁浮列车上的应用功能主要有:氢燃料电池独立提供电能驱动磁浮列车运行;锂电池独立提供电能驱动磁浮列车运行;氢燃料电池和锂电池共同提供能量驱动磁浮列车运行;受流器提供能量驱动磁浮列车运行;氢燃料电池给锂电池充电;列车制动能量回收给锂电池充电等功能。
1 车辆组成
氢-锂电混合动力磁浮列车包括端车和中车2种车型,2种车型均带自动力,根据不同线路及运量需求,可设置不同的编组。端车和中车的主要区别是端车设置了司机室和操纵台,其他包括牵引系统、制动系统、悬浮系统配置基本相同。
与商业运营线路北京S1线和长沙线类似,每节车辆配置5个悬浮架,悬浮架通过滑台与车体底架相连。牵引电机及悬浮电磁铁安装于悬浮架,牵引逆变器、燃料电池、锂电池、高压箱、DC/DC电源安装于车体底架,空调机组和储氢系统安装于车顶。每节车车顶设置2个空调机组和1个储氢系统。
2 车辆性能特性
车辆的顶层参数见表1。
3 燃料电池
燃料电池将燃料具有的化学能中的吉布斯自由能部分转换为电能,不受卡诺循环效应的约束,理论上可以在接近100%的热效率下运行。同时燃料电池不包括运动部件,工作非常可靠。从1839年由W.Grove提出到现在已经有180多年的历史。我国从1958年开始研究燃料电池,目前中国的燃料电池主要包括生物燃料电池、磷酸燃料电池以及熔融碳酸盐燃料电池、固体氧化物燃料电池、质子交换膜燃料电池等[2-4]。质子交换膜燃料电池因其具有优异的性能,适合在车载中使用。该文选用质子交换膜燃料电池作为磁浮车辆动力能源。
4 基本原理
燃料电池是车辆能量的主要来源,其工作原理如公式(1)和公式(2)所示。

氢燃料电池的工作原理示意图如图1所示。
氢气到达燃料电池的阳极后,在催化剂的作用下氢分子中的电子被分离出来,失去电子的氢离子穿过质子交换膜到达燃料电池的阴极,而电子不能通过质子交换膜,只能通过外电路到达燃料电池的阴极,在这过程中外电路产生了电流。回到燃料电池阴极的电子与氧原子和氢离子重新结合为水。
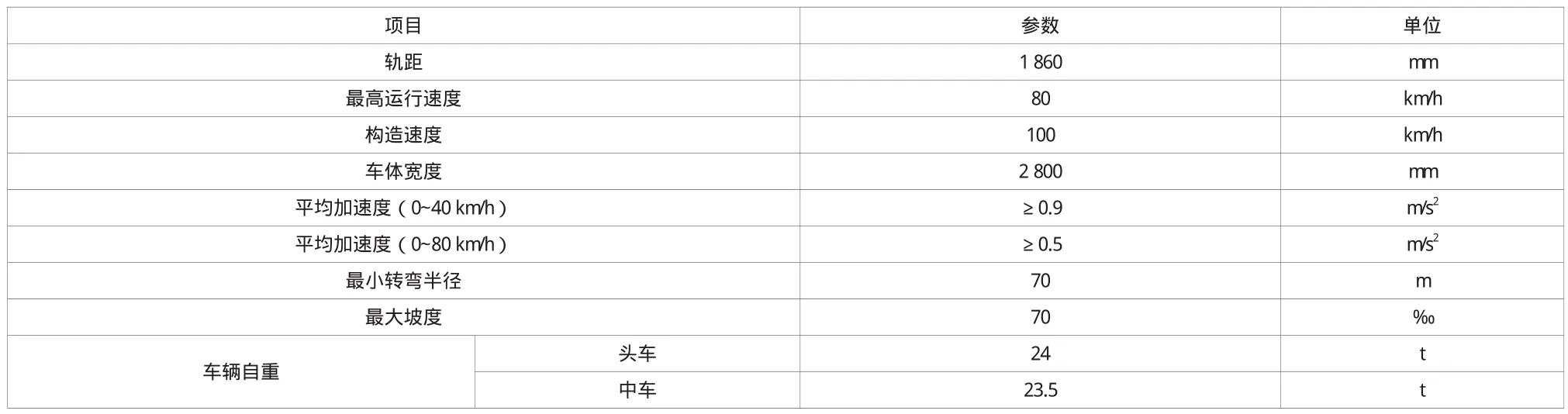
表1 车辆性能参数
5 燃料电池配置
燃料电池主要包括4个WFC85燃料电池模块及附件系统,主要参数见表2。
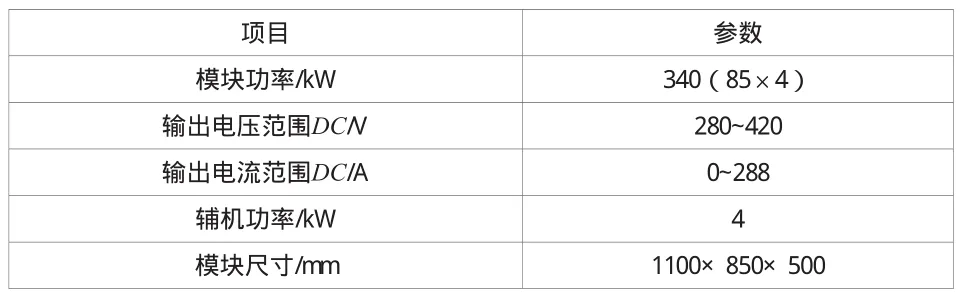
表2 燃料电池模块参数
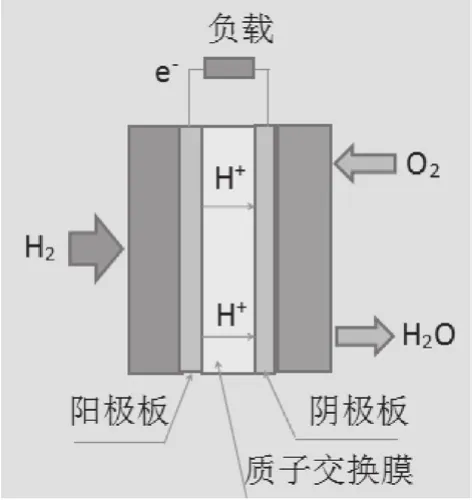
图1 质子交换膜燃料电池原理
6 储氢系统
储氢系统用于储存高压氢气,提供给燃料电池用于化学反应生成电能。主要器件包括18瓶组储氢系统及与燃料电池连接的管路。储氢系统的参数见表3。
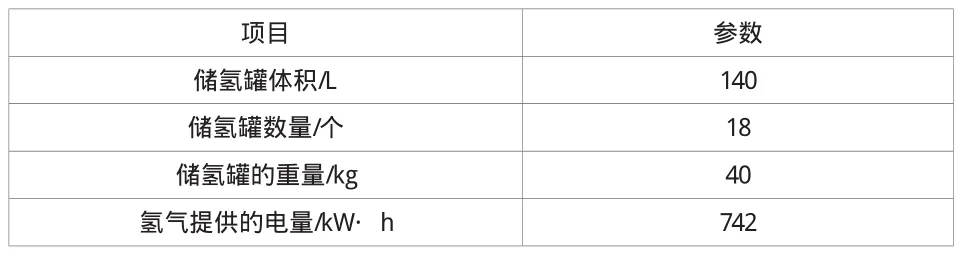
表3 储氢系统参数
7 供电系统
为了增强列车的适应性,为每节车配备了3种电源。1) 通过受流器从电网受流。2)通过燃料电池提供电能。3)通过锂动力电池提供电能。单节车的供电主回路如图2所示。主电路中设计了DC/DC电源装置,该电源能够实现能量双向流动,与高压电器箱配合实现3种电源的无缝连接。DC/DC电源与锂动力电池和燃料电池通过CAN通信方式实现信息共享,实现能量最优配置。三者能量流向已在图中示出。每节车之间通过高压母线相连,当其中1节车供电系统故障时,其他车辆为故障车供电,不影响整车动力输出。
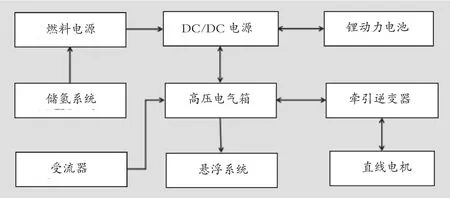
图2 车辆供电系统
8 系统构成
8.1 车体及车下电气设备布置
车体结构采用中空闭口的铝合金型材全焊接整体结构。悬浮车辆车下设备多,空间受限,电气设备在设计的初期就要规定最大设计尺寸,防止车辆在运行时与悬浮架干涉。为了达到更好的电磁兼容效果,该设计车辆车下电气布线采用高、低压分开走线,并在适当的位置增加屏蔽网,防止因电磁干扰导致设备异常工作。图3为端车车下布置方案,每个悬浮控制器控制2个电磁铁线包,每节车配置20个悬浮控制器。
8.2 制动系统
列车的常用制动采用电制动,制动能量通过DC/DC电源回收到锂电池,根据不同线路条件对锂电池采用不同的充、放电策略,最大限度地回收制动能量。车辆低速时电制动不能产生足够的制动力,此时采用液压制动补足制动力。液压制动系统采用车控方式,每辆车安装10套制动夹钳,满足70‰的坡道停车要求。
8.3 牵引系统
每节车设置了1台牵引逆变器和10台直线电机,电机的连接方式为5串2并。电源由燃料电池和锂电池通过双向DC/DC提供,也可通过受流器为牵引逆变器直接提供能量。
列车在运行中所受到的阻力主要包括电磁阻力、受流器阻力、坡道阻力和空气动力学阻力。按照HSST-100L给出的计算公式进行计算。
电磁阻力如公式(3)和公式(4)所示。

受流器阻力(基本是常数)如公式(5)所示。

空气动力学阻力如公式(6)所示。

坡道阻力如公式(7)所示。

总阻力如公式(8)所示。

式中:N为车辆数;W为车重,t;V为车速,m/s;α为坡角;g为重力加速度。
根据电机及车辆参数,计算得到的整车牵引特性曲线如图4所示(以3节编组为例,平直道)。
8.4 悬浮系统
悬浮系统的主要功能是保证悬浮电磁铁与F轨间的间隙始终保持在预定范围内,使车辆稳定悬浮并在运行中快速跟踪轨道。悬浮系统主要由悬浮控制器、悬浮传感器和悬浮电磁铁组成,每节车设置了20个悬浮控制器对悬浮电磁铁独立控制,发生单点悬浮故障时不影响整车运行。
8.5 受流器控制系统
由于车辆运行于电气化和非电气化区间,受流器会根据有无供电轨而进行频繁的升/降靴工作。因此,在列车上安装了受流器控制装置来接收来自地面的位置信息,自动识别车辆所在位置的接触轨状态,根据位置信息进行升/降靴控制,保证供电轨及行车安全。
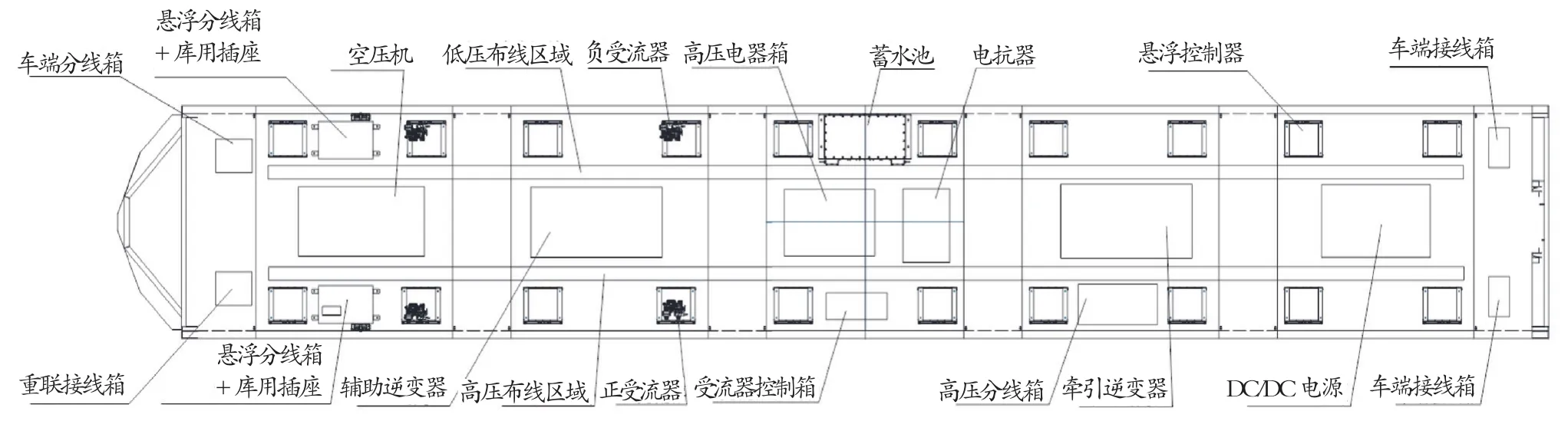
图3 端车车下布置(不包括悬浮架及制动系统)
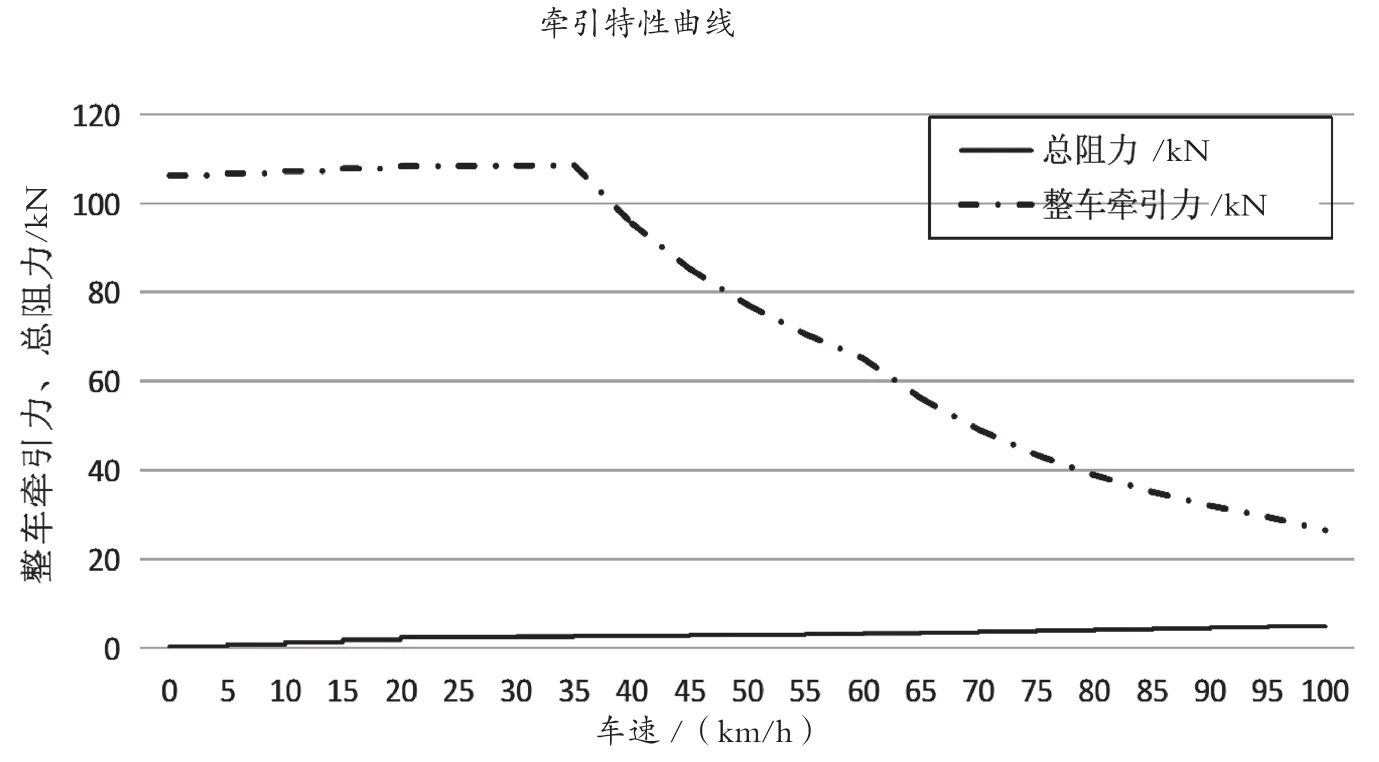
图4 牵引特性曲线(3编组)
9 结语
该文提出了基于燃料电池和锂电池供电的中低速磁浮列车的方案,对车辆各电气系统进行了简单的介绍,通过计算验证了方案的可行性。该车辆是一种节能、环保、高效的新型列车,截至目前,燃料电池的功率还很有限,成本相对于其他能源仍然较高。从环保和轨道建设成本上来说,基于氢燃料电池和锂电池供电的磁浮车辆是一种具有巨大潜力的轨道交通工具。随着燃料电池技术的发展,燃料电池的功率等问题会得到逐步解决,基于燃料电池的中低速磁浮车辆会有更好的发展前景。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
中国特种设备安全(2022年4期)2022-07-08
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
车迷(2017年12期)2018-01-18
电子制作(2017年10期)2017-04-18
信息记录材料(2016年4期)2016-03-11
电源技术(2016年2期)2016-02-27
材料科学与工程学报(2016年5期)2016-02-27
电源技术(2015年7期)2015-08-22
汽车与新动力(2014年4期)2014-02-27
