
工业物联网下的AGV智能小车应用研究
2020-02-08 08:41吴琦
智能制造 2020年10期
吴琦
摘要:一场科技革命成就了智能时代的来临,进入二十一世纪以来,我们的生活发生了翻天覆地的变化,随着人们的追求越来越高使得越来越多的智能化产品被相继开发出来,也促进了各行各业不同领域的跨越性发展。本课题所研究的AGV智能化小车,在工业物联网的大背景下,有效地解决了工厂里面产线供货缓慢的问题,且省去了大量的人工成本。AGV:是一种利用电磁触发和光电感应从而能在预先设定好的轨道上自由行使的智能小车。本次设计的AGV智能小车采用车体结构比较简单,各功能模块清晰明了,易实现,普遍应用于物联网产业。
关键词:工业物联网;AGV;智能车
1 引言
2012年5月,工信部发布了《智能制造装备产业“十二五”发展规划》,以机器人为代表的自动化装备及智能制造解决方案,迎来了战略性的发展契机。
2015年5月国务院签发《中国制造2025》部署全面推进实施制造强国战略,是我国实施制造强国战略第一个十年的行动纲领,为中国制造业未来10年设计顶层规划和路线图,通过努力实现“中国制造”向“中国创造”、“中国速度”向“中国质量”、“中国产品”向“中国品牌”的三大转变,推动中国到2025年基本实现工业化,迈入制造强国行列。从十八世纪工业革命以来人们在一直在追求高效率高产量的追求延续到今天从未停止。然而进入二十一世纪,在世界经济发展脚步放缓的今天,随着人工成本的增加,越来越多的企业选择使用自动化机器人代替人工成本,速度不仅比人工快,质量上也更有所保证,这其中就有本课题所研究的自动化项目——AGV智能小车。
众所周知,自动化项目近几年来在各行各业一直扮演着越来越重要的角色。可见它的重要性之高。
2 课题研究目的
本课题所研究的AGV智能化小车有效地解决了工厂里面产线供货缓慢的问题且省去了大量的人工成本。智能车以AT89S52单片机作为控制核心,采用金属感应器TL-Q5MC来感应和识别路上铺设的磁条轨道,采用了1602LCD显示屏用来记录时间等信息,采用霍尔元件A44E检测小车行驶速度。车体结构比较简单,各功能模块清晰明了,易实现,普遍应用于物联网产业。
虽然车体结构设计简单,但是设计研究本课题还是有一些关键问题,主要有:(1)基于单片机原理中断信号的发送和接收;(2)对小车各功能模塊稳定性、实用性与可靠性的综合考核;(3)无线调度系统在后台对小车的有效控制。从这三个方面出发,解决了这三个问题就直接诠释了本课题的意义。
3 AGV智能车设计任务
设计并开发一个AGV智能物流小车,使其能在预定轨道上自由行使。在物联网智能车间中,希望小车路线图及解析如图1所示行驶。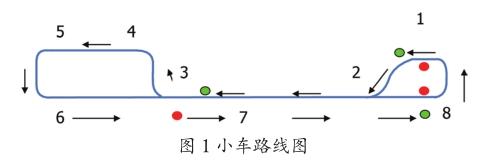
3.1 基本线路解析
(1)1点上料出发:定位磁条( 位置)及上料卡( 位置)。
(2)2-3距离较远,需加速,高速行驶。
(3)到3点前往4点需要:先贴减速磁条( 位置)及右转卡( 位置)。
(4)3-4-5距离较短,不需要加速。
(5)5-6无路线分支,及5点为正常行驶速度时,无须贴加速及转弯卡。
(6)6-7距离较远,加速,高速行驶。
(7)到7点需要:先贴减速磁条( 位置)及左转卡( 位置)。
(8)7点读卡后回到出发点1点。
3.2 智能车设计思路
按照车间的规划布局,从一楼物料发车,车走至电梯口进入电梯行至二楼,然后沿着直线经过加速一最短的时间行至车间门口拐弯处然后减速进入车间,这时候车道路线由直线型转为U型曲线。途径转弯处按照事先预定好的轨道路线自动刷卡自动变道,该动作由单片机控制。最终到达各站终点后小车停止行驶,由工作人员帮忙卸货然后把空箱继续装载上车带回,启动复位小车正常发车行驶。在小车装满各站空箱之后小车U型路线基本已经走遍,由于车间结构原因小车这时候将进入S型车道,一直到达二楼电梯门口等待下楼最终到达库房备料区一楼。车间架构展示与分析如图2所示。
测量小车在直线型车道、S曲线型及U型弯道的时间、速度及稳定性。并在遇到问题时的状况及解决措施。主测车道为S型和U型。
车辆先沿着S型轨道行驶,再逐步进入U型车道,速度由缓变快,自动沿着磁条轨道寻找站点位置。当小车偏离轨道或者感应不到磁条的时候,小车会自动停止。并向我们控制调度系统发出信号告诉小车状况前来处理,同时小车本身语音模块会发出轨道偏离的音乐用来提醒技术人员。小车行驶之前在车身安装行车记录仪观察小车沿途所遇障碍并各区域行驶时间,速度和路程通过LCD显示在屏幕上。
4 机构组成、系统控制与检测
4.1 LCD的选择与应用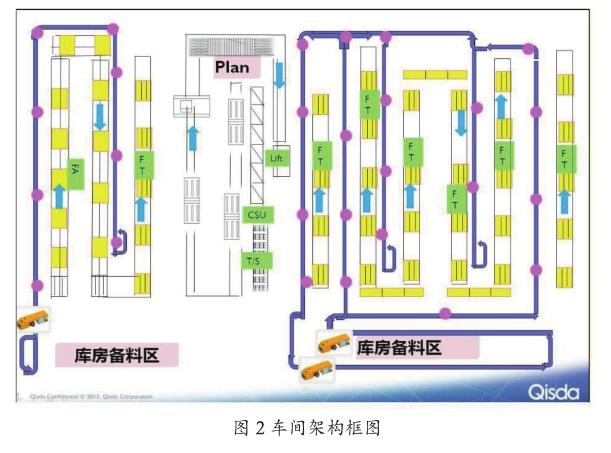
在本次的设计中我们采用了1602LCD显示屏。LCD的背光是用单片机控制的目的是节约电源。我们在LCD显示的设计上实现了比较人性化多功能模式。其中包括仪表(用来显示时速及相关数据)、快捷按键(用来防止信号传输出现故障从而能及时处理有效避让)、方向键(用来实现手动控制)以及实时联系(第一时间发送信号到调度系统那边从而实现第一时间解决)。
4.2 行车检测与维护
采用磁条感应器TL-Q5MC来检测路面上的磁条继而发送信号给单片机来中断脉冲。接线原理图如图3所示。
我们在小车车盘距离地面大约4 mm左右的位置下安装了一个金属感应器,在小车的行驶过程中,小车会自动识别判断地面上铺设的磁条从而控制方向,当感应器感应到磁条是将自动对单片机发送中断信号,这时候单片机收到信号后自动运行中断,从而自动改变电动机驱动信号的电压占空比,继而来改变小车的行驶速度,小车的行驶速度是根据小车沿途所遇障碍物的多少而改变的,当小车行驶至空旷较少的障碍物环境下,单片机会自动发送信号进行加速前进,相反如果前方所经过环境障碍物较多的话会自动发送信号进行减速从而提高小车的使用效率。另外我们在小车所经过的每一个路口处都有增加磁卡来读取命令传输信号给单片机执行,我们有专业的AGV调度系统来随时监控和控制机器的前后左右方向。
4.3 速度检测方案比较
4.3.1 方案1
霍尔开关元器件。霍尔开关是一种高灵敏度的InSb霍尔元件,它可以根据磁场强度,原霍尔直接输出电压的变化。广泛用于电机控制领域中,它可以根据应用的信号处理的实际情况,从而达到有效转速控制功能。霍尔元件在应用中优势明显,其结构坚固、体积小、重量轻、使用寿命长、安装方便、低功耗、高频率(高达1 MHz)、耐冲击、不怕灰尘、油污、水和盐雾污染或腐蚀。电路简单、价格便宜、安装方便,并且没有特别具体的电源要求。
4.3.2 方案2
红外传感器测速。红外传感器分为对外式和反射式两种,但最终不管选择哪一种性价比都不高且价格昂贵。所以最终通过对方案1、方案2的比较及各自的优缺点,综合多方面因素决定选用方案1,原理接线图如图4所示。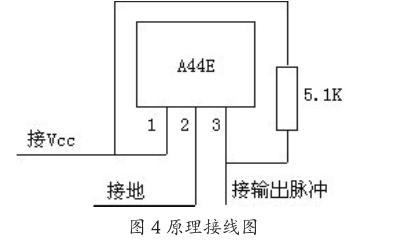
5 路径选择
根据智能车间场地与空间的布局,小车走动的模式大致分为三种模式,分别是直线型、S与U型还有自动型。
直线型是规划一条直线车道用来测试小车的性能。目的是顺利走完全程,然后清晰地记录下小车在不同路线段内所用到的时间,包括通过高速区域、中速区域以及低速区域这三个时间段所用的时间。
S型和U型是利用生产车间S型和U型的特点对其进行测试。按照预定设的磁条轨道小车能自动识别轨道前进行驶,当小车行驶至交叉口或十字路口时,小车自动读取拐弯处的磁卡从而改变方向行驶,若小车末读到则自动传输型号给调度系统,从而继续返输信号指使其正确前行。当走完S型、U型轨道时,小车会自动停止。之后自动进入菜单由使用者选择要看的内容时间、平均速度和所走的距离等信息。
而自动型则是小车选择不同的速度行驶,先以同一速度走完全程,然后再以相同的速度退回起点,再调整速度选择升速或者降速再在一定的时间内走完。走完后LCD显示的内容与直线型所走的内容具有一致性。
直线型、S型和U型使用的中断口和感应磁条、感应速度所使用的中断口是一样的。原理图如图5所示。
将AGV智能小车的硬件组装,按照各个模块的接线电路图逐一安装。完成各功能模块的组装后,将各个单个体按照总线型结构整合在一起,初步完成小车半成品。再对各个功能模块进行檢测和验证。在完成了最重要的功能验证环节之后,接下来就是小车的实验——试跑。将小车集中到有着环形轨道的实验基地进行试跑,主要验证其功能性,稳定性及成功率。通过准备、组装、验证和实验考核之后,最后将小车导入智能车间产线使用,如图6~8所示。
6 结语
随着人工成本的增加,越来越多的企业选择使用自动化机器人代替人工成本。如本课题所研究的AGV智能小车可以降低企业人工成本,更好地提高产品质量。
国内同行业智能车间基本处在产品信息自动采集及生产作业半自动化阶段,国外有部分为人机结合的自动化生产车间,但均不能完全实现无人化作业;同时国内外相关同行均为批量生产方式,无小批量定制化生产。通过车间智能化改造实施前后社会、经济及环境效益对比,在提升智能制造水平、提高产品质量、促进安全生产和实现绿色发展等方面取得了很好的经济和社会效益。
参考文献:
[1]胡乾斌.单片微型计算机原理与应用[M]. 武汉:华中科技大学出版社,2005.
[2] 陈无畏,施文武,王启瑞等.基于动力学模型的自动导引车智能导航控制研究[J].农业机械学报,2003,34(4):90-93.
[3] 孙传友.测控电路及装置[M].北京:北京航空航天出版社,2002.
[4] 胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.
[5] 殷晓光,付庄,曹其新等.蓝牙无线通讯技术在AGV中的应用[J].机械与电子,2003(02):19-22.
[6] 陈超.叶庆泰.基于图像引导的自动导引小车系统设计[J].机械设计与研究.2004(01):65-67+8.
2020年度苏州市社会科学基金项目(应用对策类)“苏州抢抓机遇加快工业互联网发展对策研究”(项目编号:Y2020LX097)
