
基于通用服务器平台的S模式二次雷达系统研制
2020-02-05 02:19水泉黄涛
电子技术与软件工程 2020年7期
水泉 黄涛
(1.安徽四创电子股份有限公司 安徽省合肥市 230092 2.中国电子科技集团公司第三十八研究所 安徽省合肥市 230088)
1 概述
近年来随着航空业的快速发展,传统基于全呼体制的A/C 模式二次雷达在使用中出现了诸多问题:因飞行密度的增加,应答信号脉冲的同步和异步干扰越来越严重;受A/C 模式编码长度限制,飞机代码重复引起飞行计划相关错误;机场周边建筑物的增多造成多径和反射带来的虚假目标等,这些问题对空中交通管制影响日益严重,给飞行安全带来较大的隐患。为解决传统A/C 模式二次雷达体制缺陷,国际民航组织制定了S 模式二次雷达标准,在S 模式系统每架飞机应答机分配了全球唯一的24 位地址码,S 模式雷达通过基于地址的选择性询问对飞机进行跟踪,在S 模式下雷达询问脉冲调制方式由幅度调制改为了差分相位调制,有效的增加了上行链路带宽,因此S 模式雷达除可完成正常的目标监视询问外还具备了地空数据通信能力,地面自动化管制系统通过S 模式雷达可获取更多的机载飞行参数,进而提高空中交通管制能力。
目前中国民航已在全国范围推广S 模式技术应用,华东、中南等飞行密度较高地区已启用了S 模式增强监视应用。但国内在用的具备完善S 模式能力的二次雷达主要还是泰雷兹、Indra、Selex 等进口型号雷达,而国内部分厂家的二次雷达的S 模式也已具备基本监视能力,但增强监视功能不够完善,数据链和协同组网功能尚不具备。针对目前国内外二次雷达现状,为满足中国民航S 模式应用需求,中国电科集团四创电子立项研制新一代具备全S 模式功能的空管二次监视雷达。
2 系统组成和关键模块实现
本项目所研制的S 模式二次雷达主要由大垂直口径天线、天线驱动系统、发射机、接收机、信号和数据处理服务器组成,如图1所示。和传统的二次雷达不同本雷达的信号处理、航迹处理都是基于一台通用服务器实现,该服务器采用高性能多核X86 架构处理器,软件平台采用开源的LINUX 系统。基于开放的通用服务器平台实现了精细化的信号处理和航迹跟踪算法,特别是服务器计算能力强和编程灵活特点,实现了更加灵活的基S 模式自适应选址询问,提高了雷达的目标处理容量和抗异步干扰能力。
2.1 大垂直口径天线
天线采用大垂直口径设计,余割平方赋形,在垂直面形成低空锐截至波束形状,在水平方向形成和、差、控制三个波束。其中和波束由前向35 根列馈合成为高增益、低副瓣、窄波束的笔形波束,主要用于目标探测;左右各17 根列馈组成两个子阵面合成为差波束,与和波束一起用于单脉冲测角;背馈辐射单元和前向列馈一起合成为控制波束,控制波束为全向波束用于副瓣抑制。如图2 所示。
2.2 高占空比发射机
S 模式二次雷达要求具备扩展数据链通信能力,该功能需要能够连续对48 个飞行目标进行询问的同时发送56bit 数据,在此模式下要求二次雷达发射机的瞬时占空比达到63.7%,平均占空比达到5%以上。
为满足全S 模式功能的技术要求,雷达发射机采用集中合成式全固态设计,核心放大模块采用固态发射机管进行合成,使其满足高发射占空比要求并增加功率管的可靠性。采用了软件可配置的发射机脉冲调制技术,可通过软件对二次雷达询问信号的脉冲上升沿和下降沿进行精确设定,抑制发射机高次谐波,使其满足国际民航对S 模式雷达发射频谱要求。发射机原理框图如图3 所示。
2.3 数字接收机
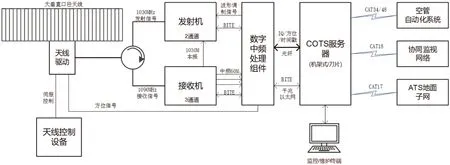
图1:雷达系统组成框图
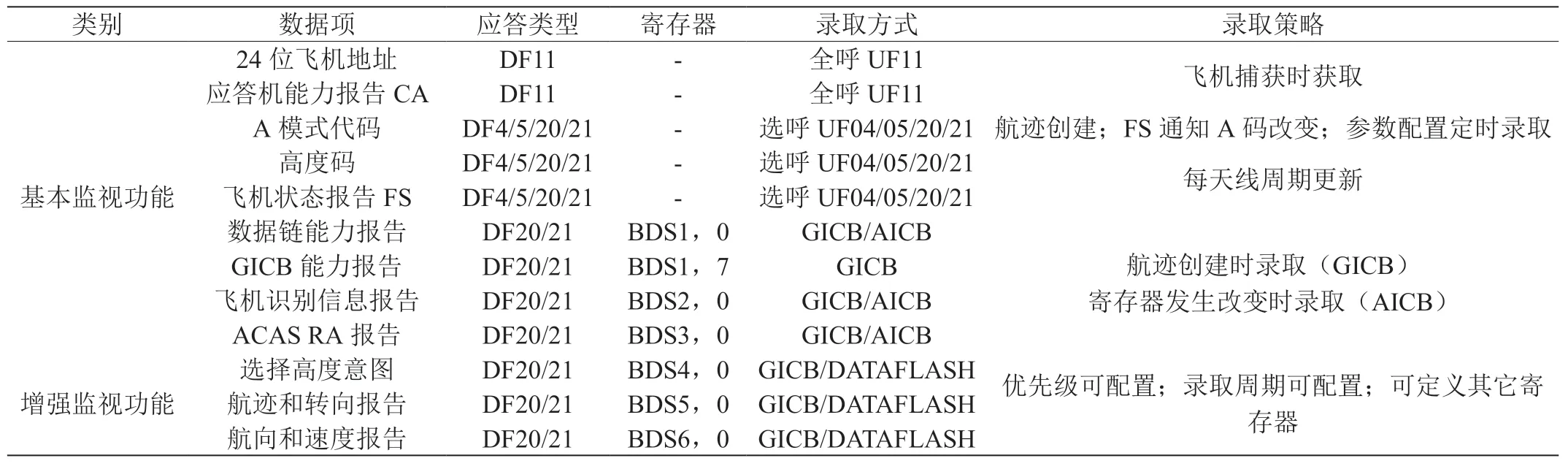
表1:S 模式基本监视和增强监视录取策略
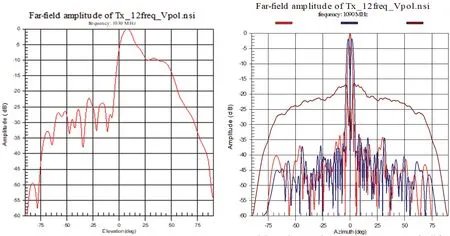
图2:天线垂直和水平方向图
本雷达的接收机包括三通道接收前端和数字中频处理两个组件。三通道接收组件将天线接收的三路1090MHz 和、差、控制信号进行放大,下变频为60MHz 中频信号。该组件采用了基于平衡式放大器的接收机设计,主要由限幅低噪声放大模块、镜频抑制滤波模块、下变频模块、中频滤波模块、中频放大器、低通滤波器、衰减器等组成,具有噪声低、稳定性好、输入输出驻波小、抗干扰能力强以及宽动态范围等特点。
数字中频处理组件包括数字下变频和波形产生两个模块,其中数字下变频模块通过高速AD 对接收机输出的三路中频信号进行过采样,在FPGA 进行DDC 后,分别形成三路IQ 信号,通过光纤接口将IQ、方位、时间戳等数据打包成数据帧传输给服务器。波形产生模块通过光纤接收服务器发来的发射波形列表,按照模式对应的调制方式动态产生调制信号送给发射机。相对于传统数字中频处理,本雷达数字功能更加简化,减少了对FPGA 算法处理复杂度,降低了芯片成本和开发成本。
2.4 信号和数据处理服务器
目前国内外厂家二次雷达的信号处理和航迹处理系统依赖于FPGA、DSP、嵌入式计算机等多个设备组件实现,信号接口和种类繁多,而FPGA/DSP 芯片编程复杂度较高,使得二次雷达信号处理算法研制开发、仿真调试难度较高,特别是受限于芯片内部资源,很难在后期对算法进行改进和功能升级;受FPGA/DSP 芯片厂商供货周期影响,雷达厂商需要考虑雷达长达15-20年内生命周期内的备件生产,提高了整个雷达的使用和维护成本。另外航迹处理计算机大都采用了授权费用高昂的实时商用操作系统,一方面带来整机成本增加,另一方面也导致了雷达数据处理软件受制于国外非开放的操作系统,带来系统改进升级的风险。
采用基于全软件化的二次雷达信号处理和数据处理系统架构,将二次雷达原来通过FPGA/DSP 实现的信号处理功能,以及嵌入式计算机实现的航迹处理功能,全部由一台基于X86 架构的机架式服务器实现。
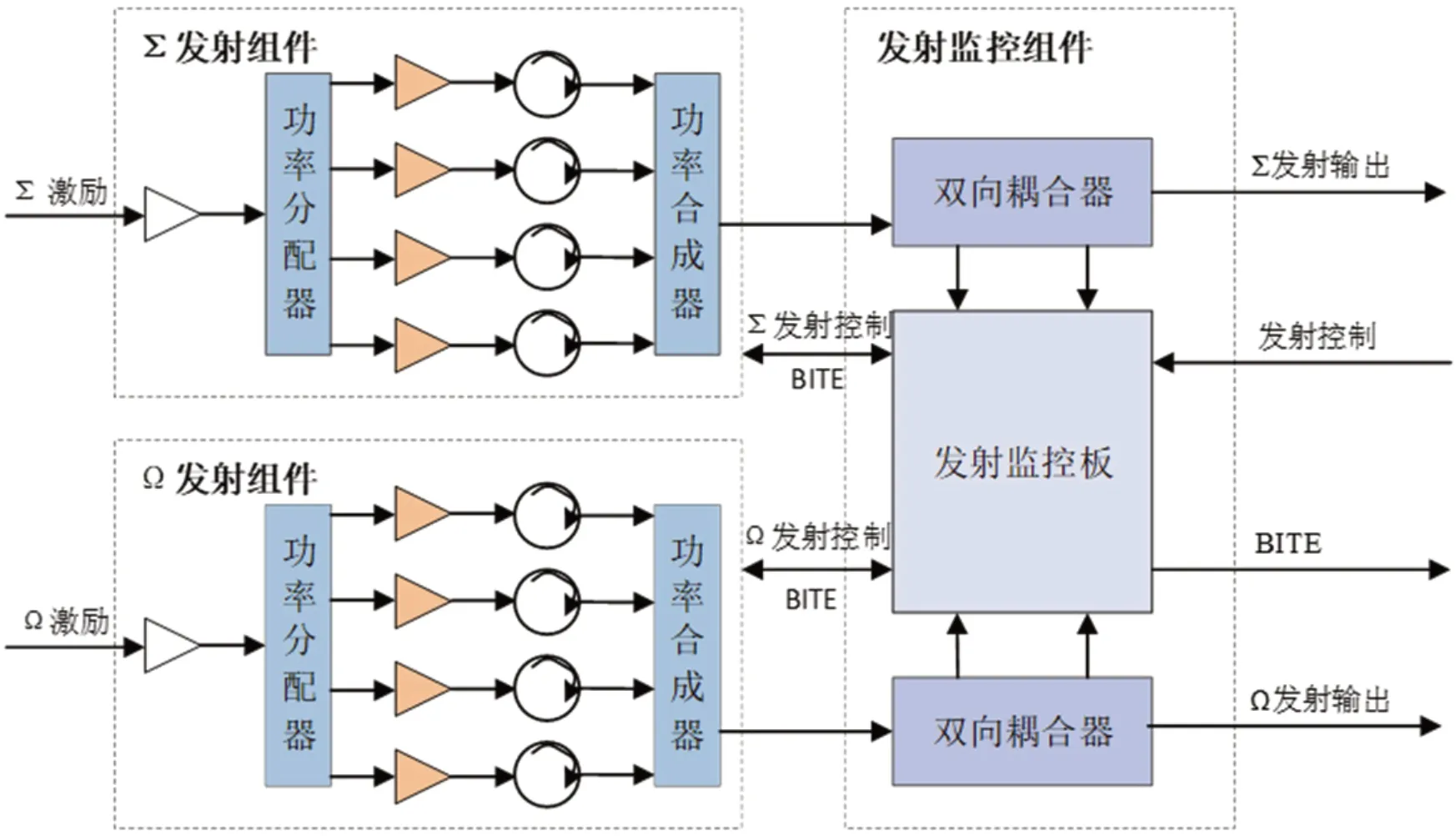
图3:发射机原理框图

图4:录取服务器组成和接口
服务器软件平台采用开源的Linux 系统,雷达的功能模块自底向上分为三层:信号处理层、数据处理层及应用接口层,每层又有若干个软件模块构成。所有软件模块均采用标准C 语言开发。服务器内信号处理软件主要采用线程池技术,在同一接收时间窗内创建多个线程,并行处理多个时间片的应答信号;对每个时间片的原始IQ 信号进行幅相校正、取模、脉冲提取、应答解码、抗异步干扰等处理以获取目标应答数据。服务器数据处理软件主要包括监视数据处理,主要包括点迹处理和航迹处理,以及通信链路管理主要选址询问列表管理、数据链管理等。服务器应用接口软件主要实现和自动化系统的接口协议处理、协同监视网络接口控制协议以及数据链接口协议等处理。
软件化的二次雷达架构极大方便了二次雷达产品研发和调试,减少了雷达开发周期和维护费用,特别是采用Linux 系统作为信号处理平台,摆脱了对国外商业操作系统的依赖,另外得益于服务器高计算性能和大容量存储,本项目研制的二次雷达实现了更加智能的自适应选址询问方法,复杂环境下的精细化航迹处理算法,提高了抗异步干扰能力。录取服务器组成和接口如图4 所示。
3 关键技术
3.1 自适应目标选呼询问方法
S 模式选呼询问是S 模式二次雷达的技术关键,选呼询问安排的合理性是决定了二次雷达S 模式目标处理能力。和常规采用定向或者全向天线的无线移动通信体制不同,S 模式二次雷达的阵列天线为保证目标的方位探测精度,一般天线波束较窄(小于2.5°),同时天线采用机械扫描方式工作以及飞机运动速度较快,使得目标驻留在天线波束时间极短。为保证波束内的所有目标能够被准确捕获、跟踪并完成数据传输,需要设计高效的基于时间和空间的选址询问算法。本雷达实现了一种自适应的目标选呼询问方法,可针对雷达使用场景和飞机密度,自动调整目标询问顺序;可根据目标任务优先级高低,优先处理监视询问;可根据波束内目标数量,动态调制全呼和选呼周期。
3.2 S模式基本监视和增强监视录取策略
在S 模式系统中机载应答机包含256 个寄存器,称为BDS(Comm-B Data Selector)。每一个寄存器有56 位长,可以被询问机实时录取。这些寄存器存储了飞机信息,如飞机速度,呼号、ACAS(机载防撞系统)、选择高度等。S 模式二次雷达可通过两种方式获取飞机的BDS 数据:地面发起的COMM-B 协议GICB 和基于MSP 服务的Dataflash。GICB 由S 模式询问机发起选呼询问,在询问中包含指定要录取的寄存器地址,而应答机则将56bit 寄存器数据包含在应答中,GICB 只需二级以上应答机即可支持,该协议需要地面发起按照一定周期对目标询问,以及时获取相应的BDS寄存器数据。Dataflash 依赖于飞机系统,按照已经确定的规则在监视询问对应的应答中发布应答机寄存器更新的消息。因此,雷达不需要进行定期询问,就可以检查飞机参数的状态。但是,由于二级应答机的最低性能标准中并不包含Dataflash 功能,它需要更高等级的应答机才能支持,所以目前S 模式二次雷达普遍采用的GICB录取BDS 数据。本雷达实现了S 模式数据链的标准长度和扩展长度通信,支持1-5 级应答机通信,可实时获取飞行器应答机寄存器数据,通过内置的GICB 支持S 模式基本监视能力和增强监视能力,可完成表1 信息的录取。
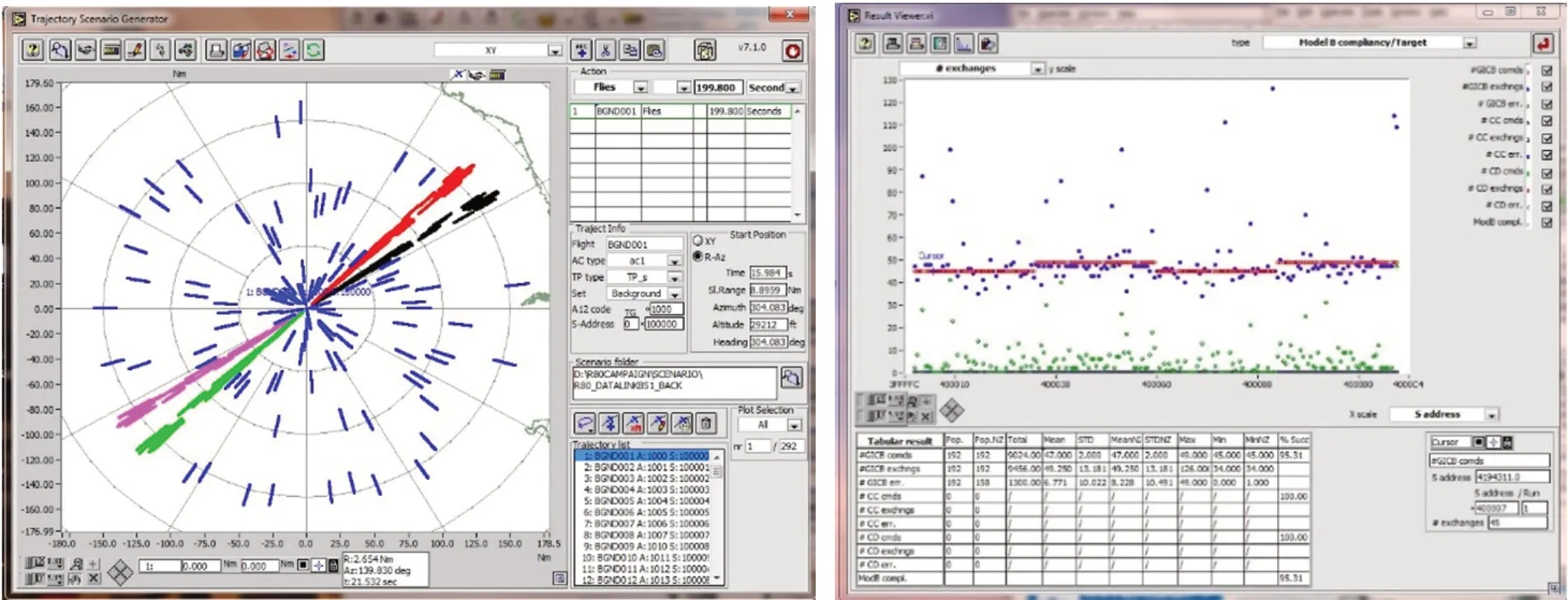
图5:场景一RASS 测试结果

图6:场景二RASS 测试结果

图7:青岛询问模式配置
3.3 基于ADS-B的盲区航迹跟踪和校准
目前国内外二次雷达基本采用的水平机械扫描的大垂直口径阵列天线,其不可避免的具有40 度左右的顶空盲区,这导致飞越雷达上空的飞行目标在盲区内航迹中断,二次雷达可通过天线控制通道全向波束接收应答机的发出的1090ES 自相关广播(ADS-B)信号,获取目标的位置信息。当飞行器进入顶空盲区时,通过ADS-B 数据进行航迹拟合,对目标进行持续跟踪直到目标飞出雷达盲区。
传统的二次雷达校准一般通过应答机或者专门的标校位置来给校准雷达方位,本雷达通过接收同飞行器的ADS-B 位置信息和相同飞行器雷达航迹进行比对,统计方位误差对雷达方位进行修正。
4 S模式性能测试和应用
4.1 增强监视性能测试
SCR-22SS 雷达采用IE(Intersoft electronics)公司的RASS-S系统来验证和评估S 模式录取能力,测试场景采用殴控S 模式雷达功能规范中定义的数据链模型B 的场景一和场景二。
4.1.1 测试场景一
如表1 所示,总共4 个3.5 度扇区,每个扇区分布48 个目标,每个目标录取一个寄存器,录取成功率>95%,实际测试结果:95.31%。如图5 所示。
4.1.2 测试场景二
如表2 所示,总共4 个扇区,每个扇区分布24 个目标,每个目标完成2 个寄存器录取,录取成功率>95%,实际测试结果:95.92%。如图6 所示。

表2:测试场景一目标分布

表3:测试场景二目标分布

表4:增强监视录取配置

图8:雷达现场及航迹(2020/2/5)
4.2 现场应用
本雷达在青岛新机场已成功应用S 模式增强监视功能,并接入了自动化系统。青岛新机场二次雷达有效覆盖范围设置为370KM, 全呼周期2.6ms,选呼周期5.4ms,全呼询问频率= 1/(2.6ms+5.4ms)=125Hz,其中全呼周期采用UF11+短P4A/C 模式。如图7 所示。
其中增强监视模式录取寄存器配置如表4。
图8 为2020年2月5 日7 时青岛现场航迹图,图中右侧为地址79A03C 的飞机基本监视和增强监视实时录取的寄存器。
5 总结
在本项目研制中首次将基于通用服务器的软件化雷达技术应用在二次雷达产品中,在单个服务器内基于Linux 系统采用标准C 语言实现了雷达信号处理、监视数据处理以及选址通信、数据链路管理以及地面接口控制等通信功能,是目前首个采用全软件化技术的S 模式二次雷达。本雷达实现了S 模式基本监视、增强监视以及S模式数据链等全S 模式功能,达到国际主流空管雷达技术水平。本雷达自项目验收以来已在民航多个机场获得应用,得到了用户高度认可,为民航重大监视装备国产化奠定了坚实基础。
猜你喜欢
航天器工程(2021年2期)2021-04-28
青年歌声(2019年12期)2019-12-17
百科探秘·航空航天(2018年11期)2018-11-29
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
北京航空航天大学学报(2017年7期)2017-11-24
电子制作(2017年23期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16
