美国“奥西里斯”探测器完成贝努小行星表面采样
2020-02-04 07:39张扬眉北京空间科技信息研究所
国际太空 2020年12期
张扬眉(北京空间科技信息研究所)

美国东部时间2020 年10 月20 日18:12(北京时间2020 年10 月21 日06:12),美国“奥西里斯-雷克斯”(OSIRIS-REx,以下简称“奥西里斯”)小行星探测器以“一触即离”方式接触101955 贝努(101955 Bennu)碳质小行星(以下简称“贝努小行星”)表面,停留数秒后,按预定计划飞离小行星,标志着“奥西里斯”完成了贝努小行星的首次采样。这是美国首个小行星采样返回探测器,将带回继“阿波罗”(Apollo)载人登月任务之后最多的样品。这也是首项研究原始B 型小行星的任务,这类小行星富含构建生命的要素—碳和有机分子,对研究太阳系的形成和演化、行星形成的初始阶段以及形成生命的有机复合物的起源等具有重要意义。
1 飞行过程
发射、巡航和抵达
2016 年9 月8 日,美国国家航空航天局(NASA)用宇宙神-5-441(Atlas-5-441)运载火箭从卡纳维拉尔角成功发射“奥西里斯”探测器。“奥西里斯”是美国首个小行星采样返回探测器,将对贝努小行星进行探测,并将于2023 年把该小行星的样品送回地球。
“奥西里斯”探测器发射1 年后,进行了地球借力飞行,之后又经过1 年,于2018 年12 月31 日成功进入贝努小行星轨道。之后,“奥西里斯”在距离贝努面向太阳的表面19km 处对其进行了初步探测。探测器数次飞越了小行星的北极、赤道和南极区域,之后与小行星表面的距离缩短为7km 左右。“奥西里斯”的初步探测目的是评估贝努的质量和旋转速率,生成该小行星更为精确的形状模型。该数据有助于之后确定采样的潜在地点。该任务的导航团队也利用初步探测的数据,对环绕小行星的精确导航进行了演练。
“接近运行”
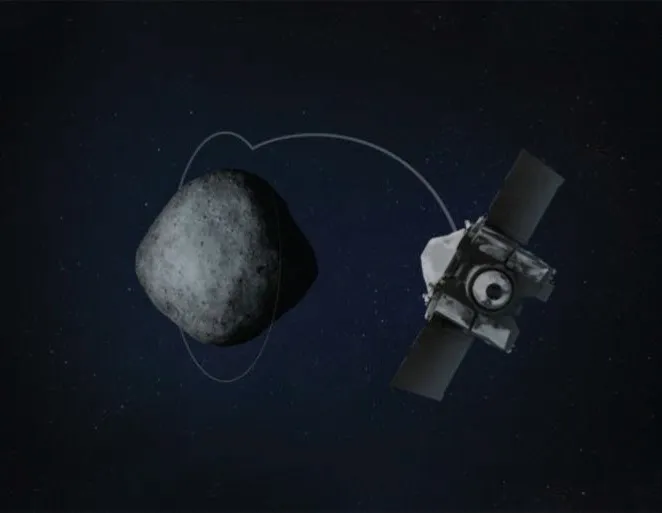
“奥西里斯”入轨示意图

“奥西里斯”获取的贝努小行星图像
抵达贝努小行星后,“奥西里斯”进入“接近运行”(Prox-Ops)阶段,该阶段的最终目标是选择安全且可以采集到高科学价值的样品地点。
“接近运行”又包括以下5 个主要的小阶段。
●初步探测阶段:搜寻小行星的羽流和天然卫星,这些可能对航天器形成威胁。
●轨道A 阶段:科学团队利用贝努小行星表面的图像,从基于恒星的导航转向基于地标的导航;科学团队收集来自航天器仪器的有关贝努小行星的数据和图像,协助其在绕小行星轨道上的导航。
●详细探测阶段:利用科学仪器绘制贝努小行星的地图,确定其全球光谱、热和地质特性。这对于为探测器选择着陆地点来说非常重要。在详细探测的最后,选出12 个可能的采样地点。科学团队还将开始测量贝努小行星的运行轨道是如何受到其表面冷热程度的影响,即“雅科夫斯基效应”。
●轨道B 阶段:以更高的分辨率绘制贝努小行星的地图,从12 个候选的采样地点中选出2 个采样地点。激光高度计也将收集数据以绘制高可信度的贝努小行星地形图。
●勘察阶段:探测器近距离对可能的采样地点进行一系列飞越活动,从而对候选采样地点的安全情况、样品物质的存在情况以及科学价值等进行评估。完成“勘察”之后,将选出最终的一个采样地点,然后开始进行演练活动。
2019 年12 月12 日,NASA 宣布选择“夜莺”(Nightingale)作为主要采样地点,“鱼鹰”作为备选采样点。上述两个采样点都位于环形山内,其中“夜莺”靠近贝努小行星的北极,而“鱼鹰”则靠近赤道。
着陆和采样
美国东部时间2020 年10 月20 日13:50,“奥西里斯”探测器推力器点火,脱离绕贝努小行星飞行的轨道。探测器展开采样臂,向贝努小行星表面方向降落。大约4h 后,探测器到达距离贝努小行星表面约125m 处,进行了“检查点”点火,使得探测器向“夜莺”着陆点准确靠近。10min 后,探测器再次进行点火,此次点火被称为“匹配点”点火,使得探测器降落速度放缓,以在接触小行星表面的时刻能够适应小行星的自转转速。随后的11min,探测器绕过了小行星表面一个被称为“末日山”(Mount Doom)的两层楼高的巨石,之后接触到贝努北半球的一个陨石坑中的一块平整表面,即“夜莺”着陆区域。“夜莺”区域约为一个小型停车场大小,该区域是遍布岩石的贝努小行星上为数不多的相对平整和干净的区域。
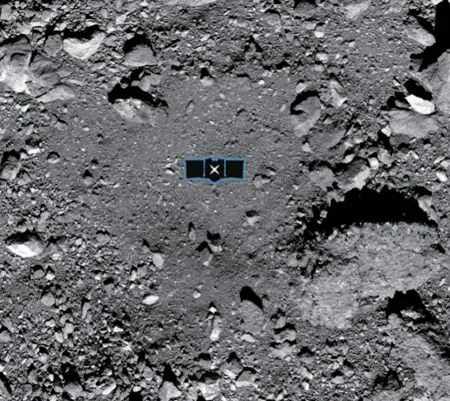
“夜莺”着陆点图像(为显示出该区域大小,加上了探测器示意标志)

“奥西里斯”探测器样品返回舱
探测器接近该地点后并不着陆,而是延伸出一个“一触即离”(TAGSAM)采样机构进行采样。采样机构喷射出氮气,使小行星表面的岩石和尘埃被激起并被吹入位于其铰链式机械臂末端的采样头中。当采样收集器接触小行星表面时,“一触即离”采样机构外部的表面接触板也将收集微粒物质。样品被存储在样品返回舱(SRC)中的容器内。
“一触即离”采样机构有3 个独立的气体瓶,可以进行3 次采样尝试。尽管这是一项新技术,但是对其采样头进行的真空和微重力实验证明其具有采集60g 样品的能力。“一触即离”采样机构由洛马公司研制。
样品返回舱是一个带有热防护罩和降落伞的气动外壳设计的容器。当采集到小行星样品后,TAGSAM 机械臂将采样头放进样品返回舱。在任务结束时,装有采样头和小行星样品的样品返回舱是唯一返回地球的组件。洛马公司在继承“星尘”(Stardust)彗星采样返回器设计的基础上,研制出“奥西里斯”的样品返回舱。
10 月23 日,项目团队表示由于“一触即离”采样机构收集的物质过多,用于将样品密封到位的聚酯薄膜瓣被数块大石块揳开,导致样品泄漏,泄漏过程被航天器拍摄下来。之后,NASA 决定加快将采样机构头部装入样品返回舱的过程,略去对样品进行称重的过程。目前采集的样品远高于目标的60g,头部图像显示至少有400g 样品,而这些图像仅观测到了采样机构头部体积的17%,项目团队预估样品质量超过1kg。团队还在分析采样过程中和采样后拍摄的图像,以更好地了解小行星的表面,从目前的分析看,贝努小行星表面土壤非常疏松。在成功完成样品的存储之后,“奥西里斯”任务后续的重点为将样品返回地球。
返回地球
探测器将于2021 年3 月开始返回地球的旅程。在探测器接近地球时,将进行最后的路程修正机动,释放返回舱在美国犹他州测试与训练靶场(UTTR)着陆。样品返回舱将以12.2km/s 的速度进入地球大气,其采用与之前的“阿波罗”返回舱和“星尘”返回舱相似的耐烧蚀防热罩,通过降落伞系统进行减速,最后软着陆。着陆后,样品返回舱将被送往位于约翰逊航天中心的天体学物质获取与管理办公室进行存储和样品检查。
2 任务特点
“奥西里斯”是美国首次、全球第三次小行星采样返回任务,此前的两次小行星采样返回任务是由日本实施的隼鸟-1 和2(Hayabusa-1 和2)。
迄今全球仅有美国和日本实施过小行星探测任务,美国在“奥西里斯”之前实施过3 次小行星探测任务,分别是“近地小行星交会-舒梅 克”(NEAR-shoemaker)、 深 空-1(Deep Space-1)和“黎明”(Dawn)任务,其中“近地小行星交会-舒梅克”任务首次实现了小行星软着陆,但属于临时安排的软着陆尝试,并不是计划实施。此次“奥西里斯”任务并不进行小行星软着陆,而采用“一触即离”采样机构,通过发射氮气激起样品,用采样头收集被激起的样品,这与日本“隼鸟”任务采用的采样方式有相似之处。隼鸟-1 采用一个喇叭状的采样工具,先通过子弹对小行星表面进行轰击,再用喇叭状采样工具收集碰撞产生的小行星碎片;隼鸟-2 则采用装有小型炸药盒的撞击装置在小行星上制造撞击坑,隼鸟-2 下降并接触到新形成的撞击坑表面,利用样品采集装置尽快采集撞击坑内的物质,并装入样品采集装置内。
3 “奥西里斯”取得的科学发现
2018 年12 月11 日,NASA 宣布“奥西里斯”在飞向贝努的途中,发现贝努小行星上存在水的痕迹,这些水分被“锁”在贝努小行星的粘土中。初步分析显示,贝努小行星存在含氢氧基的分子,其中氢氧基由氢原子和氧原子相连组成。整个小行星的含水粘土材料中都存在氢氧基团,这意味着贝努的岩体曾在某个时间点上与水发生过反应。研究人员表示,贝努体积太小,不足以容纳液态水,因此这意味着贝努曾经的母体—一个体积更大的小行星—曾在某个时间存在液态水。
2020 年9 月21 日,NASA 宣布,根据“奥西里斯”获取的数据,在贝努小行星的南半球和赤道附近发现了6 块尺寸在1.5 ~4.3m 的石块,这些石块较为明亮,与灶神星(Vesta)上的物质相匹配,因此,贝努小行星上可能有灶神星的碎片。这对于研究小行星的运行轨道及起源等具有重要意义。根据假设,贝努小行星可能是其母体小行星与灶神星碎片发生剧烈碰撞之后产生的碎片聚合而成的。
4 总结与思考
小行星探测已成为主要航天国家深空探索领域的重点发展目标之一
各航天国家对小行星的探测极为重视,美国、日本、俄罗斯等国家未来空间探索计划中都涵盖了小行星探测计划。太阳系内小行星众多,这些小行星中蕴含很多能够回答太阳系起源和演化等重要问题的线索,因此探测小行星的科学意义巨大。
近地小行星具有特别的探索价值,国外非常重视对其研究与利用
大量的证据表明,近地小行星富含各种金属、水以及其他原材料,具有潜在的开发利用价值,而且到达这些近地小行星需要的任务成本相对较低。此外,近地小行星具有较大的轨道范围,可作为向其他天体进军的中转平台和研究太阳系的平台。而另外一个重视近地小行星的原因是,近地小行星可能与地球发生碰撞,对人类生存和发展具有潜在危害和致命后果。因此,开展近地小行星探测,研究其轨道变化机制和威胁预警方法,具有重要意义。
小行星探测任务需要结合天体运行轨道,选择合适的时机进行
美国“新视野”(New Horizons)探测器利用了250 年才会出现一次的有利窗口对太阳系外层空间的柯伊柏带(Kuiper Belt)小天体开展探测。每一个任务都有相对固定的发射机会,这些机会都是由所选定目标的特有运行规律决定的,探测目标的相对几何关系、大天体借力飞行等都是可以利用的有利条件。
相比大天体探测器而言,小行星探测器对自主导航能力要求更高
与其他深空探测活动一样,小行星探测也需要长距离的飞行,小行星探测的任务周期一般也较长,而且相比大天体而言,对小行星探测器的自主导航能力要求更高。例如,美国在深空-1 任务中,率先引入了通过对天体进行光学成像以完成自主导航的模式,并且取得了成功,促进了整个深空探测自主导航技术的发展。而长距离的飞行也对探测器自主能力提出了更高的要求,例如,飞往冥王星的“新视野”探测器一年才对地通信50 天左右,这些都使得小行星探测器必须具备更强的导航自主控制和运行管理能力。
小行星探测多采取多任务、多目标的方式进行
从国外已发射的小行星探测任务的飞行经历看,小行星探测多采取多任务、多目标的方式进行。例如,美国“近地小行星交会-舒梅克”,在飞向“爱神”(Eros)近地小行星途中,也对“梅西尔德”(Mathilde)小行星进行了探测。此后的深空-1、“新视野”以及“黎明”探测器也是多目标探测的任务。
小行星探测器更注重功能集成和多功能复用技术
一般小行星探测器的质量都不大,由于探测器资源非常有限,因此更需要探测器上分系统与设备的小型化和多功能集成。例如,深空-1 携带的“小型综合相机光谱仪”(MICAS)既为探测器提供导航信息,也作为有效载荷获取小行星图片。因此,小行星探测器的设计对传统航天器设计思想而言,带来了全新的挑战。
猜你喜欢
今日农业(2022年2期)2022-11-16
军事文摘(2022年12期)2022-07-13
新长征·党建版(2021年11期)2021-11-12
军民两用技术与产品(2021年10期)2021-03-16
学苑创造·A版(2020年10期)2020-11-06
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小哥白尼·趣味科学画报(2019年12期)2019-02-28
小学科学(2019年12期)2019-01-06
科普童话·百科探秘(2014年1期)2014-01-13