基于软件无线电的调频连续波雷达实现
2020-02-02 03:25唐晗呈杨涛
电子技术与软件工程 2020年17期
唐晗呈 杨涛
(电子科技大学 四川省成都市 611731)
为了克服开发传统体制雷达的种种限制,开发多功能、高性能、小尺寸以及低成本应用的雷达,软件无线电[1][2]的设计方法被引入到雷达系统设计中。在这样的雷达系统中,诸如波形产生、滤波、上下变频等信号处理过程均由可高度定制化的软件来实现[3][4]。这使得软件无线电雷达拥有很多优势,例如实现多功能雷达、复用硬件的能力、信号处理算法的快速实现、更快的开发周期以及相对低的成本。调频连续波(FMCW)雷达是一种使用连续波信号,能以较低的峰值功率实现远距离高精度探测,同脉冲体制雷达相比,FMCW 雷达对中频采样率要求较低,能使用更高分辨率的模数转换器实现较大的动态范围。本文拟采用基于ZYNQ 和AD9361 的软件无线电平台,实现并验证一个FMCW 雷达的原型系统。
1 调频连续波雷达概述
1.1 测距原理
FMCW 雷达是使用频率调制来实现距离测量的一种连续波雷达,通过多普勒分析则能测量目标的径向速度。本文只关注使用线性调频信号的FMCW 雷达,线性调频信号在时域中表示为下式:

式中Atx表示发送信号的幅度,f0表示初始频率,T 表示一个发送脉冲的周期,B 表示调频信号的带宽。当雷达发射信号后,经过目标物体的反射再被雷达接收到的回波信号相当于发送信号经过了相应延时与幅度衰减后的副本。
接收信号强度一般非常微弱,需要经过射频低噪放的预放大,再与发射端参考信号进行混频,得到包含目标距离信息的中频信号。对于线性调频信号来说,时延与回波信号的频移成线性对应关系,而中频信号的频率为参考信号和接收信号频率之差,因此通过分析中频信号的频谱可以得到目标的距离信息。具体来说,假设目标距离为D,中频信号频率为fIF,则有如下关系式:

FMCW 雷达能分辨出两个目标相对距离的最小值即距离分辨率可由下式表示:

而最大不模糊距离即最远探测距离可由下式表示:

当然,雷达系统实际上的最远探测距离更多取决于发射功率和系统的信噪比。
1.2 测速原理
如果目标相对于雷达有径向速度,则中频信号将会受到多普勒频移效应的影响,但是进一步的计算表明在单个线性调频脉冲的情况下,速度引起的多普勒频移和距离引起的差频二者深度耦合共同合成了中频频率,从而无法区分。本文使用快速调频脉冲序列信号,这是由N 个上述线性调频信号首尾相连组成的调频序列串,单个脉冲持续时间内进行的处理称之为快时间维,以脉冲计数n 为基准则称之为慢时间维。如果在快时间维对中频信号进行频谱分析则可得到距离差频fR,在慢时间维处理则可得到速度多普勒频移fd:

一般情况下fR远小于fd,因此可直接对中频序列进行二维FFT处理同时得到目标的速度和距离信息,处理过程如图1所示。调频序列二维FFT 的方法具有多目标同步处理能力,且运算速度快,在实际中广泛采用这种方法[5]。
在一般情况下,fR将远远小于调频信号的射频带宽B,因此可以用一个较低的采样率对中频信号进行采样,这样就能使用具有更高位数的数据转换器从而为雷达提供更大的动态范围,这也是FMCW 雷达能实现低成本的重要原因。
2 设计实现
2.1 软件无线电平台架构
软件无线电系统一般由通用射频前端模块、数字信号处理模块以及上位机可定制软件模块组成,如图2所示。射频前端部分由发射和接收天线、滤波器、低噪放、射频功放和混频器等模拟部件组成,数字信号处理模块一般由FPGA 数字逻辑或者DSP 处理器实现。来自数字基带的信号首先经过数据转换器变换到模拟域,再通过I/Q 调制解调将频谱搬移到射频中心频率处,最后通过通用射频前端模块完成无线电信号的发射和接收。
在采用软件无线电体系的FMCW 雷达中,中频信号可以在基带数字域中通过对发送参考信号和接收信号进行共轭复数乘法来得到,这种方法意味着需要直接完成零中频信号的采样,因此射频信号的带宽受限于数据转换器的采样率,但好处是省去了复杂的射频前端设计,有利于雷达原型系统的快速实现。
2.2 雷达系统实现方案

图1:二维FFT

图2:软件无线电一般架构

图3:雷达信号处理框图
射频前端采用ADI 公司的宽带射频收发芯片AD9361,该器件集成了射频前端、I/Q 调制解调、数据转换器等模块,完成从射频信号和基带数据之间互相转换的过程,AD9361 能在70MHz 到6GHz 频率范围内提供最大56MHz 的模拟带宽以及61.44MSps 采样率,内部集成两路独立的收发通道,值得注意的是这些通道的本地振荡器共用同一个参考时钟,这使得通道之间具备相干性。基带数据将通过LVDS 数字接口传输到Xilinx 的Zynq 系列SoC 芯片,这款芯片上集成了ARM 硬核和FPGA 逻辑资源,二者通过内部高速总线互联,能灵活实现各种算法[6]。本文使用基于Zynq7020 的Zedboard 开发板作为基带处理母板,基于AD9361 的FMCOMMS3开发板作为射频前端子板,二者通过FMC 接口连接实现高速数据传输。
由于AD9361 能够提供高达56MHz 的模拟带宽,并且Zynq 具有大量FPGA 逻辑资源能够进行高速数据处理,因此雷达系统中所有信号处理都将在软件无线电平台上通过FPGA 逻辑资源和上位机软件完成。

图4:外场测试场景
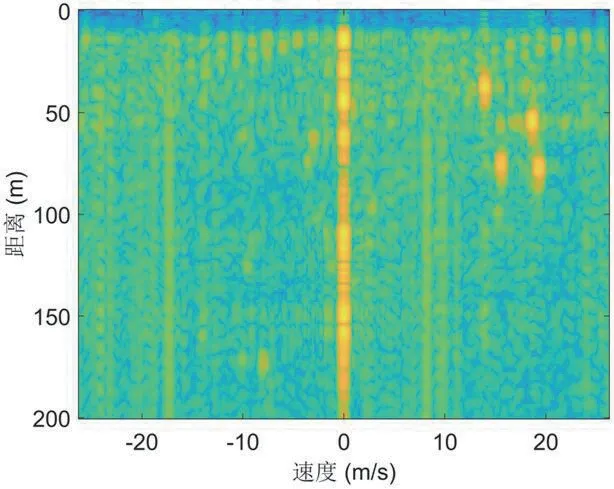
图5:距离多普勒成像
在本文中数字信号处理模块承担了波形生成、高速信号处理和与上位机的数据传输,如图3所示。数字基带的调频连续波信号由FPGA 可编程逻辑实现,首先实现了数字控制振荡器(NCO),由于系统时钟频率较高,且需要输出正交复数信号,因此NCO 是基于最简单有效的查找表实现的,再通过计数器实现的斜坡发生器来控制NCO 频率控制字端口从而实现线性调频基带信号发生器。
射频前端模块接收到发送信号经过目标反射形成的回波,而回波是发送信号的经过时延、多普勒频移和幅度衰减后的副本。在经过低噪放、I/Q 解调和模拟数字转换后回波变换到基带数字域。基带回波信号与发送线性调频信号的复共轭复乘实现混频,也可称之为调频脉冲的解斜。由于基带处理的都是复数信号,因此经过复乘后的中频信号不包括多余的转换产物,能够直接用于后续距离估计等处理。但是61.44MSps 采样率产生的数据吞吐量还是太大,不能够直接通过以太网传输到上位机做后续处理。因此,复乘后的中频信号首先通过一级五阶CIC 抽取滤波器,再经过一级FIR 抽取滤波器,采样率总共降低100 倍。包括复乘和抽取滤波等高速信号处理模块都是由FPGA 数字逻辑实现。最后经过降采样后的中频信号数据流通过千兆以太网模块传输到上位机以供后续处理。
上位机的信号处理软件首先消除收发天线的之间泄露信号的影响,然后通过二维FFT 成像处理得到距离-多普勒图像。泄露信号会在对应于收发天线距离的位置处产生一个强烈的峰值,通过设计FIR 滤波器将其零点置于该峰值处从而消除泄露影响。接下来将数据按照每列为一个调频脉冲的长度重新排列成二维矩阵的数据形式,对该数据矩阵进行2 维FFT 计算,最终生成距离-多普勒图像。
3 实测结果
为了验证整个系统的有效性,在室外进行了实际测试,实验均是在ISM 频段功率允许范围内进行的。雷达被放置在一个繁忙道路边,实验目标是探测到道路上的行驶汽车目标,实验场景如图4所示。雷达中心频率设置为5.8GHz,调频带宽为56MHz,调频序列脉冲频率为2kHz。为了减少AD9361 芯片内部串扰带来的影响,并增加探测距离,在发射端口和天线之间连接了一个外部功率放大器,收发天线使用了一对工作频率为5.8GHz 的小型平板定向天线。
图5 是上位机对实测数据的距离多普勒成像结果,来自行驶汽车的雷达回波在经过上位机二维FFT 处理后能够在对应的距离速度处清晰成像。从图中可以看出在100 米范围内有四辆速度不同汽车正通过,同时也能看出在速度为零处有大量的峰值,这是由路边静止车辆和道路周边大量建筑物的反射造成的。
4 结论
本文的实测展示了该系统对运动目标的有效探测能力。基于软件无线电的高度灵活性,可以在不更改硬件的情况下快速部署新的信号处理算法,因此对于算法以及原型机开发验证来说软件无线电是一个很好的选择。然而由于采样率的限制,调频带宽无法进一步增大,因此雷达的距离分辨率受到限制,雷达发射信号的本地泄露限制了动态范围,影响了远处微弱目标的探测。这些问题和实现软件无线电雷达的实时信号处理能力是作者的下一步研究目标。
猜你喜欢
能源工程(2021年5期)2021-11-20
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
数字通信世界(2015年5期)2015-04-04
集美大学学报(自然科学版)(2015年4期)2015-02-28
海军航空大学学报(2015年4期)2015-02-27