AUTBUS总线介绍及智慧灯杆系统中的应用
2020-02-02 03:24苏盘社薛兆井
电子技术与软件工程 2020年17期
苏盘社 薛兆井
(北京东土军悦科技有限公司 北京市 100041)
1 引言
目前我国工业控制系统普遍采用两大类型的现场总线;一种是以CAN[3]总线,PROFIBUS 总线、HART 总线等为代表的现场控制总线,采用总线型的拓扑结构,支持多节点共享总线,传输速率低,但可支持长距离传输;另一种为现场工业以太网总线[4],主要采用星形拓扑,最大传输速率为100Mbps,传输距离100m,另外,为了防止碰撞,需要使用交换机增加网络的接入节点数。智能制造是现代制造业信息化发展的新阶段,要求现场控制总线需要满足长距离,宽带传输,高实时,多节点传输等需求,以上的两种工业总线都不能满足,我们介绍一种现场高速控制总线,即AUTBUS 总线,采用了正交频分(OFDM)高带宽传输技术作为高速控制总线的物理层技术,实现了长距离,高速率总线传输。
2 AUTBUS总线概述
AUTBUS 总线是基于OFDM 调制的主要适用于控制节点和多用户节点网络通信环境的宽带有线接入系统。网络结构由控制节点和用户节点构成,控制节点和用户节点通过一对差分线连接构成一个网络。控制节点和用户节点及用户节点之间可以直接通信,控制节点对整个网络通信进行控制,完成网络配置和初始化,以及对物理层信道进行调度。同时控制节点还完成AUTBUS 控制总线网络与外界的通信。

图1:AUTBUS 网络结构
一个高速控制总线网络中通常只有一个控制节点。在可靠性要求高的应用场景,也可以有两个控制节点互为备份,但同时只有一个控制节点工作。网络拓扑如图1所示。
其中TN 为控制节点,MN 为控制节点,虚线框为备份的控制节点。
高速控制总线发射和接收系统的物理层过程如图2所示。在发射过程中,数据流分别经过加扰、RS 编码、卷积编码后进行数据交织,再通过QAM 调制后形成OFDM 信号,根据不同的发射模式将数据组合成帧后在电缆线上发射出去。接收系统是发射系统的逆过程,用以从线路编码信号中将数据流准确的解码、还原出来。
AUTBUS 控制总线数据带宽:100Mbps/500 米;最小循环周期:8us;支持节点数254 个;传输误码率:≤10e-11;总线时钟精度:10ns。
3 AUTBUS总线原理

图2:物理层处理过程
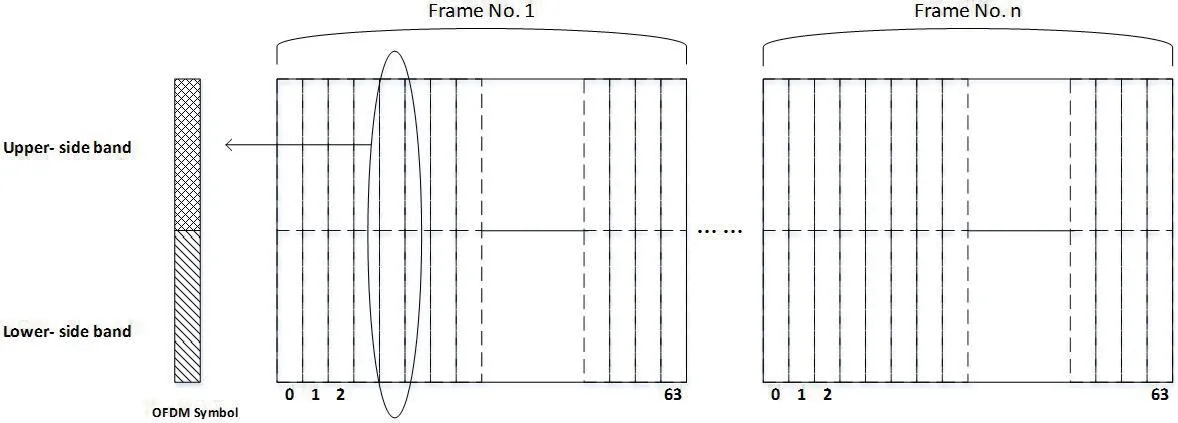
图3:帧格式设计

图4:时频资源分配
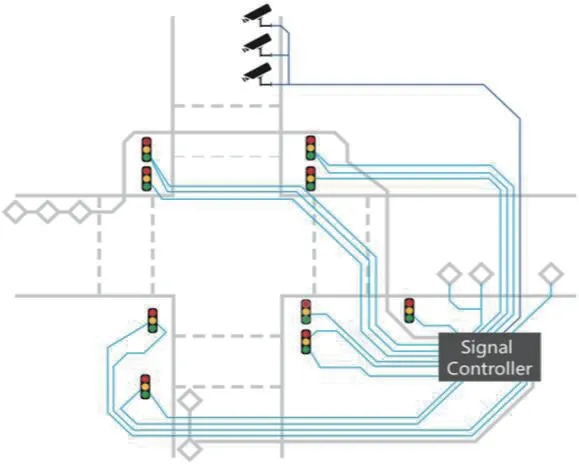
图5:智慧灯杆系统的传统组网方式

图6:智慧灯杆系统的AUTBUS 组网方式
AUTBUS 控制总线系统采用了基于OFDM 技术的设计,可同时支持时分复用和频分复用的工作模式。物理层信号的基本单元是OFDM 符号,64 个OFDM 符号组成一个信号帧。其中每个OFDM符号又在频域子载波上平均分为上边带和下边带两部分,其中高频率子载波部分(16.896-32.256MHz)称为上边带,低频率子载波部分(1.536-16.896MHz)称为下边带,在AUTBUS 分配通道资源时,上、下边带可以分配给不同的设备节点。帧格式如图3所示。
AUTBUS 信号帧如图4所示,可分解的元素有:帧导频信号,下行子帧,可分配资源等,其中:帧导频信号用以识别一个信号帧的开始,具有信号帧同步和帧头定位的功能。帧导频信号固定在每帧的第1,2 个OFDM 符号的下边带部分。
下行子帧用于从控制节点发往各终端节点的数据和信息。可包括信道、带宽分配情况,系统维护信息,传输数据等多个内容。下行子帧可包含≥2 个OFDM 符号的下边带部分。
可分配资源最小单位为2 个OFDM 符号的半边带,在图4 中所有空白部分均为系统可分配资源,控制节点和各终端节点均可根据需求申请对应资源并用来传输相关数据。
4 AUTBUS总线在智慧灯杆系统的应用
智慧灯杆作为智慧城市的基础设施,是智慧城市的重要“入口”。可集成照明、信号灯、音视频监控设备、并依托强大的综合管理平台,实现智慧照明、智慧安防等诸多应用。
在智慧灯杆系统的传统组网方式如图5,所有信号灯和摄像头设备都需要通过以太网交换机连接到信号控制器上,网络拓扑为星形连接,布线复杂,设备成本高。
在智慧灯杆系统使用AUTBUS 控制总线组网方式如图6,所有信号灯和摄像头设备通过单对双绞线以总线方式连接到信号控制器上,每个信号灯传输速率约为1Kbps,通常摄像头传输速率为5Mbps,一个路口通信距离约300 米,因此一个AUTBUS 控制总线单网段就可完成一个路口智慧灯杆系统的组网,极大地简化交通控制现场的网络架构,有效降低工程施工及维护成本。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
照明工程学报(2021年2期)2021-05-10
中国交通信息化(2019年10期)2019-11-16
光源与照明(2019年4期)2019-05-20
电子测试(2017年11期)2017-12-15
黑龙江电力(2017年1期)2017-05-17
信息安全与通信保密(2016年5期)2016-02-28
发明与创新·大科技(2015年9期)2015-05-30
发明与创新(2015年33期)2015-02-27
电测与仪表(2014年8期)2014-04-04