
增量非线性动态逆在环量飞控技术中的应用
2020-01-21 09:36刘舒娜唐鹏
航空科学技术 2020年5期
刘舒娜 唐鹏
摘要:针对环量控制无舵面飞行器的特征,对增量动态逆控制方法在环量控制飞行器上的应用进行了研究。首先介绍了环量控制技术,并建立了其执行机构简化模型,其次在环量控制飞行器动力学的基础上设计了增量非线性动态逆控制律。针对无舵面飞行器控制效果受外部流动条件变化影响较大的情况,在飞行器中参数摄动下进行仿真,结果表明增量非线性动态逆控制律相对于PID控制律具有良好的鲁棒性,证明了增量非线性动态逆控制方法在环量控制飞行器上应用的可行性。
关键词:环量控制;增量非线性动态逆;飞行器动力学;参数摄动
中图分类号:V249.1文献标识码:ADOI:10.19452/j.issn1007-5453.2020.05.003
在传统的飞行控制中,通常采用舵机带动气动舵面实现飞行器的飞行控制,其基本原理为:舵面的偏转改变飞行器的气动外形,使飞行器的流场发生变化,进而产生所需的气动力和力矩。为了满足飞行器的平衡、稳定、机动等操稳特性要求,通常需要操纵面具有较大的几何尺寸以产生足够的升力,同时又需要实现快速的操纵响应。这些均会带来飞行器重量(质量)的增加、阻力和舵机能耗增大等[1-2]。
射流控制技术是一种无操纵面飞行控制技术,主要包括环量控制(circulation control, CC)和射流推力矢量(fluidic thrust vectoring, FTV)等技术[3],与常规操纵舵面控制相比,无操纵面控制技术主要有如下优势:(1)传统舵面及相关控制机构的取消可减轻飞行器的结构重量;(2)减少飞行器散射源,提高隐身性能;(3)实现飞行器短距起降以及提高有效载荷。射流控制技术只需要通过控制喷射气流改变主氣流的状态,即可产生相应的力和力矩,这样不仅能够降低舵面和执行机构的代价,还可以避免舵机卡阻等各种故障模式的影响,目前在飞行控制领域的应用已成为研究热点,本文主要以环量控制技术为研究对象,验证增量非线性动态逆(incremental nonlinear dynamic inversion,INDI)控制律应用于无操纵面飞行器的优越性。
1环量控制技术及控制系统建模
2010年9月,由BAE系统公司(BAE Systems)与英国多所高校合作研制的“恶魔”(Demon)飞行器进行试飞,该飞行器没有依赖传统的副翼/襟翼等操纵舵面,利用射流控制完成了飞行器的升降和滚转控制,“恶魔”飞行器的试飞成功,对无舵面操控的研究具有重大意义[4-5]。
国内也进行了无舵面飞行控制技术的研究,通过仿真和试飞等手段分析了无舵面飞控控制技术的可行性,南京航空航天大学戴新喜[6]等搭建了无舵面试飞验证平台,验证了环量控制装置可有效替代舵面对飞行器飞行姿态进行操控,帮助飞行器实现完全无舵面飞行;中国航空研究院联合研发团队在虚拟舵面无人机的理论探索、数值分析、飞行试验验证等研究工作方面都取得显著突破。
环量控制基本原理为:机翼尾缘设置为圆弧形,并与翼面交界处设置有一定高度的气缝,机翼内部设置有气源装置从气缝切线方向喷射气流[7],根据科恩达(Coanda)效应,流体将其本来的流动方向,顺着机翼尾缘流动,可以增加环量以及机翼升力。图1为双射流孔环量控制器,在飞行器左右机翼对称布置,与单射流孔不同,双射流孔由圆柱体充当科恩达面,圆柱体由伺服机构驱动进行转动偏离对称轴,圆柱体维持总的射流面积不变,可以使射流由上下射流孔分别喷射,也可使上下射流孔完全关闭或打开,通过调节上下射流孔开度,就可以得到不同的操纵力和力矩。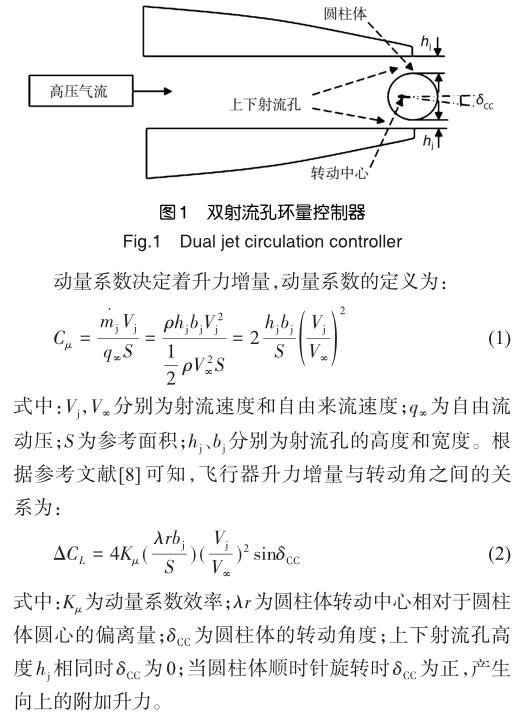
根据参考文献[9]、参考文献[10],建立环量控制系统框图,如图2所示,气动系统的瞬态由一阶模型控制,动态特征取决于管线的体积,可将其视为一阶惯性环节;射流控制执行器其伺服执行机构则由二阶模型描述;同时空气的行程及各部件的运行过程中也会导致延迟的产生,简化后的执行机构数学模型如图3所示。
简化模型中,二阶模型取ω=15rad/s,ζ=0.85,同时假设标准状态下一阶惯性环节T=5ms,延迟环节τ= 2(即延迟时长为两个单位采样时间)。
在环量控制技术的实际应用中,仍然存在着如下问题:
(1)有效性:必须产生足够大的机动力矩,以满足飞行任务的要求。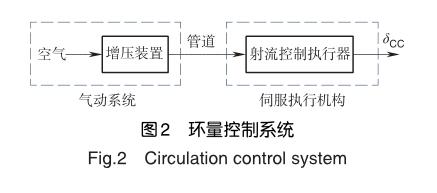
(2)对飞行环境的适应性:相对于传统铰链控制面,环量控制通常对局部流动条件比较敏感,因此需要根据飞行环境快速进行调节。
(3)线性度:流体机械耦合在流量控制装置中的本质意味着所得到的控制响应比传统铰链控制的非线性大得多。
现有的研究热点大多集中于圆弧后缘的气动特性优化以及如何合理设计供气系统减少能量损耗,本文将从控制律的角度出发,采用一种鲁棒性较好的非线性增量动态逆(INDI)控制算法,应用于无舵面飞行器控制,与传统PID控制方法进行对比,探索应用INDI控制方法解决无舵面飞行控制中不确定因素引起控制效能变化问题。
2 INDI控制算法的基本原理
在环量控制飞行器中,无人机的合外力矩M可分为两部分,一部分是飞行器气动力矩Ma,另一部分是飞行器环量控制执行机构作动时产生的力矩Mr,合外力矩的方程表示为:

以上推导过程可看出,INDI控制忽略气动力矩Ma的影响,降低了对气动模型精确度的要求,在每个控制时间内以计算出的增量dδCC作为控制输入,角加速度ω?0可实时反映飞行器当前状态特征作为反馈,增加了控制的鲁棒性。
[6]戴新喜.一种无舵飞行器飞行验证机的气动特性研究与试飞试验[D].南京:南京航空航天大学,2016. Dai Xinxi. Research on aerodynamic characteristics and flight test of flapless aerial vehicle[D]. Nanjing: Nanjing University ofAeronautics andAstronautics, 2016. (in Chinese)
[7]Nielson J N,Biggers J C. Recent progress in circulation control aerodynamics:AIAA-1987-0001[R]. Reston,VA:AIAA,2002:1-2.
[8]齊万涛,吕新波,伍智敏.环量控制技术在飞机纵向俯仰控制中的应用[J].飞行力学,2019,37(2):77-82. Qi Wantao, Lv Xinbo, Wu Zhimin. Application of circulation control technology on aircraft longitudinal pitch control[J]. Flight Dynamics, 2019,37(2):77-82.(in Chinese)
[9]Cameron R, Konstantinos K, Pranith C S,et al. Design and development of a control scheme for the UC2AV: Unmanned Circulation Control Aerial Vehicle[C]// 55th AIAA Aerospace Sciences Meeting, 2017.
[10]Buonanno A. Aerodynamic circulation control for flapless flight control of an Unmanned Air Vehile[D]. Cranfield,Bedfordshire:Cranfield University,2009.
[11]Smeur E J,Chu Q P,Croon G C D.Adaptive incremental non-linear dynamic inversion for attitude control of micro aerial vehicles [J].Journal of Guidance Control & Dynamics,2016,39(3):1-12.
(责任编辑王为)
作者简介
刘舒娜(1996-)女,硕士研究生。主要研究方向:无人机飞行控制。
Tel:16678484574E-mail:a1241031468@qq.com
Application of Incremental Nonlinear Dynamic Inversion in Circulation Control Technology
Liu Shuna*,Tang Peng
Beihang University,Beijing 100191,China
Abstract: In order to improve the circulation control flapless aircraft, the application of the incremental nonlinear dynamic inverse control method to the circulation control aircraft is studied. Firstly, the circulation control technology is introduced, and a simplified model of its actuators are established. Secondly, the incremental nonlinear dynamic inverse control law is derived based on the circulation control aircraft dynamics. Aimed at the situation that the control effect of the flapless aircraft is greatly affected by changes in external flow conditions, the simulation is performed under the parameter perturbation in the aircraft.The results showed that the incremental nonlinear dynamic inversion control law has better robustness compared to the PID control law, which proves the feasibility of the application of the incremental nonlinear dynamic inversion control method on a circulation control aircraft.
Key Words: circulation control; incremental nonlinear dynamic inversion; aircraft dynamics; parameter perturbation
