
速度计:一种新型的引力波探测器
2020-01-18 01:21陈奕康孙艳春
天文学进展 2019年4期
陈奕康,张 腾,孙艳春
(1.北京师范大学天文学系,北京100875;2.格拉斯哥大学物理与天文学学院,格拉斯哥G12 8QQ, 英国)
1 引 言
测量速度方法最先是由Braginsky 和Khalili[1]提出,用以替代传统的迈克耳孙干涉仪进行的位置测量。通过消除光子反作用力带来的波动,可大大提高引力波干涉仪在低频段的灵敏度。从原理上说,自由物体的速度与动量成正比,而动量是一个守恒量,因此是一个量子非破坏性量,那么通过设计就能够使得动量的测量不受反作用力的影响。当然,这里的动量守恒是整体的动量守恒,即是对于“镜子+光子”这样一个总的组合系统的动量守恒。尽管光子的运动与镜子的机械运动之间会因为耦合受到影响,测量速度仍然使得随机反作用力显著地减少。
在引力波干涉仪中,增加激光功率可以降低散粒噪声。但在光功率变高的同时,也会有更多的光子作用在反射镜上,从而产生更强的辐射压,导致更大的辐射压力噪声。在足够高的激光功率下,辐射压力噪声会比散粒噪声更大,并在噪声频谱中占比很高。
20 世纪60 年代Braginsky 第一次提出这个情况,并指出,能够计算出一个特定的激光功率,使散粒噪声与辐射压力噪声达到平衡的最低值[2,3]。这个值被称为标准量子极限(standard quantum limit, SQL),后来Khalili 和Levin[4]通过巧妙的设计绕过了这个极限,他称之为量子非破坏性(quantum nondemlition measurement, QND)方案。
事实上,美国的引力波激光干涉仪LIGO 最初设计时计划尽量靠近或者达到这个极限[5],而Buonanno 和Chen[6–8]提出通过改变干涉仪的动力学,在一定频段的范围内可越过这个标准量子极限。现在,LIGO 也提出一个方案,即使用2 个额外的光学滤波器来进行频率相关的零差检测[9]。无论使用何种方案,绕过标准量子极限目前看来都是建设第三代引力波激光干涉仪有待解决的一个问题。
本文的知识背景主要是基于现有的引力波激光干涉仪[10],在此基础上提出了一种新型的设计——速度计。其中,第2 章介绍了本文所用的一些最基本的原理和结论,包括位置测量与速度测量、激光的双光子形式以及迈克耳孙干涉仪的性能。第3 章则叙述了三种速度计的方案,包括之前用来测量地球自转的萨尼亚克干涉仪,最早提出速度测量的晃动式速度计以及最新的方案,由两个等效迈克耳孙干涉仪的模组成的EPR 型速度计。最后对全文进行总结,并对未来引力波激光干涉仪的发展进行了展望。
2 速度计原理简介
2.1 双光子形式
本节中,我们简单介绍量子光学中的双光子形式[11,12],这是一种被广泛应用的理论方法基础。一个准单色调制的光波,也就是激光,其可表示为:

其中,A和a是这个光波振幅的两个分量,下标c 表示非平稳变化,下标s 表示突变。A=代表直流分量,而则代表了交流分量。标准常量其中ω0是载波光频率,A是光束的有效横截面,c是光速。那么在频域中,我们有:

其中,Ω=ω −ω0。于是,光场可以拓展写为:

2.2 迈克耳孙干涉仪简介
迈克耳孙干涉仪是目前引力波激光干涉仪里最基础的结构[10],可以说,现有的其他升级型或替代型引力波激光干涉仪都是基于迈克耳孙干涉仪的原理。它在两臂上分别配有法布里-珀罗谐振腔,且使用了功率循环镜和信号循环镜使得灵敏度进一步提高。在无损耗情况下(TETM=0),我们分别给出迈克耳孙干涉仪耦合因子KMI和边带相移βMI的表达式:


其中,系数D由引力波源决定[13],而hSQL是标准量子极限,对于自由测试质量m,其可表示为:

在特定情况下,如ΦL0=π/2 时,式(8)可以进一步简化为:

由式(10)可以看出,量子噪声的两个分量非常明显地分离开来,括号内第1 项表示量子散粒噪声,第2 项则表示量子辐射压力噪声。我们可利用此式来推导标准量子极限,同时采用美国aLIGO 的参数,可得迈克耳孙干涉仪的量子噪声灵敏度曲线[14],见图1。
2.3 速度测量基本原理
首先,目前的引力波激光干涉仪的主要部分的研制是基于迈克耳孙干涉仪,并配以两个法布里-珀罗谐振腔以及功率循环镜等,通过干涉仪两臂臂长差的变化,反映出迈克耳孙干涉仪的相位差,以此判断是否有引力波信号。从理论上说,速度计干涉仪感知相位变化的能力应该与迈克耳孙干涉仪相同,即一个引力波信号在尺寸相同的迈克耳孙干涉仪与速度计干涉仪中产生的效果一样,它们的区别只在于噪声频谱的不同。
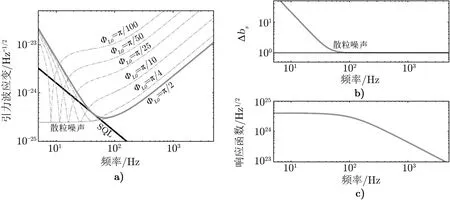
图1 迈克耳孙干涉仪的量子噪声[15]
以一个简单的结构举例,如图2 所示,透镜被同一束激光分别从它的正面和反面两次反射。在这个过程中,如果测试的镜子产生了位移∆x,那么整个光路就会产生光程差,相应的,探测到的激光的相位差的变化∆Φ与∆x会成正相关。于是我们称激光入射至镜子前表面到激光入射至后表面中间这一段时间为延迟时间τ,可以得到:

其中,是延迟时间τ内镜子运动的平均速度,而τ是实验设计中可以控制的已知量,也就意味与迈克耳孙干涉仪测量位置相比,速度计干涉仪中相位的变化反映了这段时间内反射镜速度的变化。
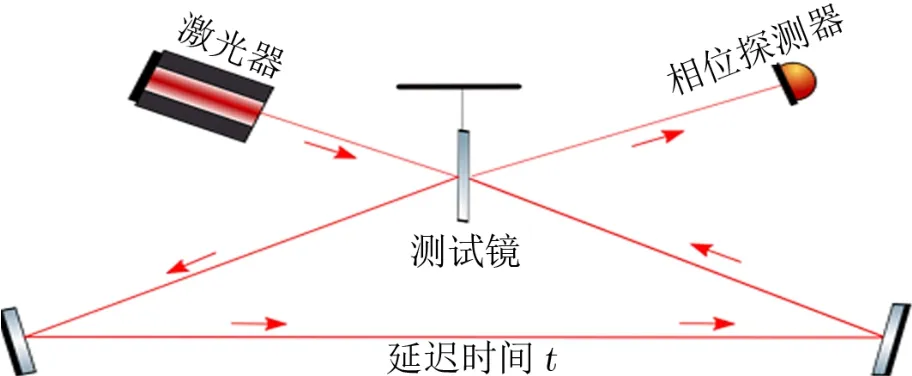
图2 速度测量的原理图
3 速度计干涉仪的基本结构
在速度计干涉仪的最初方案中,提出使用两个耦合的谐振腔:其中一个谐振腔拥有可移动的外壁,用于感知由引力波引起的振荡;另一个谐振腔则根据记录的位移信息进行相反的位移。按这样的顺序进行位置的测量,实际上也就是测量速度,这个方案我们称为晃动式速度计。在这之后,陆续有新型的速度计干涉仪被提出,到目前为止,所有方案大致分为三种类型:晃动式速度计、萨尼亚克速度计和EPR 型速度计。
在萨尼亚克速度计中,信号的边带会与干涉仪相互作用两次,并与载波光保持同调[15–17]。而在晃动式速度计中,用一个额外的非泵浦腔来记录干涉仪臂之间两个相互作用的信号边带,会产生一个新的晃动频率参数,它就如同萨尼亚克干涉仪中的响应函数[18–20]。最后是EPR 型速度计,它利用两个等效的迈克耳孙干涉仪的模,通过分束器将输出转换成和与差的形式,由此得到速度的信息[21]。下面将具体介绍几种不同速度计的基本结构。
3.1 萨尼亚克干涉仪
从拓扑学上来看,迈克耳孙拓扑也有一些可替代的拓扑,如萨尼亚克拓扑。1913 年,法国科学家萨尼亚克发明了以他名字命名的萨尼亚克干涉仪。它最初的目的是利用差分信号得到由旋转带来的影响[22],最经典的例子就是用它测量地球的自转,同时它也能够被用来测量引力波信号。与迈克耳孙干涉仪的原理相同,光同样是在分光计处一分为二,之后再合二为一产生干涉,不同的是,被分成两束的光中的每一束都会先后通过两条臂。尽管这两束光方向相反,经过顺序也相反,但当两束光汇聚时,就能得到描述臂长差的时变信号。
萨尼亚克干涉仪有两种常见的变体,如图3 和图4 所示。其中图3 是使用了光学延迟线(delay line, DL)的萨尼亚克干涉仪,图4 是使用了环形法布里-珀罗腔的FP(Fabry-Perot)萨尼亚克干涉仪。ITM (input test-mass mirror)是光输入的测试质量镜,ETM (end testmass mirror)是光截止的测试质量镜。与迈克耳孙干涉仪一样,这里也使用了功率循环镜(power-recycling mirror, PRM)和信号循环镜(signal-recycling mirror, SRM),它们能够进一步提高谐振腔内的功率和干涉仪的频率响应[23,24]。

图3 干涉仪臂上使用了延迟线的萨尼亚克干涉仪原理图[15]
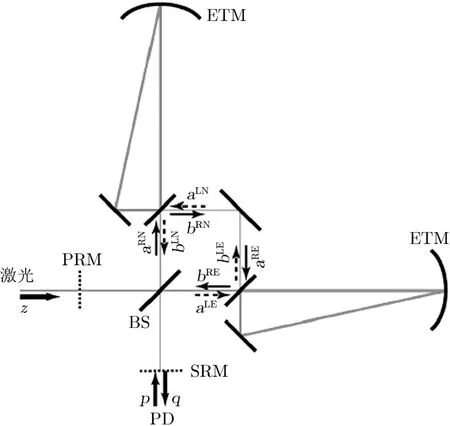
图4 使用环形腔延迟的萨尼亚克干涉仪原理图[15]
当光从激光器中发出并到达分束器前,会分成两束互相垂直的光束,它们以相反的顺序分别经过干涉仪的两臂,之后又在分束器处汇合。理想情况下,两束光的交流部分相互抵消,没有光进入出射口,此时的探测器应该是暗的。而两束光的直流部分则反射回入射口,至功率循环镜处又反射回主光路,继而提高了腔内的功率。我们用τarm表示延迟时间,即光在两臂间传播所用时间。通过截止端镜子的时变位移x(N,E),我们可以得到R 光束和L光束从入射口经过干涉仪的两个臂到达出射口后的相位,表示为:

出射口的输出与两束光的相位差成正比,由式(12)和(13)我们可以得到相位差,表示为:

由此看出,萨尼亚克干涉仪对测试质量镜的任何与时间无关的位移都不敏感,而辐射压力噪声是由于光子冲击镜面产生的,它与频率的平方成反比[10]。所以萨尼亚克干涉仪在一定程度上能很好地减少辐射压力噪声,它的耦合系数Ksagnac表示为[15]:

对DL 型萨尼亚克干涉仪,有:

对FP 型萨尼亚克干涉仪,有:
其中,IC是谐振腔内的循环功率,B是DL 型萨尼亚克干涉仪中光学延迟距离上的来回次数,T和R则是FP 型萨尼亚克干涉仪中环形腔上入射镜面的透射率和反射率,并且满足关系T+R=1。萨尼亚克干涉仪的耦合系数与迈克耳孙干涉仪的关系可表示为:

从式(22)可以看出,与具有相同泵功率的迈克耳孙干涉仪相比,萨尼亚克干涉仪具有明显的响应优势。因为在萨尼亚克干涉仪中,每个离开主分束器的光束都会连续访问两个谐振腔,这意味着每个臂的功率是等效迈克耳孙干涉仪的2 倍,从而会产生2 倍的光机械响应。采用同样的aLIGO 参数,萨尼亚克干涉仪的量子噪声功率谱密度由下式给出:

其中,ΦL0是零差角,一般为π/2,量子噪声灵敏度曲线如图5 所示[14]。
事实上,萨尼亚克干涉仪也存在一些小问题,例如Glasgow 大学通过进行萨尼亚克干涉仪的原型设计实验证实:将两个大型的悬挂镜子放置在同一真空管会使得结构过于复杂而产生额外的噪声[25]。

图5 萨尼亚克干涉仪的量子噪声[14]
3.2 晃动式(Sloshing)干涉仪
Braginsky 等人[26]所提出的晃动式速度计,就相当于是在迈克耳孙干涉仪的输出端添加了一个辅助的“晃动”光学谐振腔。这使得引力波信号能在两个耦合腔之间来回“晃动”,并具有交替的方向和速度。当出射光经过“晃动”之后第二次通过干涉仪,此时测得的相位差与平均速度成正比,即进行了速度测量。晃动频率ωs由臂长L,晃动腔长L0以及输入耦合器的透射率T0来决定,有:

目前晃动式干涉仪有两个设计方案,如图6 所示,图6a) 中使用了一个额外的耦合腔[27],而图6b)中则用两个正交极化分离光束并以主干涉仪作为“晃动”腔[19]。
考虑一种理想情况,在没有损耗且共振调谐的条件下,我们给出晃动式干涉仪输入-输出的关系:

其中,KSSM是晃动式速度计的光机械耦合系数,一般可写为:

式中,βMI和αSC分别是频率在Ω处的边带经过主迈克耳孙干涉仪和晃动腔时产生的相位移动,由相同的参数,我们可以写出它的量子噪声功率谱密度:


图6 晃动式干涉仪的两个设计方案[19,26,27]
我们将它与迈克耳孙干涉仪的噪声功率谱密度进行对比,结果如图7 所示[14]。
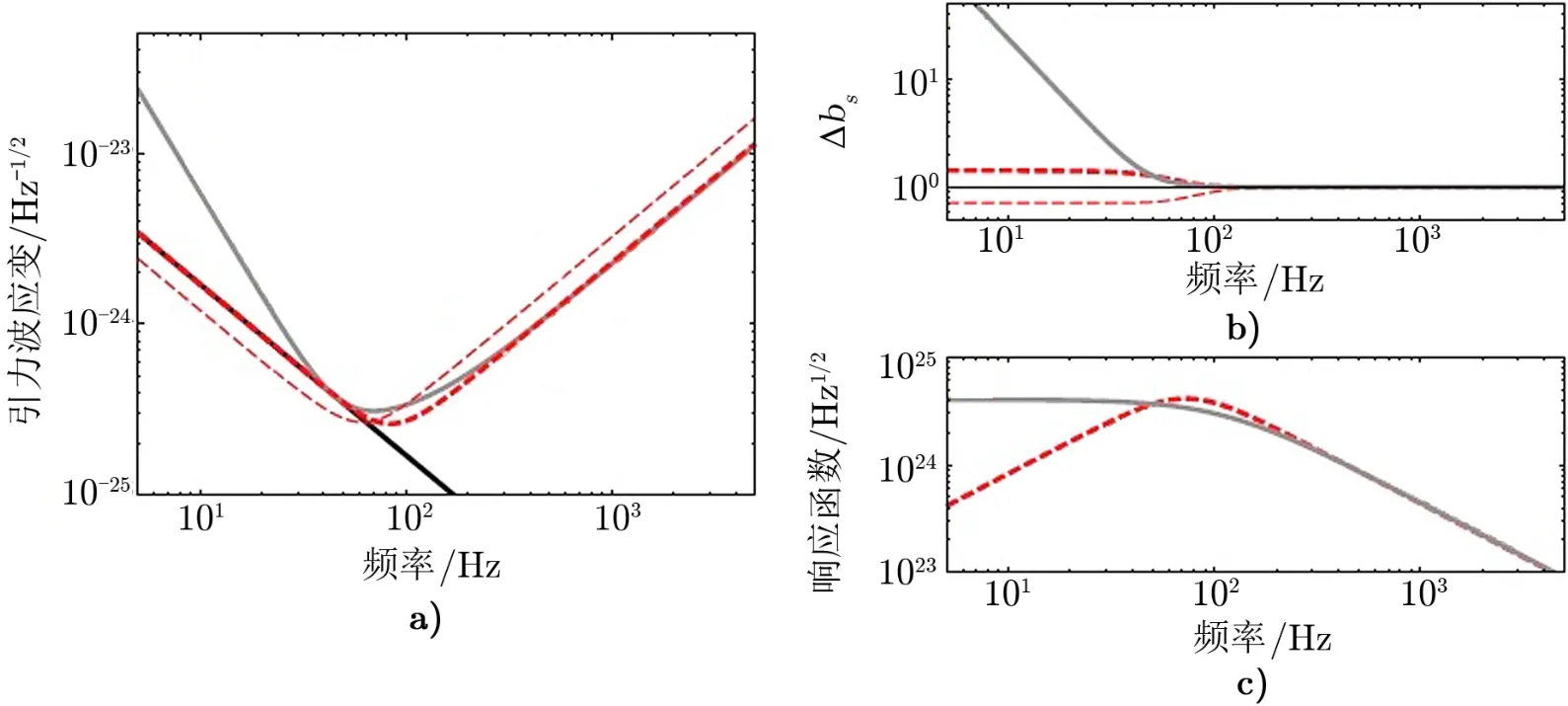
图7 晃动式速度计的量子噪声[14]
3.3 EPR 型速度计
2017 年,Knyazev 等人[21]提出了实现引力波激光干涉仪速度测量的第三种方案。它使用了两个等效的迈克耳孙干涉仪的模,如图8 所示。图8a)是EPR速度计的结构图,它有两个刚性连接的测试质量镜xn和xc,意味着它们使用了同一个截止测试质量镜。两个干涉仪的差分运动会因为各自带宽的不同而出现不同的速率,因此将两个干涉仪的读出光汇合在分束器上并读出“―”通道上的结果,得到的即是两个位置信号在不同时间的差值,这实际上就是速度测量。

图8 EPR 速度计的结构原理图[21]
很显然,图8a)的设计在现实中是极难实现的,Knyazev[21]又提出了一种基于正交偏振模式的光,如图8b)所示。这里的关键因素是一个1/4 波片(quarter-wave plate, QWP),它放置在主干涉仪和信号循环镜之间,充当了主干涉仪的两个正交偏振模式之间的π/2 相位延迟器。我们可以将主干涉仪、信号循环镜以及中间的1/4 波片一起视作一个信号循环腔(signal ring coelom, SRC)。在这个信号循环腔中,它会对其中一种偏振模式进行调谐,并与其共振,而由于1/4 波片产生了π/2 的相移,另一个正交的偏振光会将信号循环腔视为反共振。根据定标关系的结果[28],与信号循环腔共振的偏振模式在干涉仪中具有非常窄的有效带宽,而对于另一个正交的偏振光,有效带宽则大大增加[29]。通过选择载波光偏振面和垂直方向的角度来得到两个干涉仪中循环功率的最佳组合。
考虑到两个迈克耳孙干涉仪的带宽不同,分别计算每个干涉仪后并假设它们的测试质量镜有一个共同的反向作用,得到EPR 型速度计的输出-输入关系:
其中,K1,K2及β1,β2分别是2 个迈克耳孙干涉仪的光机械耦合因子和边带的相移。因为在输出端有“+”与“―”两个通道,所以我们会得到2 个通道的耦合因子K+和K−,以及它们的功率谱密度,分别表示为:
采用同样的参数进行计算,结果如图9 所示[14]。

图9 EPR型速度计的量子噪声[14]
4 总结与展望
与基于位置测量的迈克耳孙干涉仪相比,速度计干涉仪是目前最精确和最便于研究的替代方案。它的主要优点是极大地减少了激光反作用带来的噪声,即辐射压力噪声。如果仅考虑量子噪声,那么它与同等参数的迈克耳孙干涉仪相比,辐射压力噪声最多可以下降2 个数量级[17]。尽管在低频下辐射压力噪声也存在着响应消除的问题,但是反作用的减少仍然更大,因此信噪比会增加。
本文主要介绍了速度计的三个主要方案,并将它们与迈克耳孙干涉仪在性能上进行了比较。到目前为止,所有的研究都表明,即使在有损耗和缺陷的情况下,速度计的性能仍然优于传统的迈克耳孙干涉仪[30,31]。然而,在做出任何的最终结论之前,仍需要对所有速度计方案中的损失和缺陷进行彻底和系统的研究,以及进行实验原型的设计与测试。
一个未来可以研究的方向是带有额外的内部或者外部滤波器的速度计,由于光机械耦合强度在低频时近似恒定,这意味着所产生的压缩光在这些频率下与频率无关。通过解谐,可以使功率波动的带宽增强,或者说是测试质量的机械响应的带宽增强。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
量子电子学报(2022年2期)2022-04-16
量子电子学报(2022年1期)2022-02-25
现代装饰(2020年4期)2020-05-20
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(学生版)(2020年1期)2020-01-19
航天电子对抗(2019年4期)2019-06-02
科学大众(中学)(2019年2期)2019-04-08
航天返回与遥感(2018年3期)2018-08-10
制导与引信(2017年3期)2017-11-02
