微小卫星电源系统控制策略研究
2020-01-17 07:41韩尚卿
探索科学(学术版) 2019年4期
韩尚卿
天津航天中为数据系统科技有限公司 天津 300301
引言
微小卫星电源系统可靠供电是整星各分系统稳定工作的前提,当前,在轨航天器普遍采用太阳能电池阵和蓄电池组联合供电的方式维持整星能源平衡。
按控制策略分类,可将微小卫星电源系统所采用的能量传输方式分为直接能量传输(DET)方式和最大功率点追踪(MPPT)能量传输方式。相应拓扑结构分别如图1和图2所示。
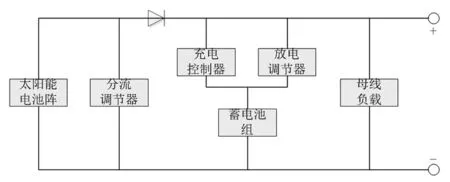
图1 DET 能量传输方式拓扑结构
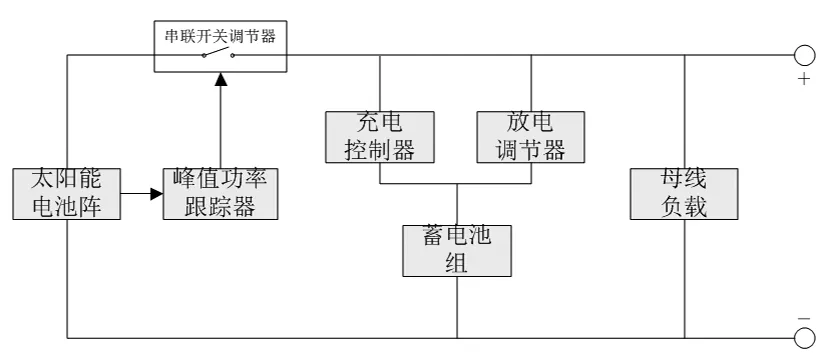
图2 MPPT 能量传输方式拓扑结构
DET 能量传输方式中,使用分流调节器与太阳能电池阵并联,太阳能电池阵产生的能量直接传递至母线,通过分流调节器消耗多余能量,属耗散型分系统[1,2]。
MPPT 能量传输方式中,使用串联开关调节器与太阳能电池阵串联,通过串联开关调节器控制太阳能电池阵的输出功率,可实现以太阳能电池阵最大功率进行输出,属非耗散型分系统[1,2]。
DET 和MPPT 能量传输方式的特点如表1所示。
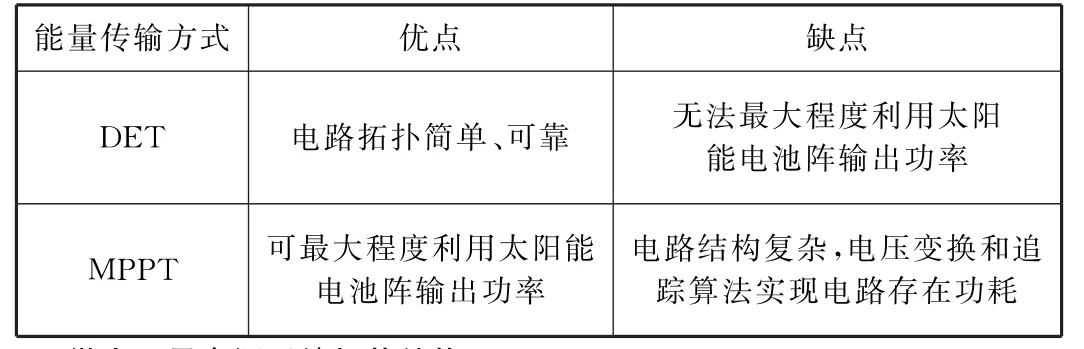
表1 DET 和MPPT 能量传输方式特点
1 微小卫星电源系统拓扑结构
为最大程度利用太阳能电池阵输出功率,提高能源转化效率,本文采用MPPT 能量传输方式。采用MPPT 能量传输方式的微小卫星电源系统由太阳能电池阵发电单元、蓄电池组充放电单元、FPGA 控制器等部分组成,拓扑结构如图3所示。
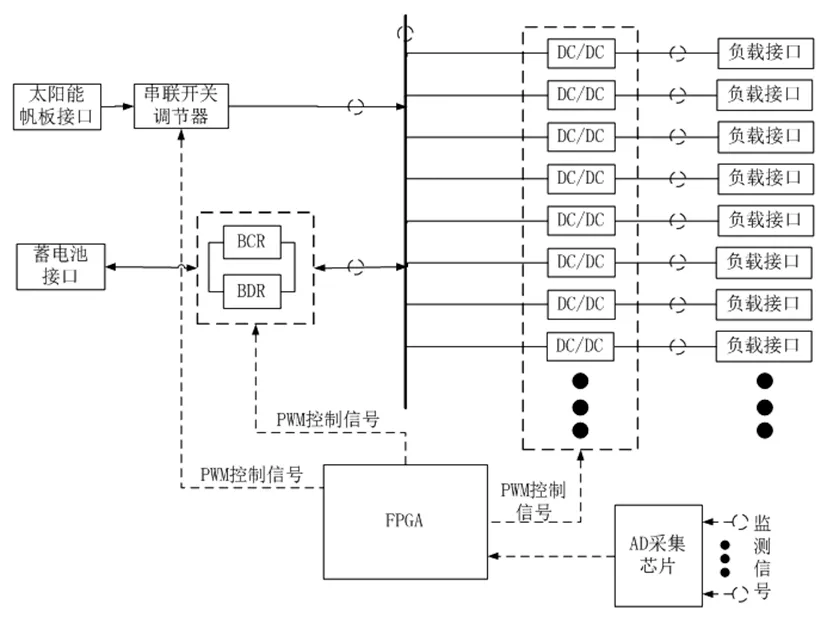
图3 微小卫星电源系统拓扑结构
2 太阳能电池仿真
由图3可知,太阳能电池阵通过串联开关调节器接入直流母线,蓄电池组通过充电调节器(BCR)和放电调节器(BDR)接入直流母线,各通道负载通过DC/DC变流器接入直流母线。各监测点的电压、电流等信号通过AD采集芯片发送至FPGA,AD 芯片完成系统状态量信号采集与实时监控,FPGA 实时识别异常状态并进行故障诊断与处理。
FPGA 控制器通过向各变流器发送PWM 控制信号,实现整星电源系统控制,包括太阳能电池阵MPPT 控制、蓄电池充放电控制、故障诊断与处理等,最终实现微小卫星太阳能电池阵和蓄电池组联合供电系统的智能化运行。
太阳能电池吸收光能后,生成电子空穴对,电子和空穴在电场作用下分离,在太阳能电池正极与负极间形成电势差,最终将太阳光能量转化为电能。
太阳能电池等效电路如图4所示。
图4中,U、I分别为太阳能电池输出电压、输出电流。Isc为太阳能帆板在一定光照强度下产生的激发电流,其数值受光照强度等因素影响。二极管电流Id为P-N 结总扩散电流。Rsh为电池旁路电阻,Rs为电池串联电阻,可用电池内阻等效。
太阳能电池等效模型的表达式为:
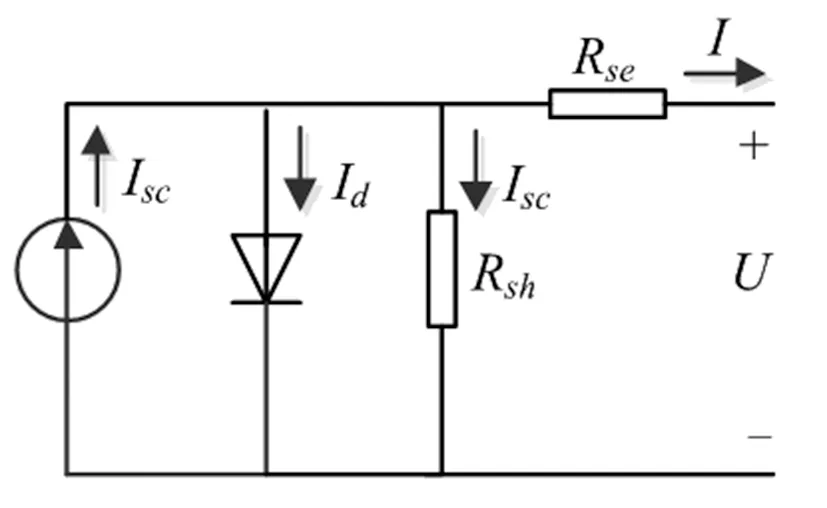
图4 太阳能电池等效电路

鉴于旁路电阻值Rsh很大,串联电阻值Rs很小,将式(2-1)简化为:

与输出特性紧密相关的主要参数包括:开路电压Uoc、短路电流Isc、最大功率点Pm、最大功率点处对应的电压Um和电流Im。由于环境因素将影响太阳能电池输出性能,将光照和温度参数列入表达式中,可得如下公式:

其中,
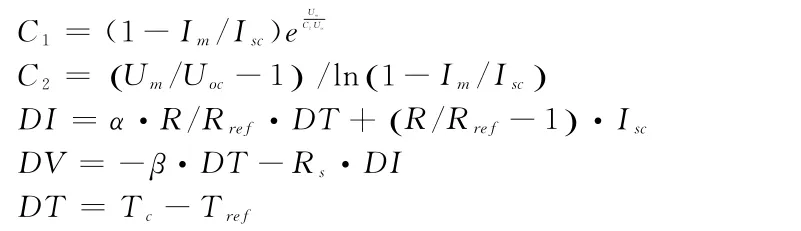
Tref-温度参考值
Rref-光照强度参考值
α-电流变化系数 (A m ps/°C)
β-电压变化系数 (V /°C)
在MATLAB/Simulink中建立太阳能电池仿真模型,如图5所示。
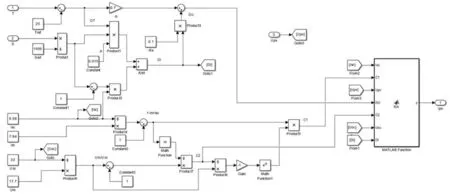
图5 太阳能电池等效模型仿真图
太阳能电池仿真模型中主要参数见表2所示。

表2 太阳能电池仿真参数
当温度固定,光照强度不同时,太阳能电池等效模型I-U 仿真结果如图6所示。仿真结果与光伏特性曲线一致,太阳能电池电流输出能力随光照强度增加而增强、随光照强度减少而减弱。

图6 太阳能电池I-U 仿真结果图
当温度固定,光照强度不同时,太阳能电池等效模型P-U 仿真结果如图7所示。仿真结果与光伏特性曲线一致,太阳能电池功率输出能力随光照强度增加而增强、随光照强度减少而减弱。

图7 太阳能电池P-U 仿真结果图
可见,若能通过某种技术手段,使太阳能电池在变化的光照强度下始终输出最大功率,即始终工作于最大功率点,将大大提高能源转化效率以及太阳能电池的供电能力。
3 MPPT 控制策略
MPPT 控制方法众多,包括恒定电压法、扰动观察法、电导增量法等。每种方法各具特点,考虑到扰动观察法具有复杂度较低且跟踪性能较高等优点,本文采用扰动观测法作为MPPT 控制策略。
当太阳能电池内阻为Ri,外部负载为R,占空比为T 时,存在关系式Ri=R(1-T)2,若R 数值固定,通过调节占空比,可调节太阳能电池内阻阻抗。
MPPT 工作原理为:当太阳能电池所处环境动态变化时,通过控制算法调节串联开关调节器工作状态来改变太阳能电池内阻阻抗,当电池内阻与外部负载阻抗相等时,可使太阳能电池输出最大功率。
3.1 定步长MPPT 控制策略 为太阳能电池输出电压初始值指定某一移动方向和步长,输出电压初始值按指定移动方向移动,通过判断输出电压的移动趋势是否逼近最大功率点工作电压Um,确定下一时刻输出电压的移动方向,最终使输出电压追踪到最大功率点工作电压Um。扰动观测法原理图如图8所示。
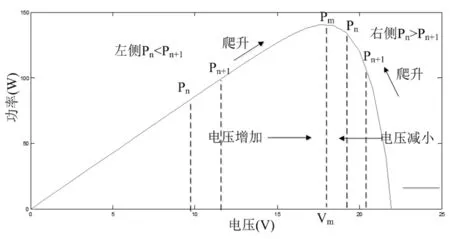
图8 扰动观测法原理图
依据扰动观测法原理,当输出电压初始值位于Um左侧时,假设输出电压移动方向为向右移动,移动后:
若Δp>0,可知电压移动方向正确,此时电压值正接近Um,下次移动应继续沿该方向进行;
若Δp<0,可知电压移动方向错误,电压值正远离Um,下次移动应沿相反方向进行。
同理,可知初始输出电压值位于Um右侧时输出电压的动态追踪过程。定步长最大功率点追踪过程的流程图如图9所示:
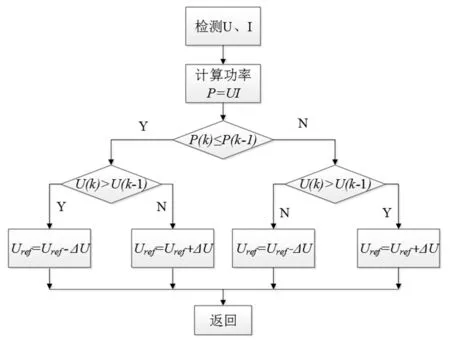
图9 定步长追踪流程图
如图9所示,定步长最大功率点追踪过程为:k时刻,通过电压传感器、电流传感器采集太阳能电池输出电压U(k)和输出电流I(k),可知太阳能电池输出功率P(k)=U(k)*I(k),若上一时刻输出功率为P(k-1),为追踪到最大功率点,通过比较P(k)和P(k-1),可知下一时刻输出电压移动方向。
定步长追踪控制策略简单有效,但由于该方法步长固定,造成对最大功率点的追踪速率和追踪精度存在冲突。若步长小,则MPPT 追踪精度高,但追踪速度慢;若步长大,则MPPT 追踪速度快,但精度低。此外,定步长MPPT 控制策略易在最大功率点附近发生震荡,造成母线电压纹波过大。发生震荡的原因为:若输出电压初始值与步长不匹配,逼近最大功率点时,输出电压难以恰好移动到Um处,一般会在Um两侧反复震荡。
3.2 变步长MPPT 控制策略 由于定步长MPPT 控制策略存在缺陷,本文采用变步长MPPT 控制策略,通过在不同的追踪阶段下,选择适当时机改变步长或停止追踪,可兼顾追踪速度与追踪精度,并避免在最大功率点处发生震荡。
为规避定步长最大功率点追踪策略缺陷,设置参数a和参数b,在追踪过程中,计算k、k-1时刻的功率差Δp,并依据Δp设置多级步长,第一级步长采用较大步长,第二级步长采用较小步长。
若Δp>a,此时距离最大功率点较远,应以更快速度趋近最大功率点,采用第一级步长;
若b<Δp≤a,此时距离最大功率点较近,只需细微变化,便可趋近最大功率点,应以更高精度趋近最大功率点,采用第二级步长;
若Δp≤b,此时输出功率非常趋近于最大功率点,二者功率值近似相等,选取该点为最大功率点,为避免震荡,停止追踪。
变步长MPPT 控制策略流程图如图10所示。

图10 变步长MPPT 控制策略流程图
3.3 仿真分析 在MPPT 能量传输系统中,串联开关调节器的硬件拓扑结构为DC/DC变流器,为满足应用需求且控制成本,本文采用Boost变流器。
在MATLAB/Simulink中,将太阳能电池等效模型和MPPT 控制策略算法分别封装,将太阳能电池与串联开关调节器串联后接入直流母线,采用MPPT 控制信号驱动DC/DC,建立采用MPPT 控制策略下的太阳能电池发电仿真模型如图11所示,仿真环境参数选取常规温度和光照强度,即T=25℃,S=1000W/m2。

图11 太阳能发电仿真模型
定步长MPPT 控制策略下,当定步长设置为0.002时,太阳能帆板输出功率、输出电压、输出电流随时间变化的仿真结果如图12所示。

图12 定步长仿真结果图
通过仿真结果可知,通过定步长MPPT 控制,仿真结果收敛,太阳能电池可追踪至最大功率点工作,并稳定输出功率,为整星各分系统负载有效供电。MPPT 到达稳定状态的调节时间为0.037s,追踪速度快,但由于步长较大,追踪到的最大功率点与理论值存在较大偏差,即追踪精度差。此外,在最大功率点附近出现反复震荡的情况,这将导致母线出现纹波,影响供电质量,不利于负载正常工作。
当定步长设置为0.0005时,太阳能帆板输出功率、输出电压、输出电流随时间变化的仿真结果如图13所示。

图13 定步长仿真结果图
通过仿真结果可知,通过定步长MPPT 控制,仿真结果收敛,太阳能电池可追踪至最大功率点工作,并稳定输出功率,为整星各分系统负载有效供电。MPPT 到达稳定状态的调节时间为0.075s,追踪到的最大功率点与理论值接近,即追踪精度高,但由于步长较小,导致追踪速度慢。此外,在最大功率点附近依然出现反复震荡的情况。值得注意的是,相对于图12仿真结果而言,振幅随步长变小而明显减小,即母线出现的纹波减弱。
由前文分析可知,变步长MPPT 控制策略可兼顾追踪速度与追踪精度,并避免在最大功率点处发生震荡,变步长MPPT 控制策略仿真结果如图14所示,此时,一级步长设置为0.002,二级步长设置为0.0005。
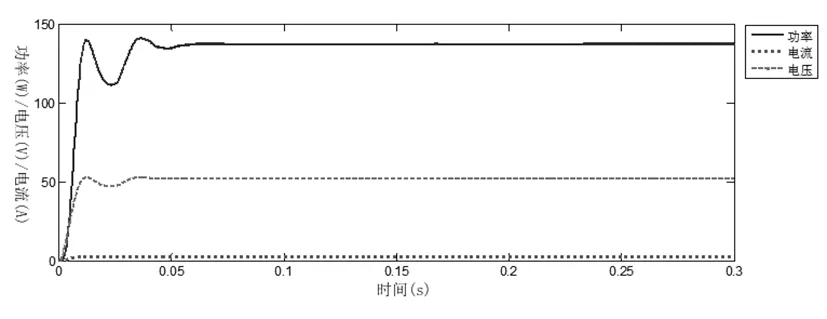
图14 变步长仿真结果图
通过仿真结果可知,MPPT 到达稳定状态的调节时间为0.05s。调节时间介于图12和图13之间,较图12有所增加的原因为:为提高精度,设置了较小的二级步长,导致追踪后期收敛速度减慢,但调节时间依然处于合理范围内。二级步长的设置有效提升了追踪精度,追踪到的最大功率点与理论值接近,即追踪精度高,且在最大功率点附近不再出现反复震荡的情况,使供电质量显著提升,从而更好的保障整星各分系统负载正常工作。
综上所述,变步长MPPT 控制策略可有效克服定步长MPPT 控制策略的缺陷,兼顾追踪速度与追踪精度,同时避免最大功率点附近出现震荡现象。
4 结语
本文通过建立太阳能电池阵等效模型,进行太阳能电池仿真建模,分析比较定步长MPPT 控制策略和变步长MPPT 控制策略,进行基于MPPT 的太阳能发电单元的仿真建模,验证了MPPT 控制策略在微小卫星电源系统控制中的优势与有效性。
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
成都信息工程大学学报(2021年5期)2021-12-30
中国惯性技术学报(2020年2期)2020-07-24
宇航计测技术(2018年3期)2018-09-08
科技创新与应用(2017年18期)2017-06-27
电脑知识与技术(2016年36期)2017-04-17
科技传播(2016年19期)2016-12-27
北京航空航天大学学报(2016年12期)2016-02-27
汽车与新动力(2015年1期)2015-02-27
中国医用工程与装备(2014年9期)2014-11-20