基于Kenblock单片机的陆地升降车设计
2020-01-17 07:40黄虹锦杨宇航陈俞州
探索科学(学术版) 2019年4期
陈 奎 黄虹锦 周 翔 杨宇航 陈俞州
1.重庆科技学院 机械与动力工程学院 重庆 401331;2.重庆科技学院 智能技术与工程学院 重庆 401331
0 前言
随着科学技术的迅猛发展,智能家居、机器人等逐渐进入了人们的生活。最常见的智能机器人便是可移动的智能小车[1],智能小车的应用非常广泛,在军事勘测、智能救援、消防、扫地、运货等方面,都能看到智能小车的使用[2]。同时现有的陆地升降车大多都以液压式为动力系统,现有液压升降车的车身较窄、重心高,在行驶过程中车辆的行驶平稳性和操纵稳定性较低,容易发生侧翻等安全生产事故[3]。本次设计通过Kenblock NEO-328P单片机和啃萝卜编程平台设计了一种智能陆地升降车,升降车通过2.4G 转串口模块可实现由人对升降车的智能控制,并对升降车的机械结构进行了完整的设计,保证了升降车的稳定性和操作灵活性,实现了对陆地升降车的智能化设计与创新。
1 总体方案设计
本次设计通过Kenblock NEO-328P单片机与2.4G 转串口模块和操作手柄的使用,实现了由人对升降车夹取和运动的控制。2.4G 转串口模块与操作手柄的蓝牙连接配对,来接收操作手柄发送过来的蓝牙无线信号,再将该信号传递给单片机,通过单片机来分析传递过来的信号来跳转不同的程序来控制电机的驱动、物块的夹取,实现小车各种功能[4]。其系统设计如图1所示。
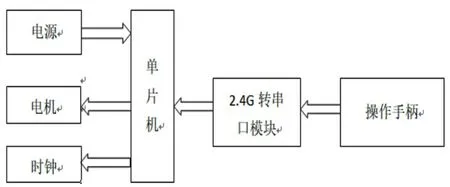
图1 系统设计框图
2 硬件设计
整个系统的硬件设计共有4部分组成:单片机控制模块、电源模块、电机驱动模块以及2.4G 转串口模块[4]。
2.1 单片机控制模块 单片机控制模块是整个升降车控制的核心,本次采用Kenblock NEO-328P 单片机实现对小车的控制。同时通过Kenblock NEO-328P单片机实现对2.4G 转串口模块的数据进行收集与处理,以实现对操作手柄和升降车运动和动作的控制。
2.2 电机驱动模块 L298N 是一种常用的电机驱动芯片,它具有高电压,大电流的特点。该芯片内的两个全桥式驱动器,可以用来驱动直流电机和步进电机。由于L298N 的输出电流较大,一般需要安装 散热片。ISENA、ISENB是反馈端,一般接地,将这两端与小系 统板的接地端接在一起。IN1、IN2、IN3、IN4四个输入端,接单片机端口,通过编程来控制小车的运动。OUT1、OUT2、OUT3、OUT4 与IN 对应的输出端接电机;ENA 为使能端,高电平有效,控制OUT1、OUT2;ENB为使能端,高电平有效,控制OUT3、OUT4[5]。由L298N 作为驱动芯片的驱动电路图如图2所示。
2.3 电源模块 本次设计的电源模块采用11.1V、3s、2200mah的航模锂电池进行电源供电,可保证对Kenblock NEO-328P 单片机的正常、安全的供电,同时该型号航模锂电池工作温度范围较大,可保证电源的使用寿命和减少环境因素的影响。
2.4 2.4G 转串口模块 2.4G 转串口模块是一种通讯模块,通讯频段为公共频段2.4G,两个2.4G 模块通过设置相同的组网ID 和通讯信道,可以互相通讯,在Kenblock中2.4G 转串口模块用于与无线手柄相互通讯,以做各种案例的遥控器使用。
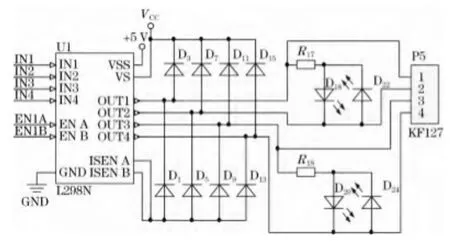
图2 驱动电路图
3 机械结构设计
机械结构的设计是本次设计最为重要的部分,本次设计通过对升降车重心位置的验证和实验确保了升降车行驶的稳定性,同时设计了限位机构解决了以往升降车后退时所出现的剧烈晃动的现象,并选用万向轮作为升降车的前驱部分确保了升降车转弯和移动的灵活性。
3.1 整体设计 本次升降车的整体框架的机械设计按照传统升降车的机械结构进行设计,可实现机械爪的灵活移动和夹取,车身前部分为锂电池与单片机,后部分为梁结构搭建的框架,使得重心得到了合理的分配,在合理完成工作任务的同时保证了升降车的稳定。升降车的实物图如图3所示。
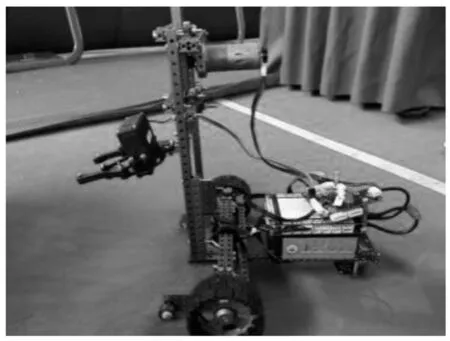
图3 升降车实物图
3.2 限位机构 限位机构是本次设计的创新点,在升降车后部左右两边分别各增加一个滑轮,并距离地面大约2cm 左右,通过增加此限位机构,小车在前进过程中可以更加灵活和平稳,同时解决了传统液压升降车后退时车身剧烈抖动的现象保证了其稳定性。
4 软件设计
主程序是在单片机的控制下完成的,通过对2.4G 转串口模块输入的指令信息进行分析处理,来控制电机驱动,进而达到控制小车运行的目的。其软件流程图如图4所示[4]。
5 系统调试
在完成升降车的整体设计和组装过后,我们通过啃萝卜平台编译环境对升降车进行了整体性调试和局部调试。
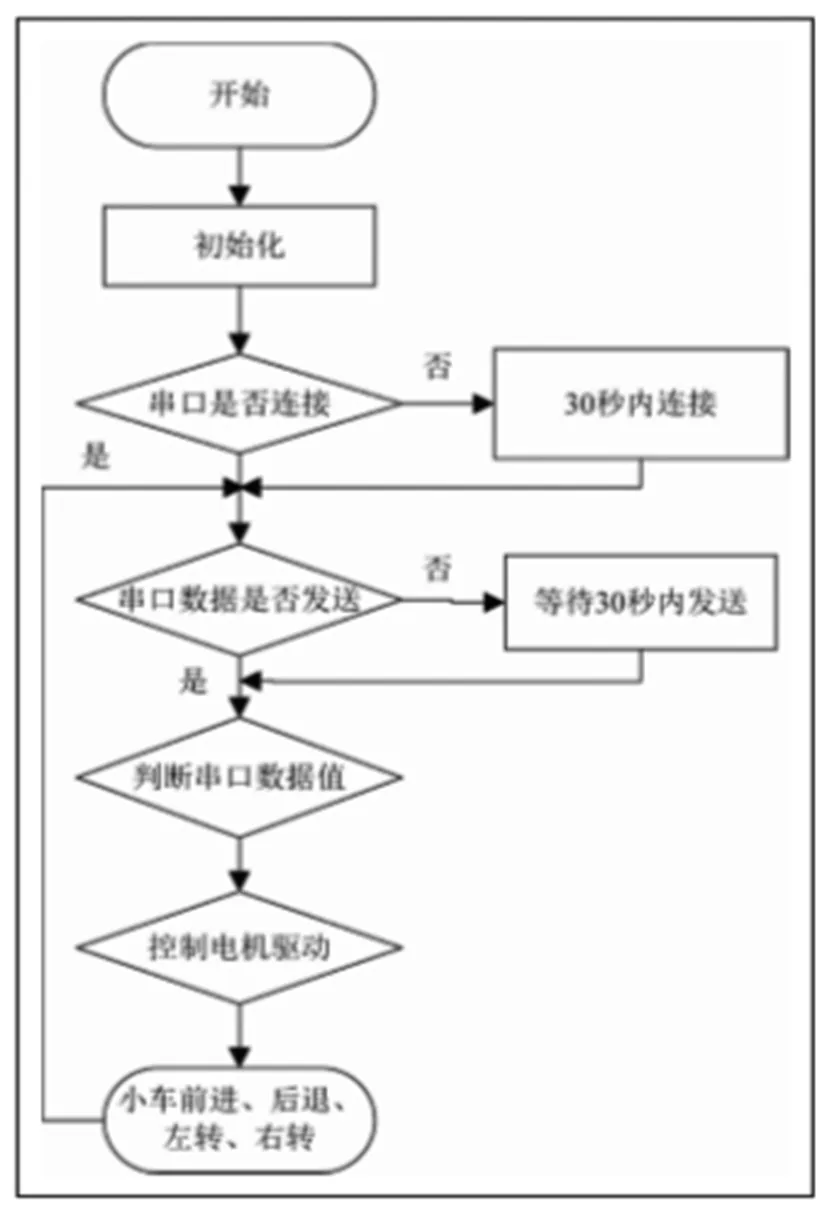
图4 软件流程图
5.1 局部调试 本次局部调试首先将操作手柄与2.4G 转串口模块进行配对,经实际调试过后发现,操作手柄与2.4G 转串口模块建立了正常的通讯联系,人们可以通过操作手柄对升降车进行运动控制和对物块的抓取。实验表明操作手柄可以对机械爪进行正常的操作控制。
5.2 整体调试 在局部调试成功的前提下,对升降车的整体进行了功能调试,在调试过程中发现,通过操作手柄和2.4G 转串口模块的正常通讯并由单片机对其信号进行处理后,升降车可以正常的按照人们的控制对其进行控制,满足了人们对工程上和生活上的要求。
6 结束语
本设计通过采用Kenblock NEO-328P单片机与2.4G 转串口模块及操作手柄的结合使用,实现一种可以由人们控制使用的陆地升降车,这对于以后智能小车的发展和自我实践能力的发展具有一定的促进作用。
猜你喜欢
气象水文海洋仪器(2021年3期)2021-10-15
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年11期)2021-01-26
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
现代计算机(2020年3期)2020-03-05
文苑(2018年22期)2018-11-19
电子制作(2018年11期)2018-08-04
电子制作(2018年8期)2018-06-26
数码世界(2017年5期)2017-06-06