基于Pancharatnam-Berry相位超表面的二维光学边缘检测*
2020-01-16 00:37谢智强贺炎亮王佩佩苏明样陈学钰杨博刘俊敏周新星李瑛陈书青范滇元
物理学报 2020年1期
谢智强 贺炎亮 王佩佩 苏明样 陈学钰 杨博 刘俊敏 周新星 李瑛 陈书青† 范滇元
1) (深圳大学二维材料光电科技国际合作联合实验室, 广东省二维材料信息功能器件与系统工程技术研究中心, 深圳 518060)
2) (深圳技术大学新材料与新能源学院, 深圳 518118)
3) (湖南师范大学物理与电子学院量子效应及其应用协同创新中心, 长沙 410081)
提出并设计一种基于Pancharatnam-Berry (P-B)相位超表面的二维光学微分器, 并实现对光学图像的二维光学边缘检测.在环形光栅相位的作用下, 该P-B相位超表面可将光束的左右旋分量在径向进行分离,在滤除中间重叠部分的线偏振光后, 保留下来的光学信息即为二维光学微分结果.同时, 通过调节该二维光学微分器的光轴分布函数可对边缘信息分辨率进行灵活调控.研究结果表明, 上述P-B相位超表面可用于光学图像的二维边缘信息提取, 相比于一维光栅式超表面, 该方法得到的边缘信息更加完整、清晰.可以预期,这种二维光学微分器在超快光学计算与光学图像处理等方面具有重要的潜在应用价值.
1 引 言
边缘信息是物体的基本特征, 能清晰地勾勒出物体的轮廓和纹理, 传达物体的重要信息[1], 对人类视觉感知具有特殊意义.由于边缘信息保留了物体大部分有效信息与重要的几何特性, 边缘检测技术能够极大减少待处理数据量.然而传统数字图像处理方法需要对物体成像, 然后导入计算机进行运算, 步骤繁琐且处理速度慢, 对所处理数据的大小也有限制.针对这一问题, 研究人员提出光学模拟计算方法[2−6], 可以对入射空间光场进行不同的数学运算, 该方法已经被广泛应用于全光信息处理中时域与频域的实时计算.目前已有大量时域光学模拟计算方法被提出, 其中包括基于环形谐振腔的光学差分器[7]、时域光子积分器[8]、全光常微分方程求解器等[9].此外, 对于空间域的光学模拟计算, 可通过设计适当超表面或者超材料在空间域实现所需要的传递函数, 以达到包括边缘检测在内的多种光学数学运算[4,10−12].同时, 利用布拉格光栅的相移特性, 通过设计分层结构, 有望对入射光实现空间差分[13].利用近场表面等离子体波对物体激发的等离子体暗场显微镜也是一种有效的边缘检测方法[14].
最近, 罗海陆等[15]提出一种基于Pancharatnam-Berry (P-B) 型相位超表面实现一维光学差分的机制, 在两块相互正交的偏振器中间插入一块设计好的P-B相位超表面, 以此实现空间光学差分.然而该工作仅在一维情况下利用光学差分对物体进行光学边缘检测.若仅对物体进行一维光学边缘检测, 大量边缘信息将会丢失, 阻碍其在实际中应用.相比而言, 二维边缘检测能完整保留所有方向的边缘信息.为了实现二维边缘检测, 可使用基于相移布拉格光栅以实现拉普拉斯算子的二维微分器[16].然而, 其检测效果依赖于布拉格光栅层数和尺寸的增加, 这无疑会极大增加结构的复杂程度和制备难度.此外, 一种基于导模共振原理, 并兼容 CMOS的二维周期性的电介质超表面也被用于二维边缘检测[11].该超表面结构为在二氧化硅衬底上镀一层周期性排布的氮化硅, 由于其结构呈周期性排布, 当平面波入射至超表面后被耦合为漏波导模.当满足导模共振条件时, 可形成高品质的共振, 进而用于实现边缘检测.
针对光学边缘检测在边缘图像信息丢失方面存在的问题, 本文提出并设计一种P-B相位超表面对成像物体进行二维光学边缘检测.超表面的微结构单元采用环形周期性排布, 利用P-B相位的光子自旋效应, 当线偏振光通过该超表面后, 其左旋 圆 偏 振 (left-handed circularly polarization,LHCP)与右旋圆偏振 (right-handed circularly polarization, RHCP)分量将会在径向产生相对位移.当位移距离足够小的情况下, 中间重叠部分由于同时包含了LHCP与RHCP两个分量, 其偏振态仍为线偏振.将中间部分的线偏振光滤除仅留下外侧的边缘信息, 由于是在径向进行分离, 边缘信息中同时包含x方向与y方向的边缘信息, 可实现二维边缘检测.不同于其他空间微分方法, 该方法没有复杂的层状结构或需要临界等离子体耦合条件, 仅通过一块超表面便可实现二维光学边缘检测.此外, 为了进一步研究影响边缘信息分辨率的因素, 我们对超表面微结构单元的光轴分布函数进行了研究.结果表明, 若光栅周期增加, 即相对位移增加, 中间重叠部分的相位差不一致, 边缘信息会变模糊, 并且边缘信息的分辨率与光轴分布径向函数的幂指数成反比.
2 P-B超表面实现二维光学边缘检测的原理
2.1 P-B相位超表面设计原理
不同于传输相位通过控制光程来改变相位[17−20],P-B相位是一种通过改变光场偏振态而产生的几何相位[21,22], 其相位变化与偏振变化相关.例如,当LHCP光通过一块半波片后, 其偏振会被转换为RHCP态, 同时携带上一个附加相位, 这个相位即为P-B 相位.其遵守原则, 其中ϕ为半波片的光轴旋转角.由于P-B相位型超表面对LHCP和RHCP光束具有不同的相位响应, 若设计恰当的相位分布, 便可使入射的光子发生自旋分离[23−26], 这种自旋分离是实现光学边缘检测的关键.
根据光子自旋分离原理, 为了使LHCP与RHCP光束通过超表面后产生的附加相位相互共轭, 超表面的每个单元结构都需满足半波片条件,即δx−δy= π , 其中δx,δy分别为单元结构对x与y方向偏振的相位响应.由于非晶态TiO2的透明窗口达360 nm, 其带间跃迁刚好处于可见光谱之外, 在整个可见光波段具有很高的传输效率且可达到 0—2π 的相位变化[27,28].因此, 选择 TiO2作为P-B相位超表面中介质柱的材料.图1(a)为设计的微结构单元, 其中基底材料为SiO2, 介质柱材料为 TiO2.介质柱高度h= 600 nm, 晶格大小为325 nm, 即Px=Py= 325 nm.介质柱长为l, 宽为w, 其长轴与x轴的夹角为ϕ.首先, 为使得每个单元结构都满足半波条件, 分别以波长为532 nm的x与y方向的线偏振光作为入射光, 对单元结构中介质柱的长宽 (l,w) 进行参数扫描, 得到δx、δy与 (l,w) 的关系如图1(b)和 (c)所示.图1(d)为δx、δy之间的的相位差值与 (l,w) 的关系, 为满足δx−δy=π以达到半波条件, 选择l= 300 nm,w=105 nm.在确定介质柱长与宽之后, 将入射光源设置为圆偏振光, 对单元结构中介质柱旋转角度进行参数扫描, 所得圆偏振光通过单元结构得到的附加相位与介质柱旋转角度的关系曲线如图1(e)所示.从图中可看出, 圆偏振光入射后得到的附加相位可以覆盖整个0—2π区间.因此, 根据二维边缘检测所需P-B相位分布可以设计超表面上介质柱的排布方式.
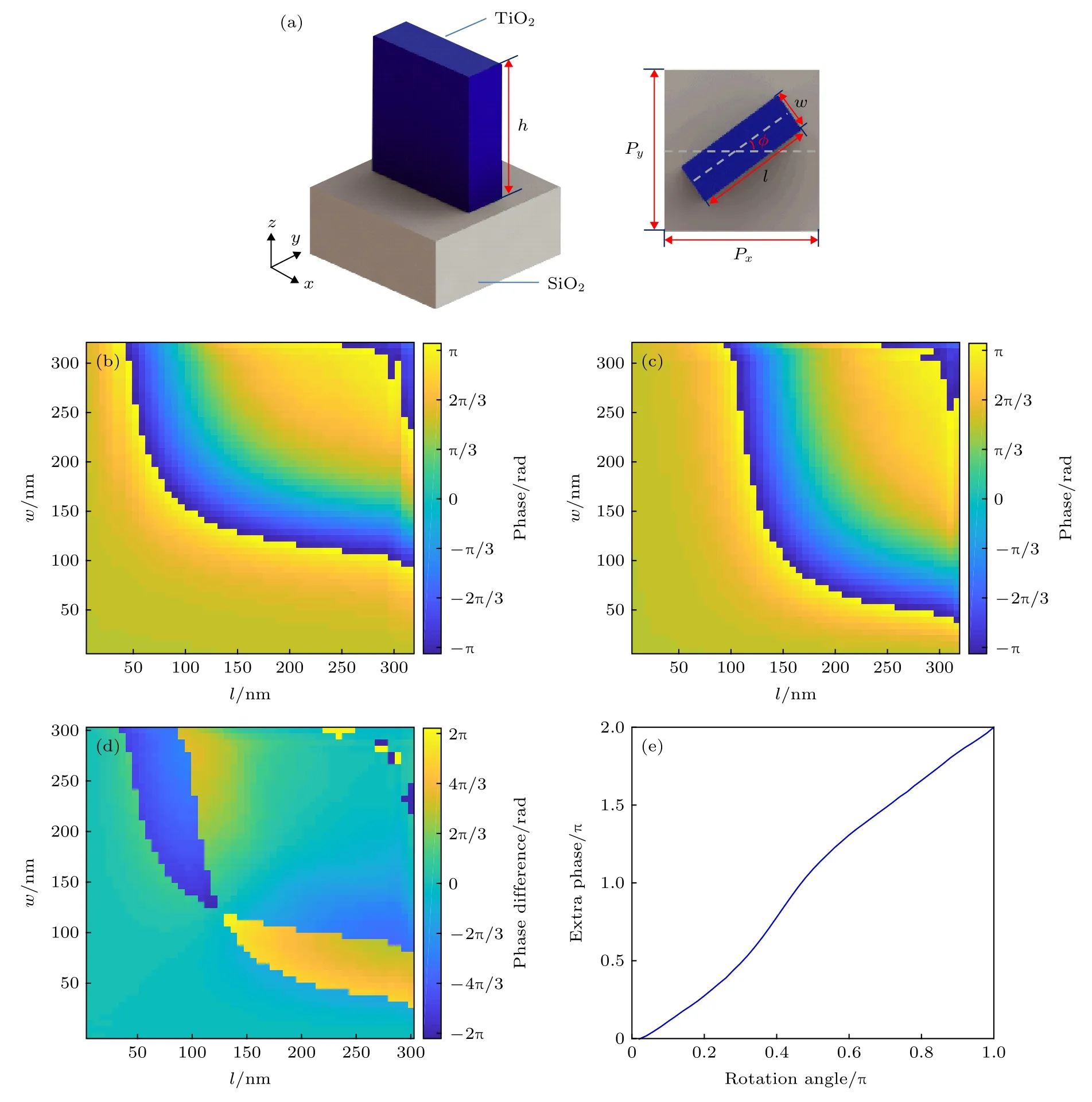
图1 (a)单元结构示意图; (b)与 (c) x 与 y 方向线偏振入射光相位响应与介质柱长 (l)、宽 (w)之间的关系; (d) x 和 y 方向上的相位差随l和w变化关系; (e)介质柱的旋转角与附加相位关系图.Fig.1.(a) Schematic for basic unit structure; (b) and (c) phase response of different length (l) and width (w) of the dielectric column under x- and y- LP incident beams; (d) phase difference between the x- and y-polarized light for different length (l) and width (w) of the dielectric column; (e) relationship between the rotation angle of the dielectric column and the additional phase.
2.2 基于P-B相位超表面实现二维边缘检测的原理
图2(a)为二维光学边缘检测原理示意图.当一束线偏振 (linearly polarized, LP)平面波入射至设计好的P-B相位超表面, 经过傅里叶变换后在像平面中LHCP分量沿着径向向外扩大, RHCP分量沿着径向向内缩小, 中间重叠部分仍为LP.通过检偏器将LP消光, 仅留下边缘位置光强, 便可达到边缘检测的效果.由于超表面光轴方向为局部变化[29], 根据琼斯理论, 超表面的光学传输矩阵可以表示为[21]

假设所设计的超表面处于傅里叶平面, 则入射光中右旋圆偏振分量在傅里叶平面的场分布可通过傅里叶变换得到:


图2 (a)光学二维边缘检测原理图; (b) LHCP 与 RHCP 通过 PB 相位超表面后获得的相位梯度变化; (c) P-B 相位超表面示意图; (d)和(e) RHCP与LHCP平面波通过超表面后波前变化图Fig.2.(a) Schematic diagram of the 2D optical edge detection; (b) phase gradient of the LHCP and RHCP component after the P-B phase matesurface; (c) diagram of the metasurface; (d) and (e) wavefront changes of RHCP and LHCP plane waves through the metasurface.
其中:ρ=r′/λf,r′为傅里叶平面处空间径向坐标,λ为工作波长,f为焦距;代表右旋偏振态; F FT 为傅里叶变换符号.传输光场通过P-B相位超表面后得到的场分布可表示为
其中ψ(x,y)=2ϕ(x,y) 为光场通过超表面后所得到附加P-B相位,ψ的正负与入射光偏振的旋向相关.在像平面得到的场分布为

其中, *表示卷积运算, 像移∆=λf/T, 与 P-B 相位超表面光轴分布函数中r的幂指数和周期T相关.

如果入射光为线偏振态, 其可分解为LHCP与RHCP两个分量.通过P-B相位超表面后, 在像平面便可得到两个向相反方向位移像的叠加场:

最后利用检偏器将两个分量的偏振转换为同一方向, 得到的场分布为

如果通过控制超表面光轴分布函数r的幂指数与周期T, 使得像移∆足够小, 便可以达到边缘检测的目的.因为所以其最后输出场中同时包含了x与y两个方向的边缘信息, 所得结果即为二维边缘检测结果.图2(c)为根据超表面的光轴分布所设计的超表面示意图, 当LP光束通过该超表面后, LHCP与RHCP两个分量会分别得到如图2(b)所示的两个相互共轭的附加相位梯度.当LP平面波通过该超表面时, 沿z轴传播的波前变化如图2(d)与(f)所示.随着传输距离的增加, LHCP与RHCP会在径向产生相对位移, 与理论结果相吻合.
3 仿真模拟结果
使用深圳大学的校徽作为掩模板, 当一束平面波通过掩模板后, 其光强分布如图3(a)所示.首先, 利用文献[15]中所介绍的一维光学边缘检测方法对该图案进行边缘检测, 检测结果如图3(b)—(d)所示.而各图中右上方小图即为的各自的一维P-B 相位光栅, 光栅周期T分别为 4, 2, 1 mm.其中红色线条为超表面的光轴分布, 光轴分布函数ϕ(x,y)= πx/T.将其中的“学”字进行放大观测, 可以明显看出, 在y轴方向存在着大量的边缘信息丢失, 这是由于该方法仅仅是让LHCP与RHCP在x方向存在相对位移, 而y方向没有相对位移, 第二块检偏器将y方向所有信息一并滤除, 导致了y方向的边缘信息丢失.因此, 选择光轴分布的函数为的环形光栅式P-B相位超表面对入射光场进行边缘检测, 其光轴分布如图3(e)—(f)右下角小图所示.将两种条件下的边缘检测结果进行比较, 可以明显看出, 使用光轴分布函数为的超表面可以很好的得到图案所有边缘信息, 不存在信息丢失, 达到二维边缘检测效果.此外, 我们还分析了不同周期对一维与二维边缘检测的影响.在一维边缘检测的情况下, 由图3(b)—(d)左上方放大的“学”字图案我们可以清楚的发现, 随着周期的增大, 得到的边缘厚度增加, 边缘信息分辨率降低.但是这种情况并不能完全适用于二维边缘检测, 从图中结果可以看出, 随着周期增大, 边缘信息变得模糊, 并且存在边缘信息丢失.这是由于在一维情况下, LHCP与RHCP向两个相反的方向进行位移, 其重叠部分相位差相同, 合成线偏振后偏振方向一致, 可以被检偏器完全消光.但是在二维边缘检测时, 其LHCP与RHCP两个分量在径向进行分离, 随着周期的增大, 径向相对位移增大, 重叠部分中LHCP与RHCP的相位差不完全一致, 进而导致合成线偏振后各位置偏振方向不一致, 检偏器不能将重叠部分完全消光, 使得图案边缘信息变得模糊.因此, 进行二维检测时, 为了使边缘信息尽可能的完整、清晰, 我们选择使用周期T= 4 mm.
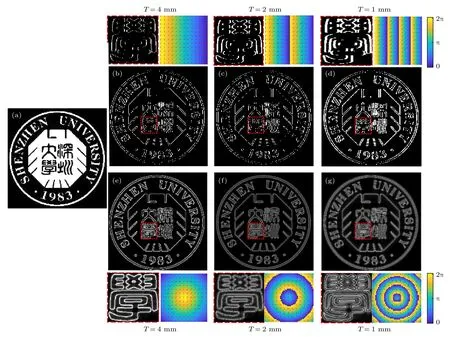
图3 (a) 深圳大学校徽掩模板; (b)−(d)周期 T = 4 mm, 2 mm, 1 mm 时, 一维边缘检测效果; (e)−(g)周期 T = 4 mm, 2 mm,1 mm时二维边缘检测效果Fig.3.(a) The mask used in the simulation; (b)−(d) the result of 1D edge extraction when the period T = 4 mm, 2 mm, 1 mm;(e)−(g) the result of 2D edge extraction when the period T = 4 mm, 2 mm, 1 mm.
为了进一步研究边缘信息分辨率与超表面光轴排布两者之间的关系, 对光轴分布函数中r的幂指数进行了研究.我们选择3种不同的光轴分布函数, 其中包括ϕ(x,y)= πr2,ϕ(x,y)= πr,ϕ(x,y)=.为控制变量并使边缘信息尽可能完整、清晰,需要保持3种分布函数的周期一致, 且周期T均为4 mm.这里选用如图4(a)所示不同旋转角度的正方形作为掩膜板, 其中4个正方形的旋转角度依次为 0°, 22.5°, 45°, 67.5°.LHCP 通过超表面后的相位分布如图4(b)—(d)中所示, 图中红色短线为超表面的快轴分布.由图4(e)—(g)中的结果可以看出, 随着r的幂指数降低, 在相同周期情况下,二维边缘信息的分辨率分别为 9.5, 4.7, 4.2 µm.这是由于随着r幂指数的降低, 同样的周期下像移∆减小, 即LHCP与RHCP的相对位移的减少, 进而使得边缘信息分辨率提升.此外, 随着光轴分布函数r的幂指数降低, 其外侧的相位变化率降低,相同周期情况下, 中间部分LHCP与RHCP的相位差变化更小.导致中间重叠部分的偏振变化率降低, 检偏器滤光效果得到提升, 使得边缘检测结果的对比度得到提升.当y方向线偏振光(LHCP与RHCP两个分量的相位差为 π )作为入射光通过超表面后传播0.1 m后, LHCP与RHCP的相位差变化如图4(h)—(j)所示.由于通过超表面后, 需要使用光轴方向为x的检偏器进行检偏, 即LHCP与RHCP两个分量的相位差为0的光被滤出.从图中可以看出, 随着光轴分布函数r的幂指数降低, LHCP与RHCP相位差为0的区域越窄, 且相位差变化梯度更陡.这也进一步验证了边缘检测结果分辨率的对比度提升与光轴分布函数r的幂指数成正比关系.一维边缘检测主要是通过改变一维光栅的周期来控制边缘信息的分辨率, 与这种方式不同的是, 二维边缘信息的分辨率可以通过控制光轴分布函数中r的幂指数来调节.
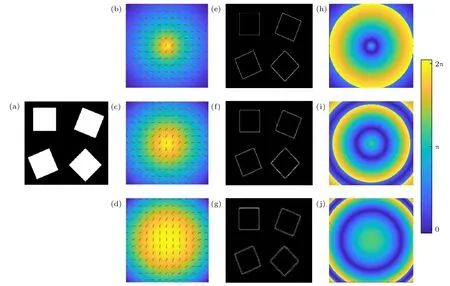
图4 (a)形状不同的正方形掩膜板; (b)−(d)超表面的快轴分布以及LHCP通过超表面后的相位分布; (e)−(g)不同光轴分布的超表面实现边缘提取效果; (h)−(j)经过传输距离为0.1 m后LHCP和RHCP的相位差分布Fig.4.(a) Mask patterns of different squre; (b)−(d) metasurface fast-axis distributions and phase distributions of LHCP after metasurface; (e)−(g) results of the edge extraction with different Metasurface fast-axis distributions; (h)−(j) phase difference distributions of LHCP and RHCP at 0.1 m transmission distance.
此外, 本文还对不同排布方式下的P-B超表面边缘检测系统的传递函数进行了计算, 并分别绘制x= 0与y= 0两种情况下的光谱传递函数曲线.根据光谱传递函数的定义,H(k)=Eout(k)/Ein(k) ,其中Eout(k) 为输出频谱面的光场分布,Ein(k) 为输入频谱面的光场分布.如图5所示, 对于一维边缘检测系统(蓝色曲线)而言, 其仅在一个方向上为典型的边缘检测传递函数曲线(中间部分传递函数为零, 边缘部分趋于1).而对于我们所设计的二维边缘检测系统, 由于超表面关于中心点对称, 不同角度下径向的传递函数一致, 因此x与y方向过中心点的传递函数曲线一致, 其两个方向上均显示出很好的边缘检测效果.并且随着r幂指数的降低,传递函数曲线变得更加陡峭, 表明检测系统的分辨率得到了提升, 进一步验证了前面的结论.
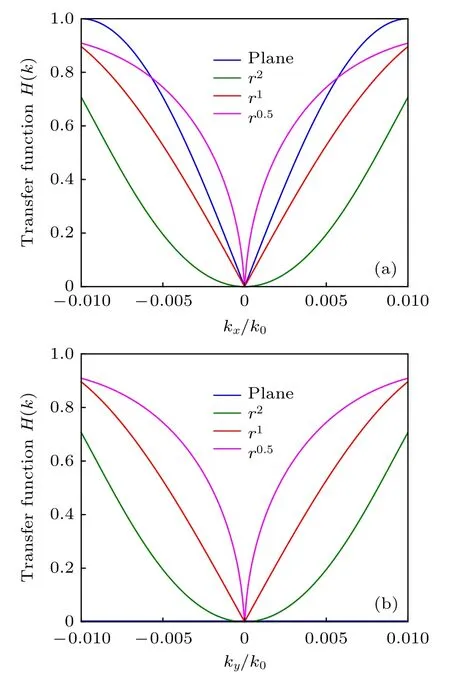
图5 幂指数不同的光轴分布函数分别在x与y方向上的空间传递函数Fig.5.Spatial spectral transfer function of the optical axis distribution functions with different power exponent in the x- and y- direction respectively.
4 讨 论
上述研究结果表明, 利用P-B相位型超表面对入射光左右旋圆偏振响应不同的特点, 将超表面光轴分布设置为环状光栅式排列, 可以在光学层面上提取图像的二维边缘信息.利用P-B相位超表面对LHCP与RHCP分量的光学相位响应不同,且响应相位互相共轭的特点, 将超表面的光轴设置为与相关的排布方式.使得入射光的LHCP与RHCP两个分量在径向进行分离, 而后使用检偏器将LHCP与RHCP重叠部分合成的线偏振光消光, 实现边缘信息检测.由于LHCP与RHCP在径向发生相对位移, 通过检偏器消光后留下的光强中同时包含了x与y两个方向的边缘信息, 达到了二维边缘提取的效果.与一维边缘检测不同的是, 二维边缘检测中环形光栅的周期不宜取太大.若周期增大, LHCP与RHCP在径向的相对位移便会增大, LHCP与RHCP的半径差增大.在LHCP与RHCP的相位变化周期一致的情况下, 若LHCP与RHCP的半径差变大, 其重叠部分的相位差变化率增加.LHCP与RHCP合成线偏振后其偏振方向与两分量之间的相对相位差有关, 相位差不是一个定值, 会导致合成的线偏振光的偏振方向不一致.使得检偏器无法将重叠部分的光完全消光, 进而导致得到的二维边缘信息变得模糊.此外, 本文还就二维边缘检测超表面的光轴分布函数对边缘信息分辨率的影响作了进一步的研究.研究发现, 在相同周期的情况下, 边缘分辨率与光轴分布函数r的幂指数有关,r的幂指数越小,边缘分辨率越高.
相较于传统数字图像处理的方法获取图像边缘信息, 基于P-B相位超表面获取二维边缘信息的方法处理速度与可处理数据大小都得到了巨大的提升, 并且结合了超表面小型化的优点, 可以很好的获得完整、清晰、边缘分辨率可调的二维边缘信息, 在全光信息处理方面有着巨大的潜力.尽管本文只是对基于P-B相位超表面的二维边缘提取进行了理论模拟, 但是这种P-B相位超表面的器件加工制备方法已经得到了广泛的应用[27,28], 在实际加工中不存在技术难题.此外, 对物体进行层状扫描成像, 得到各层的边缘信息后进行组合, 还可以进一步得到物体的三维边缘信息.
5 结 论
本文提出并设计了一种基于P-B相位超表面的二维光学差分器, 并验证了该器件可以用于检测光学图像的二维边缘信息.利用P-B相位超表面将LHCP与RHCP进行径向分离, 并将重叠部分的线偏振消光后, 实现了对物体的二维边缘检测.此外, 还分析了不同排布方式下超表面检测系统的光谱传递函数, 以此分析超表面微结构排布方式对边缘信息分辨率的影响.结果显示二维边缘信息的分辨率与超表面光轴分布函数r的幂指数成反比例关系, 可以通过调节r的幂指数来达到调节二维边缘信息分辨率的目的.由于这种二维边缘检测方法是基于不同偏振之间的相互作用, 我们预计这种超表面将会在超快光学计算与光学图像处理方面得广泛的应用.
猜你喜欢
聊城大学学报(自然科学版)(2022年4期)2022-08-22
成都信息工程大学学报(2022年2期)2022-06-14
国际太空(2022年1期)2022-03-09
中学生数理化·高一版(2021年3期)2021-06-09
航空发动机(2021年1期)2021-05-22
摄影之友(2020年12期)2020-12-23
电子制作(2019年12期)2019-07-16
电脑爱好者(2018年17期)2018-11-05
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23