
陀螺仪在长距离跨海地铁隧道定向测量中的应用
2020-01-14 06:55胡玉祥岳阳张洪德孟庆年陈鹏
城市勘测 2019年6期
胡玉祥,岳阳,张洪德,孟庆年,陈鹏,3
(1.青岛市勘察测绘研究院,山东 青岛 266032; 2.青岛市地铁一号线有限公司,山东 青岛 266021;3.青岛市西海岸基础地理信息中心有限公司,山东 青岛 266000; 4.青岛地铁集团有限公司,山东 青岛 266021)
1 引 言
地铁隧道施工一般采用两个或多个相向或对向掘井的工作面同时进行,如何让其按照预定的地点准确贯通非常重要,而隧道掘进过程中的方位控制是保证隧道顺利贯通的前提条件。如何引入高精度的坐标方位角对保证隧道在水平面内顺利贯通意义重大,传统的测量方式是通过精密导线引测至洞内,但这钟方法有其缺点,其精度随着距离的增长而降低,对于长距离隧道掘进,为保证顺利贯通,需要提供高精度的地下起始方位角,在长距离隧道开挖过程中加测陀螺边可有效保证地下起始方位的准确性和有效性。
陀螺仪是一种将陀螺仪和经纬仪结合在一起的仪器。它利用陀螺仪本身的物理特性及地球自转的影响,实现自动寻找真北方向,从而可测定地面和地下工程中任意测站的大地方位角,它不受时间和环境条件的限制,可以实现快速寻北定向。本文采用逆转点法陀螺仪定向方法,首先介绍陀螺仪的定向原理和数据处理数学模型,结合青岛市勘察测绘研究院GYRO1X陀螺仪在青岛地铁1号线长距离跨海隧道定向测量中应用,将定向测量结果与精密导线结果进行对比分析,验证GYRO1X陀螺仪在青岛地铁1号线长距离跨海隧道定向测量的有效性。
2 长距离隧道定向方法
目前,隧道定向测量常用的方法[1,3]主要有导线测量法、联系测量法以及陀螺定向法。对于长距离隧道定向测量,传统导线测量方法有其局限性[4],因而延伸出双导线测量方法[4]。联系测量分为一井定向和两井定向,一井定向和两井定向往往结合使用,通常开挖初始阶段通过开挖竖井进行一井定向,将地面上的方位和坐标传递到地下,指导隧道的开挖;当开挖到一定程度,如有条件,可通过在区间开挖风井方式进行两井定向校正坐标和方位,由于两井定向的精度远远高于一井定向,因而在长距离隧道定向中使用较多[4]。随着陀螺仪的出现和发展,在长距离隧道定向中往往进行陀螺定向。由于青岛地铁1号线横穿海底,通过传统风井方式进行两井定向不现实,传统导线测量方式随着导线布设的增长而误差积累,以下将通过具体的公式给出解释,说明青岛地铁1号线陀螺定向的必要性。
2.1 导线测量定向
传统导线测量方式是布设导线网通过斜井方式将地面上的方位和坐标引入地下,用于指导隧道施工。导线通常布设为支导线,由于单导线测量观测量少,缺少有效的检核,出现错误往往难以及时发现,因而在单导线基础上加以改进,形成了现在普遍使用的双导线[4],然而双导线从本质上讲依旧是支导线测量方式。支导线测量引起的最远点位误差[4]为:
依据式(1)可知,边长测量误差主要与导线的形状、终点距起始点距离有关,而角度测量误差源较复杂,对地下导线测量的影响较大,当地下导线敷设为近似等边直伸形支导线时,式(1)可简化为
(2)
由式(2)可知,随着距离的增加,测角和测边对导线测量的影响变大,误差逐渐积累,随着隧道开挖的增长,近开挖面的导线边方位角和坐标精度较差,尤其对于长距离隧道开挖影响明显。
2.2 联系测量定向
两井定向测量和一井定向一样,由投点、井上连接和井下连接3个部分组成[4]。井下连接导线某一边方位角总误差为:
(3)
式中θ为投向误差。投向误差主要由垂球线间距以及投点设备决定,现在投点设备已经非常先进,对投点误差的影响较小,而对于两井定向,垂球线间的距离很大,投向误差对定向精度的影响已经很小了,暂不考虑。
联系测量受投点误差、井上连接误差和井下连接误差的影响,因而联系测量方式进行隧道定向测量受限制因素多,影响联系测量的因素较多。有的地方受施工条件的限制,往往不能满足布设两井定向导线的条件,布设一井定向导线精度受限制条件较大,对于长距离隧道定向,单纯采用一井定向方式不可取。
2.3 陀螺定向
随着陀螺仪的发展,陀螺仪应用越来越广泛。陀螺仪是一种使用陀螺自身的物理特性和地球自转的影响,实现快速寻北的定向测量方法,此种方法受外界影响较小,且操作简单,因而在长距离隧道定向测量中应用效果较好。
3 陀螺定向测量
通过上面的论述,陀螺定向测量方法特别适合青岛地铁1号线过海隧道的定向测量工作。本章以青岛市勘察测绘研究院GYRO1X陀螺仪为例,结合地铁1号线过海隧道,介绍陀螺仪的定向测量过程,介绍内业计算中用到的三北方向等相关理论。
3.1 定向测量过程
地铁1号线过海段是连接黄岛区和青岛市区的重要组成部分,在黄岛区设立两座施工斜井,在市区设立1座施工斜井。如图1所示,由施工1#斜井已开挖至贯通面处,由2#施工斜井开挖至贯通面处还有 120 m,隧道距离海平面最低 88 m。采用陀螺仪的定向测量方法可分为陀螺仪定向的作业过程和一次测定陀螺方位角的作业过程。

图1 1号线过海段隧道陀螺定向测量示意图
(1)陀螺仪定向的作业过程
①在地面已知边JD1064-SD08上测定陀螺仪器常数;
②在地下待定边WGDXZ12—WGDXY11上测量陀螺方位角;
③在地面已知边JD1064-SD08上重新测量仪器常数;
④求算已知边JD1064-SD08子午线收敛角;
⑤求算待定边WGDXZ12—WGDXY11的坐标方位角。
(2)陀螺方位角的一次测量作业过程
在地面已知边上测定仪器常数及待定边上测定陀螺方位角均需进行多次,而每次作业过程是相同的。该作业过程称为陀螺方位角的一次测定。
①在测站上整平对中陀螺仪,以一个测回测定待定边或已知边的方向值。然后将仪器大致对正北向;
②粗略定向(测定近似北方向):常用的方法有罗盘法、已知方位角法、两逆转点法、四分之一周期法等,本文使用两逆转点法进行粗略定向;锁紧灵敏部,启动陀螺马达,待达到额定转速后,下方陀螺灵敏部,用粗略定向的方法测定近似北方向。完毕后制动陀螺并托起锁紧,将望远镜视准轴转到近似北方向位置,固定照准部;
③测前悬带零位观测;打开陀螺照明,下方陀螺灵敏部,进行测前悬带零位观测,零位观测完毕,托起并锁紧灵敏部;
④精密定向(精密测定陀螺北):常用的方法有逆转点法、中天法、时差法、摆幅法等,本文使用逆转点法进行精密定向;
⑤测后悬带零位观测;
⑥以一个测回测定待定边或已知边的方向值;取测前测后观测值的平均值作为测线方向值。
3.2 方位角计算
由于陀螺仪轴与望远镜光轴及观测目镜分划板零线所代表的光轴因安装或调整不完善,使上述三轴不在同一竖直面内,所以陀螺仪轴的稳定位置通常不与地理子午线重合,两者的夹角称为仪器常数(用△表示)。如果陀螺仪稳定位置位于地理子午线的东边,△为正;反之,则为负(如图2所示)。进行陀螺定向时,首先在已知边(已知方位角的精密导线边或三角网边)上测定仪器常数2~3次。如图2,CD边已知地理方位角为A0,测得的陀螺方位角为αT,则可得到仪器常数:
△=A0-αT
(4)
一般地面精密导线边或三角网边已知的是坐标方位角α0,而不是地理方位角A0,因此还需要求子午线收敛角γ0,子午线收敛角在中央子午线以东为正,以西为负。地理方位角和坐标方位角的关系为:
A0=α0+γ0
(5)
子午线收敛角γ0可由查表法求得,也可以根据公式求出,公式为:
γ0=△L×sinB
(6)
式中,△L=L-L0,L为对应点的中央子午线经度,L0为相应投影带中央子午线经度。
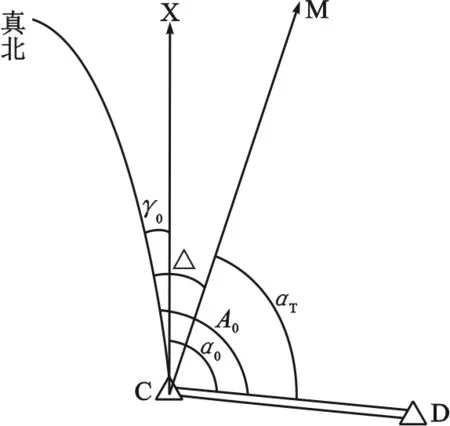
图2 各方位角及仪器常数关系图
根据在同一边上多次测量的陀螺方位角评定一次测定中误差:
(7)
式中:v-同一边陀螺方位角的平均值与一测回测定值的差数;
n-测量陀螺方位角的次数。
4 工程应用
青岛地铁1号线过海段全长3.5 km,是连接黄岛和城区的关键环节。过海段在黄岛侧设立两座施工斜井,在市区段设立一座施工斜井,由两侧对向开挖,目前由黄岛侧已开挖至贯通面,市区段开挖距离贯通面还有 120 m,为保证过海段顺利贯通,青岛市勘察测绘研究院使用索佳陀螺仪GYRO1X对地铁1号线2标段地下导线边(WGDXZ12—WGDXY11)进行陀螺定向测量,求得WGDXZ12—WGDXY11边的坐标方位角,并与通过导线测量方式得到的坐标方位角进行对比分析。
4.1 外业测量及记录
外业测量遵循“地面-地下-地面”的顺序,首先在地面架站JD1064、SD08作为置镜后视点,测得陀螺仪在地面上的仪器常数,然后在地下寻找真北方向,根据仪器常数测得WGDXZ12—WGDXY11边的陀螺方位角,再次在地面架站,在此求得陀螺仪的仪器常数,取两次仪器常数的均值作为最终值,根据以上方位角计算方法求得地下边的坐标方位角。

架站JD1064、置镜点SD08测量结果(地面) 表1

架站WGDXZ12、置镜WGDXY11测量结果(地下) 表2

架站JD1064、置镜点SD08测量结果(地面) 表3
4.2 内业计算
根据地面已知点的平面坐标计算地面已知边坐标方位角,结果如下:
JD1064——SD08:251°03′01.16″
由查表法或者根据式(6)计算JD1064、WGDXZ12的子午线收敛角,结果如下:
JD1064:10′17.05″;
WGDXZ12:10′05.48″;
由地面已知导线边JD1064—SD08计算陀螺仪仪器常数为:35.04″
由算得的仪器常数,结合坐标方位角和陀螺方位角的关系,求得地下边的坐标方位角:
WGDXZ12—WGDXY11:177°02′48.23″。
4.3 结果对比
根据《城市轨道交通工程测量规范》(GB/T 50308-2017)规定:当隧道单向掘进超过 1.5 km时应加测陀螺边,使用的陀螺仪标称精度不低于15″,陀螺方位角较差不大于20″。通过以上表1~表3可知,方位角较差满足要求。

结果对比表 表4
由表4可知,通过陀螺仪定向测量得到的坐标方位角与导线测量方式得到的方位角较差为11.72″,以陀螺仪定向中误差的2倍作为极限误差,以上结果表明陀螺仪定向测量结果良好。
5 结 论
作为国内第一条跨海地铁线路,如何保证青岛地铁1号线长距离跨海段的顺利贯通意义重大。本文在总结常用隧道定向测量方法的基础上,探讨传统定向测量方法的优缺点,分析将陀螺仪应用于长距离隧道定向测量中的必要性,结合青岛市勘察测绘研究院实际应用的陀螺仪,介绍陀螺仪基本工作原理以及方位角计算的基础理论,将青岛市勘察测绘研究院陀螺仪用于过海段定向测量中,采用逆转点法进行陀螺定向测量。最后将陀螺仪定向测量结果与传统导线测量结果进行对比,结果表明:青岛市勘察测绘研究院陀螺仪精度良好,可作为导线测量的有效检核手段,特别适用于长距离隧道定向测量中。
猜你喜欢
结构工程师(2022年2期)2022-07-15
北京航空航天大学学报(2021年9期)2021-11-02
空间科学学报(2020年4期)2020-04-22
家庭影院技术(2019年11期)2019-12-09
现代计算机(2018年19期)2018-08-01
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
家庭影院技术(2017年12期)2017-02-06
山东工业技术(2016年15期)2016-12-01
