
GNSS三维水道观测中动态测高精度控制及分析
2020-01-11 08:39杨波杨松张振军王正洋
水利水电快报 2020年12期
杨波 杨松 张振军 王正洋
摘要:为实现水深测量数据的精度控制,基于GNSS三维水道观测技术的原理,通过解析基于Hypack原始文件的GNSS动态定位信息数据,采取相关滤波算法,获取了高精度动态测高数据,并进行了实例应用分析。选取荆江河段流市河弯段水深测量数据,对比分析了GNSS三维水道观测的动态测高精度。结果表明,测量精度满足GNSS三维水道观测要求,值得推广应用。
关键词:动态测高;精度控制分析;Hypack原始文件;GNSS三维水道观测;荆江河段
中图法分类号:P332
文献标志码:A
文章编号:1006-0081(2020)12-0010-03
在传统水深测量过程中,需在测区范围内设置一定数量的潮位站,采用潮位、水下测点的空间坐标及时间插值方法,经过一系列潮位改正进而推算水下测点的测时水位。由于水深测量过程中受GNSS定位质量、潮位变化、涌浪、船姿态、水温与盐度等多种因素影响,导致影响水深测量数据精度的因素较多。GNSS三维水道观测技术能够消除动态吃水、涌浪、观测潮位等误差的影响,大大提高了水深测量的精度与效率,目前主要在海域、港口区域以及长江下游感潮河段应用研究较多,传统水深测量逐步被内外业一体化的GNSS三维水道观测技术所取代。因此,解析水深测量原始文件的GNSS动态定位信息数据,采取相关滤波算法,研究GNSS三维水道观测中动态测高精度的控制及分析,对于水深测量数据的精度控制十分必要。
1GNSS三维水道观测原理
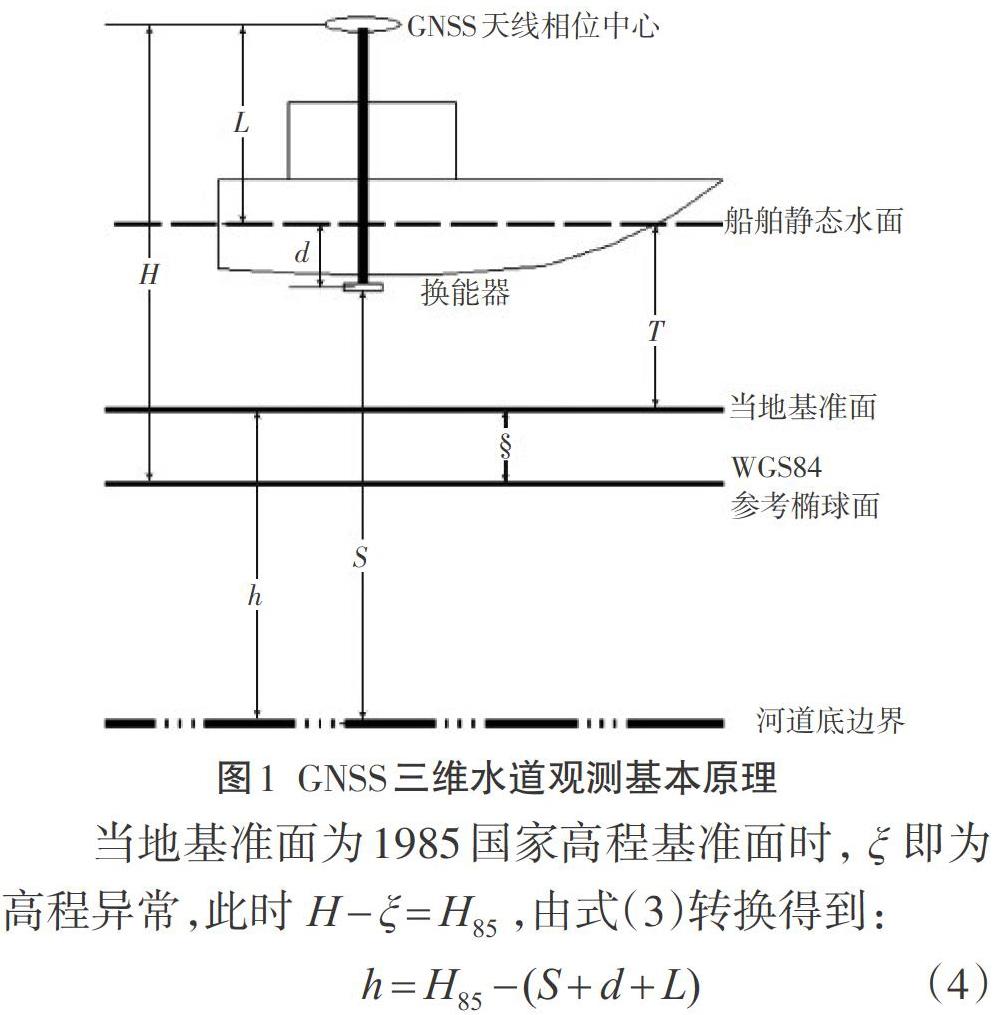
GNSS三维水道观测是利用GNSS动态测量技术、测深仪及其他附属设备实测的数据,通过实时或事后联合解算,计算出测深仪换能器声学中心的三维位置,从而获得水下测点的平面位置和高程。该方法也被称作无验潮测深、随船一体化测深等。GNSS三维水道观测的基本原理如图1所示。
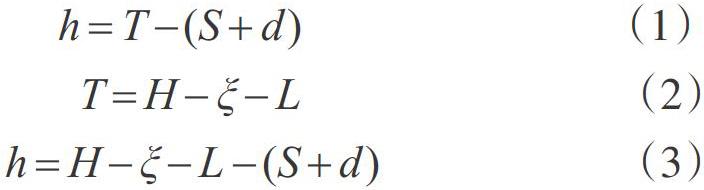
由图1可以得到以下3个关系式:
式中,H为GNSS接收机天线相位中心的WGS84大地高;L为GNSS接收机天线相位中心到水面的高度;d为换能器到水面的距离(静吃水);T为船舶静态水面到当地基准面的高度(水面高);S为换能器到河道底边界面的距离(测时水深);ξ为当地基准面到WGS84椭球面的距离;h为当地基准面下的河底高程。以上各参数单位均为m。
由于d+L为固定值(钢卷尺丈量),S为测时水深,若GNSS接收机实时采集到1985国家高程基准面下的正常高,便可实时测得1985国家高程基准的河底高程。因此,GNSS三维水道观测技术的关键在于获取准确高精度的GNSS天线相位中心正常高。
2动态测高精度控制方法
GNSS三维水道观测技术的重点在于动态获取GNSS接收机采集到某瞬时测点位置的下正常高。需运用GNSS差分定位技术,测得定位时刻天线的WGS84大地高,再根据测区的高程转换模型(似大地水准面精化模型、七参数转换模型、曲面拟合模型等)实现从大地高向正常高的转换。因此,GNSS的定位质量、精度对最终计算成果的质量有着直接关系。
2.1大地高转换模型的精度控制
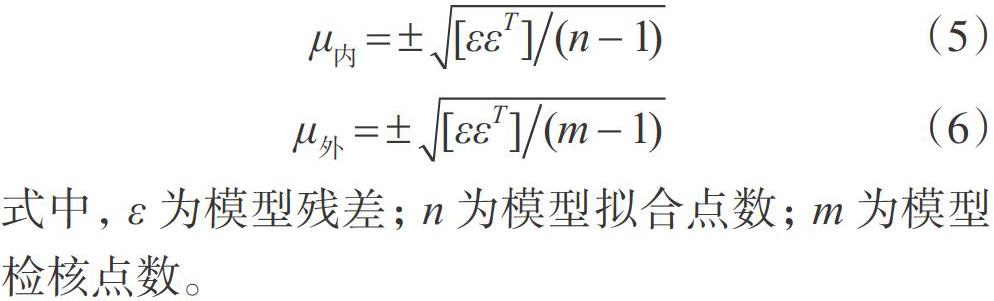
GNSS动态获取WGS84大地高,大地高向正常高进行高程转换的模型可采用似大地水准面精化模型、七参数转换模型或者曲面拟合模型。模型的拟合精度和效果取决于控制测量精度、拟合点的分布和范围大小等因素,可采用内符合精度μ内和外符合精度μ外检验评价拟合精度。
2.2GNSS动态测高定位数据质量控制
目前,Hypack软件可连接GNSS、测深仪、侧扫声纳、罗经等不同设备,集成系统后进行水深测量数据的采集,存储为RAW格式文件,其字段解释见表1。
在实际应用中,GNSS接收机观测数据难免会受到多种因素的影响,包括信号传播环境的不确定性、卫星及用户设备的运行故障、水域环境以及操作人员不规范等,使得GNSS三维水道观测中定位质量无法控制。解析GNSS接收机存储定位信息的GGA数据格式(见表2),可在字段7中获取水深测量过程中GNSS接收机的定位质量状态,进而对采用GNSS动态测高方法进行质量控制。
2.3动态测高数据滤波
根据SL 257-2017《水道观测规范》附录A.3.6规定,GNSS三维水道观测中GNSS数据更新率应不小于10Hz,即间隔0.1s存储一行GGA数据,而GNSS三维水道观测时所需的动态高为定位与测深同步时刻的GNSS接收机天线瞬时正常高。受水深测量过程中信号遮挡、干扰等影响,有时会存在较大的系统噪声和量测噪声,影响GNSS定位质量控制,进而导致某些测点并未获取瞬时正常高,以及导致某些测点附近的动态测高数据存在一定数量的噪点。
因此,通过滤波算法去除动态测高过程中的部分噪点,可保留真实的GNSS接收机动态测高变化过程。开发动态测高数据滤波软件界面见图2。
3精度分析
评价GNSS三维水深测量动态测高的正确性及可靠性,一种有效和直观的方式是在测区内布设合适的临时潮位站,比较人工观测进行潮位改正后水下测点的水面高与GNSS三维水道观测动态获取水面高差值,并进行统计分析。
选取荆江河段涴市河弯段作为试验测区,河段长度约为17.2km,在该河段共布设20个临时潮位站,按照单波束方法进行施测,共计施测56309个水深测点。采用潮位站推算的水深测点水面高与GNSS三维水道观测计算水面高差值进行了统计,详见表3和图3。
结果表明:整个试验河段,潮位站推算水面高与GNSS三维水道观测计算水面高的差值为△,其中-0.1≤△≤0.1的测点占总测点数的99.6%,大于0.1的占总测点数的0.4%,完全滿足《水道观测规范》附录A中“互差小于或等于0.10m的点数占比对总点数的80%,互差小于或等于0.20m的点数占比对总点数的95%”的规定。
4结语
本文针对GNSS三维水道观测技术中动态测高精度的质量控制方法,通过解析GNSS定位质量数据信息,控制动态测高质量,再应用数据平均误差阈值法滤波水深测量定标时的漂点及空白点,保留真实的水面高数据。结合工程实践在荆江河段涴市河弯段进行了对比验证,结果表明该方法可满足GNSS三维水道观测的规定要求,可推广应用。
(编辑:李晓濛)
