
空间碎片目标在轨实时监测处理方法
2020-01-02 08:00:40李宗凌汪路元禹霁阳蒋帅吴雨航
航天器工程 2019年6期
李宗凌 汪路元 禹霁阳 蒋帅 吴雨航
(北京空间飞行器总体设计部,北京 100094)
随着人类航天活动的增加,空间碎片会日益增加,仅美国空间目标监视系统编目和记录的直径大于5 cm的空间碎片累计就达38 000多个[1]。随着时间推移,这些空间碎片可能会对在轨航天器造成不可估量的影响,如果空间碎片与在轨航天器发生碰撞,将会直接导致其损坏或者解体。此外,空间碎片再入大气层,还将给人类带来不可估量的灾难。因此,有效快速地对空间碎片进行监测、管理和预报是构建太空安全环境的基石,已经成为各个航天大国的研究热点。
空间目标监测平台主要分为地基和天基两种。由于不受体积、质量等因素的限制,地基观测平台可以实现较高的空间分辨率和较远的观测距离。我国的地基空间目标监视系统受布站区域的限制,不能实现对空间目标的全覆盖,而且存在监视的实时性不高和对中小尺寸碎片的探测能力有限的问题,因此,迫切需要天基监视手段去弥补[2]。相比于地基平台,天基观测平台最大的优势是可以在地球大气层外的空间轨道上运行,进而不受国界、空域和气象条件的限制,同时,天基观测不受地球大气的影响,具有较高的灵敏性,可以减少光学可见期的影响,从而增加观测时间。因此,天基观测更可能获取长时间广范围的观测数据,满足我国国情及发展需要。
近些年来,基于天基平台的空间目标观测受到广泛的关注[3]。文献[4]提出了一种可同时实现三波段探测的多光谱光学载荷相机系统,可满足天基空间碎片观测系统需求。文献[5]对空间碎片光谱特性进行研究,可以用来获取碎片材料等信息。文献[6]刻画并分析了天基观测的系统误差,设计相应方法有效抑制了观测和模型结构误差对观测精度的影响。文献[7]研究了信息处理技术在天基碎片观测系统中的应用,文献[8]针对地球同步卫星定轨,提出了利用鲁棒性估计方法消除异常测量值的影响。
空间碎片目标在轨实时监测的核心是“快”、“准”、“稳”,其中“快”是指实时,“准”是指高准确率、低虚警率,“稳”是指应对复杂背景。地面已有的信息处理、目标检测跟踪方法面临巨大挑战,无法满足天基应用需求。针对上述问题和需求,本文提出了一种空间碎片目标在轨实时监测处理方法,主要实现面向空间碎片监测的光学载荷数据的实时处理,将在轨实时处理得到的目标检测结果、天文位置等结果发送到数据传输系统下传给用户,实现空间碎片目标快速定位和管理。
1 在轨实时监测系统
1.1 系统设计
在轨实时监测系统主要包含卫星平台、载荷、数据传输和信息处理等功能单元,通过在轨实时处理技术,快速从载荷数据中提取空间碎片目标位置、亮度等信息,针对重点目标完成在轨自动跟踪和确认,并将处理结果下传至地面,进一步对目标进行编目和确认管理。具体流程(图1)如下:载荷信息处理单元从相机载荷获取原始数据进行缓存,对于缓存的全部数据进行图像数据压缩,然后进行碎片目标检测、跟踪和天文定位,压缩码流和处理结果返回给数据传输系统。载荷信息处理单元可以从平台获取姿态轨道等辅助数据,用于碎片提取和定位计算。
1.2 信息处理平台设计
考虑卫星载荷布局以及在轨持续稳定工作的需求,设计一种基于SpaceVPX标准总线的一体化信息处理架构,各功能板卡采用SpaceVPX 6U标准架构,根据需要可扩展。分机功能板卡采用主备双份冗余设计,数据接口采用交叉主备冗余设计,信息处理平台各模块的分工如表1所示。
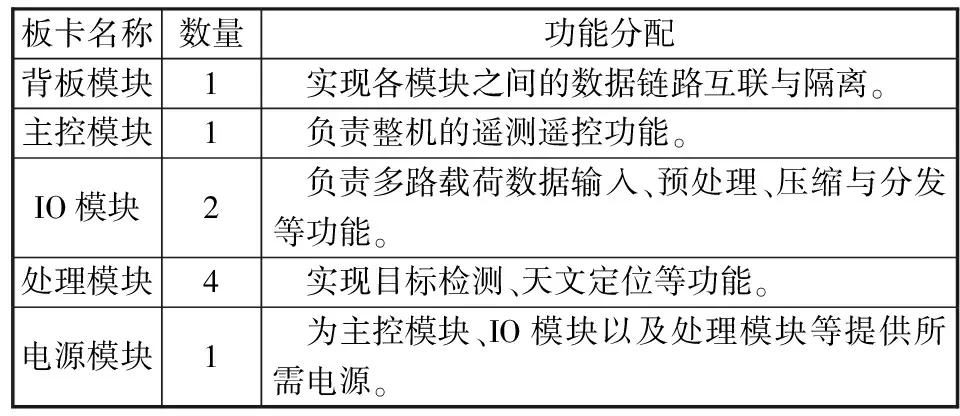
表1 信息处理平台组成
2 空间碎片目标在轨监测方法
2.1 空间碎片目标检测方法
2.1.1 空间碎片目标成像特性分析
星图主要由恒星、空间碎片目标和深空背景构成。星图的成像特点是在暗背景下离散分布着近似于高斯分布的点状光斑,同时星图中还夹杂着一定程度的背景噪声,且噪声成均匀分布[1]。
1)恒星目标成像特性
恒星是星图的重要组成部分。在星图中为点状,受成像条件的影响,恒星表现为向四周弥散的一个近似对称的高斯分布的亮斑,点源成像的光度分布函数又称为点扩散函数。点扩散函数对图像的作用在数学上可表示为点扩散函数与图像的卷积,由于点扩散函数的不确定性,恒星亮斑包含的像素数从几个像素到几十个像素不等。在星图中,恒星成像特征与动目标的成像特征有很强的相似性,都表现为近高斯分布的亮斑,因此严重影响星图目标监测和识别的效果。
2)空间碎片目标成像特性
空间碎片目标在星图上表现为点状分布的小目标,一般占据一个或几个像素,没有明显的几何、结构信息、纹理信息等,同时由于空间目标的运动特性,空间碎片目标在序列星图中成像亮度不稳定。影响目标亮度的因素包括:空间碎片目标的尺寸、目标与传感器的距离、目标材料的反射率、太阳入射角度以及观测条件等。天基光学望远镜探测的是空间碎片目标反射的太阳光,因此,空间碎片目标来源主要是太阳辐射的可见光谱段的能量。由于不同材质、空间碎片目标的不同部分以及空间结构都会导致反射率的不同,因此,在星图序列中,空间目标的亮度存在一定程度的差异。
空间碎片目标和恒星在空域上成像相似,都表现为单帧图像上的孤立亮斑,且形状相似。在天基天文光电观测系统中,由于其口径小,视场大,探测距离远,受传感器成像分辨率的限制,空间目标在CCD焦平面上几乎为点目标成像。但由于光学系统受点扩散效应的影响,空间目标的能量弥散到相邻的多个像元上。一般情况下,可对空间碎片目标构建二维高斯拟合模型,此时点目标的能量密度在星图上的分布函数可以表示为
(1)
式中:(x0,y0)为空间目标中心位置的坐标;s为目标总亮度;σpsf为成像系统的点扩散函数的参数——扩散标准差。恒星和空间目标成像灰度分布对比如图2所示。
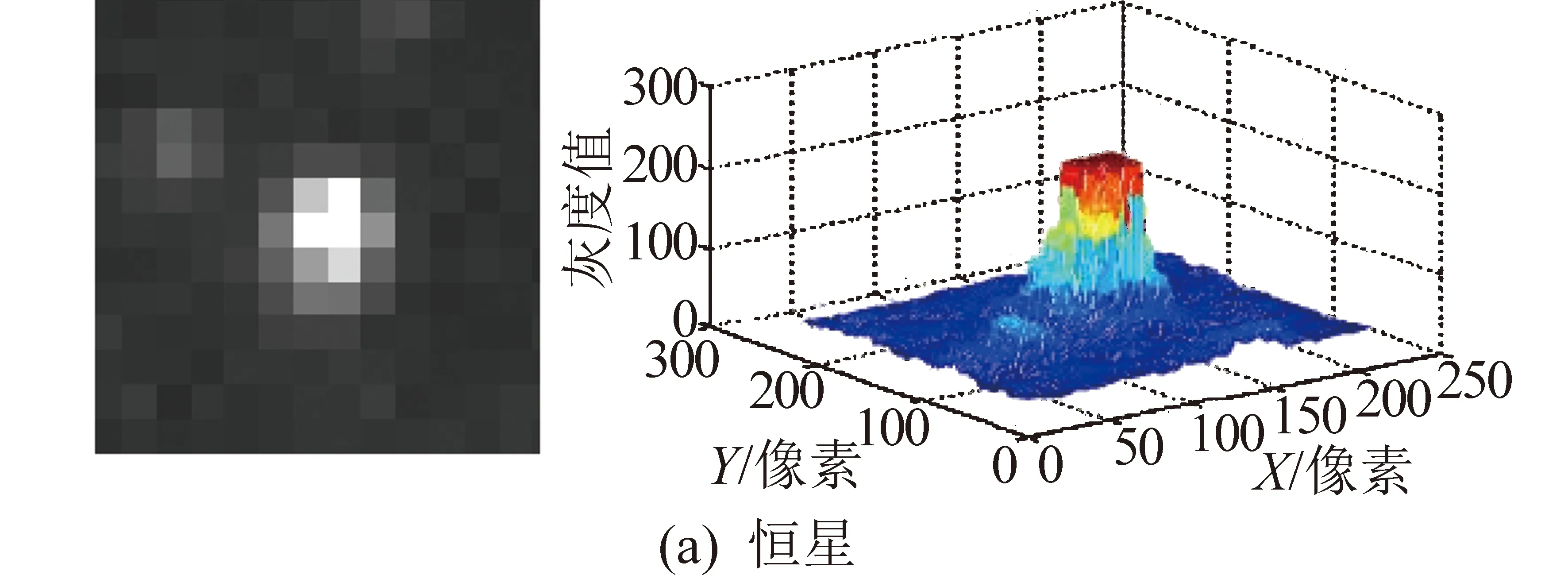
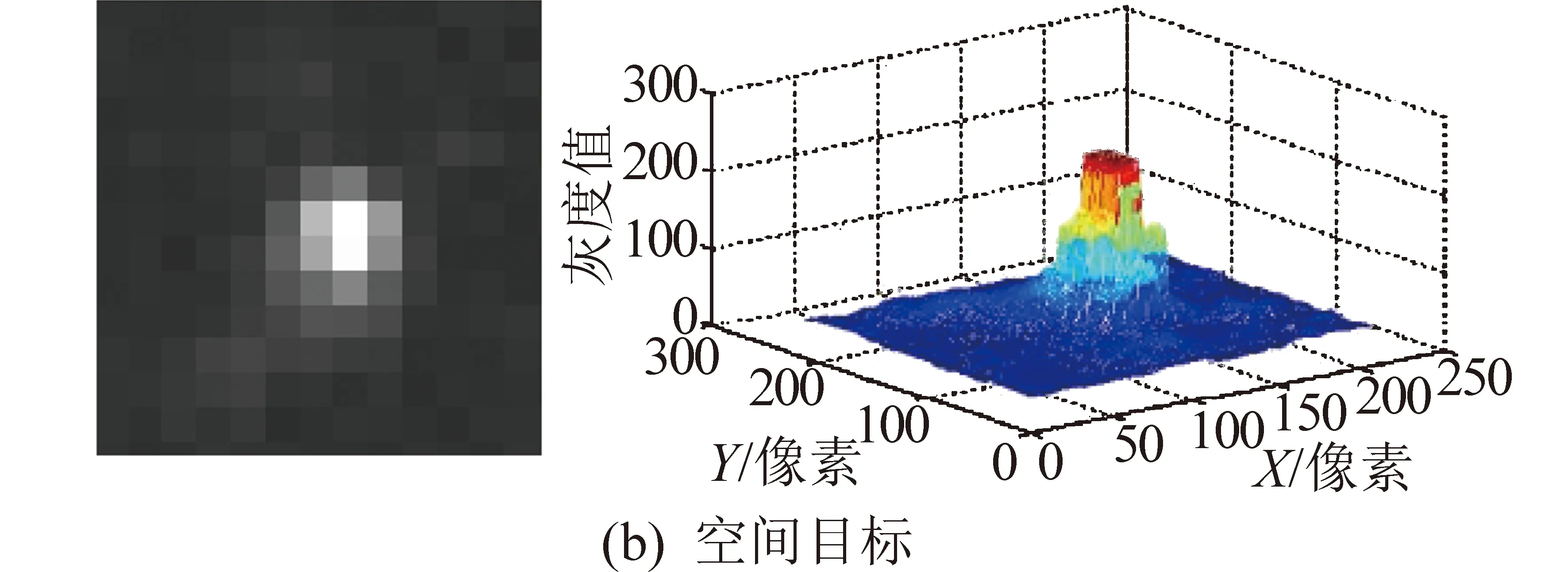
图2 恒星和空间目标成像灰度分布图
碎片目标在星图中形成光斑的亮度分布近似于二维的高斯分布,光斑中心是信号的峰值,光斑周围像素随着离中心距离的增加,亮度逐渐减弱,直至接近星图背景的亮度。
2.1.2 空间碎片目标检测算法
根据空间碎片目标的成像特性,设计一种空间碎片目标在轨实时检测算法,算法过程如图3所示。

图3 空间碎片目标检测算法过程
1)数据预处理
星图中,暗弱小目标淹没在背景噪声中,通过顶帽变换等数据预处理,达到抑制背景噪声,凸显暗弱目标,便于后续算法提取暗弱小目标的目的。其中,顶帽变换主要由1组窗大小为29×29和5×5的膨胀和腐蚀运算组成。
2)疑似目标提取
根据目标特性分析可知,空间目标中心点具有高于背景并且为局部极大值的特点。针对该特性,设定合适的窗并利用图像形态学里的膨胀操作来搜索局部最大值,若局部极值点大于高阈值则认定为疑似强目标点,若高于低阈值但低于高阈值则认定为疑似弱目标点。
3)疑似目标确认
对提取出的疑似目标点,需要判断其是否为目标。以疑似目标中心点为中心,动态设定尺度来确定窗及核函数大小。对窗内的灰度值进行归一化处理以消除光照变化造成的影响,对归一化后的窗函数及核函数进行卷积运算,若响应值大于预设阈值并且大于之前尺寸下的计算结果,则更新该点的尺寸以及响应值信息。通过恒星位置以及目标轨迹可剔除恒星、背景噪声等干扰项,具体实施方法如下。
(1)核函数设计。相较于直接地二值化处理,设计合适的核函数,可在保证目标灰度信息的情况下有效地确定目标的中心及边界。从之前分析可以知道目标呈近似高斯分布,因此针对性地设计核函数。
Kernel(x,y)=
(2)

(2)恒星目标剔除。由于检测到的目标包含目标以及恒星,为了减少后续轨迹匹配的运算量,将历史中出现过疑似目标的位置进行存储,若下一帧图像中的疑似目标在这些位置出现时,则认为是恒星,可将其从检测结果中剔除,如图4,5所示。
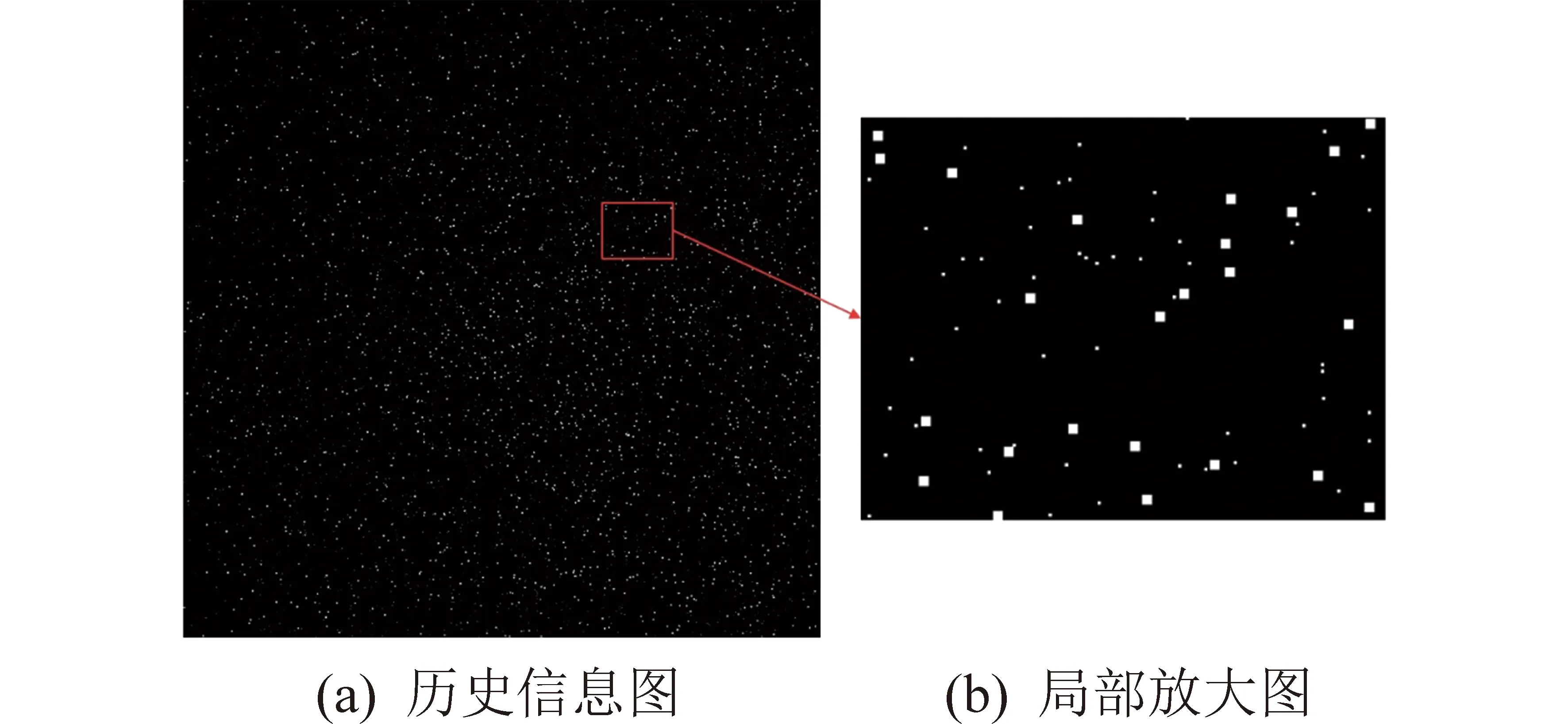
图4 匹配后的历史信息图

图5 疑似目标筛选
(3)目标轨迹关联。深空背景图像中除深空背景以外,主要由噪声、天体、航天器及碎片等构成。针对这三类目标的运动特性进行分析:噪声在图像中是杂乱无章的,没有固定的运动特性;天体目标距离拍摄器件十分遥远,在图像中的相对位置几乎保持不变;航天器和碎片目标由于其轨道特性,在图像中呈现出接近匀速直线的运动状态。针对需检测的目标与其他两类目标运动特性的不一致,通过多帧图像进行轨迹关联,可以剔除其他两类目标,筛选出需要的目标。其运动特性可表示为
(3)
式中:xi+1,yi+1表示下一帧目标的图像像素位置;xi,yi表示目标当前帧的图像像素位置;Δxk,Δyk表示目标的第k条轨迹的运动特性,即目标的运动像素距离,同一条轨迹的运动特性基本保持不变。轨迹关联方法如图6所示:①目标从第1帧根据预估的速度域在第2帧图像上搜索匹配目标;②第2帧图像上搜索匹配到目标后,计算两帧之间目标的运动特性,并根据运动特性预测目标在第3帧图像的大致范围;③在第3帧图像上的预测位置搜索目标,搜索成功后,将搜索到的目标归入同一轨迹,搜索失败后,转步骤①,直至第2帧图像中无法搜索匹配到目标;④轨迹在后续序列图像中继续搜索匹配目标,如果轨迹关联到多个点,则认为轨迹是真实存在的,否则认为轨迹是误检所形成的。
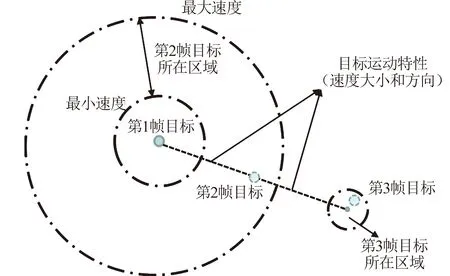
图6 轨迹关联示意图
2.2 天文定位
本文从空间目标的轨道预报算法和恒星的运动模型为基础,对空间目标天基测量天文定位的算法进行了设计,算法流程如图7所示。
天基空间碎片目标监测系统是进行空间目标监视与跟踪的重要发展方向,利用高精度轨道的天基观测平台结合光学测量手段,根据光学望远镜指向视场中恒星的位置及目标星的实时处理结果,计算出目标天文定位数据。
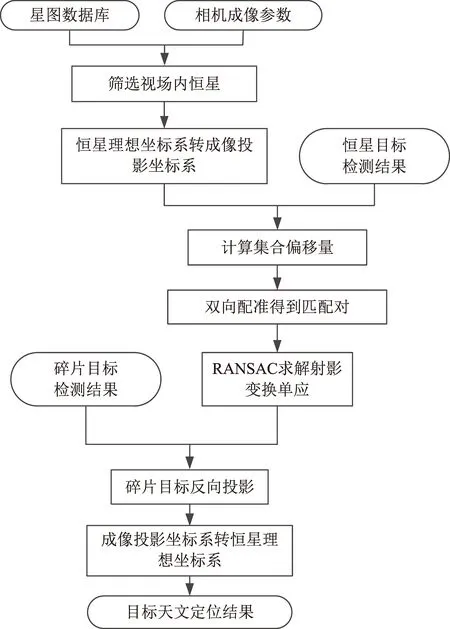
图7 天文定位算法流程
天基测量的天文定位不受国土范围、大气层、电离层的影响,而且通过姿态调整可以具备全天时探测优势,可以成为空间目标精密定轨和空间碎片编目定轨的一种有效的数据来源,对于改进空间目标轨道精度,有效节约地面测量资源发挥重要作用。基于天基光学成像的目标检测和天文定位是空间目标发现和测量的重要手段。
3 系统实现及验证
3.1 系统搭建
本文选用Xilinx公司现场可编程门阵列(FPGA)V7-690T与TI公司数字处理器(DSP)TMS320C6678,构成FPGA+2DSP的经典高性能处理架构,用以完成实时处理功能验证。结合该FPGA和DSP外围串行快速输入输出口(SRIO)、高速串行计算机扩展总线(PCIe)和第三代双沿存储器(DDR3)等高速接口,形成可演示的实时信息处理系统。其中,根据FPGA和DSP不同的架构特点,FPGA主要用于完成顶帽变换、三帧差以及标注等图像预处理工作,DSP主要用于完成疑似目标提取、确认以及天文定位等工作。
验证算法处理流程如图8所示。
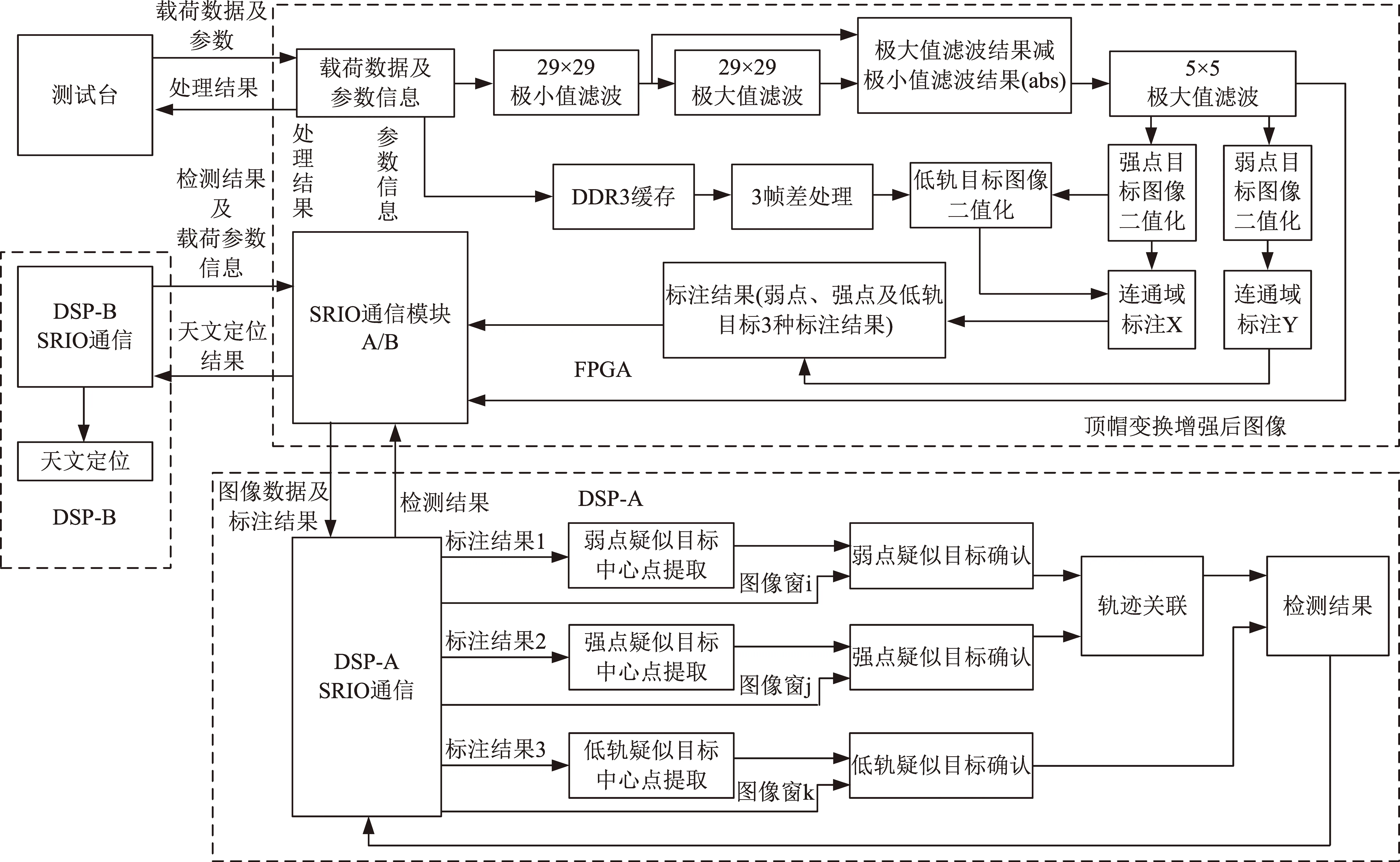
图8 验证算法处理流程
功能验证的主要流程:PC机通过PCIe总线发送参数以及图像数据给FPGA,FPGA利用DDR3缓存中间处理数据,按照算法流程完成处理后将处理结果通过PCIe总线输出给PC机进行显示。
3.2 验证结果
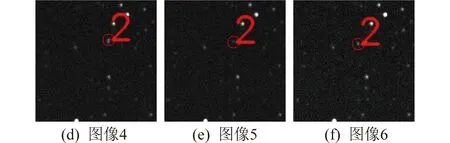
利用一组实际拍摄的星图数据对系统进行验证,具体信息如下:①图像数量9幅;②图像分辨率4096像素×4096像素;③图像大小32 MByte;④图像位数14 bit;⑤相机曝光时间0.5 s。检测结果如图9所示,图中红色圆圈为检测出的空间碎片目标。

3.3 性能分析
利用上述9幅实拍星图进行测试,得到测试结果如表2所示。

表2 测试结果
通过测试结果统计表可知:星图中包含大量无效目标,如果只是利用单幅图像中的信息无法得出正确的检测结果。因此,需要利用目标轨道运动信息(多帧关联),才能从海量的虚假信息(151 994个疑似点目标信息中只有3个有效信息)中提取真实目标信息。处理实时性方面,由于每幅图像的复杂度不同,导致单帧图像处理时间不定,在设计天基实时监测处理系统时需考虑该情况,可以在信息处理平台输入端增加大容量快速存取单元解决。针对上述9幅图像,本文设计实时处理平台平均处理速度为0.62秒/帧,处理实时性良好。
4 结束语
本文设计了一种空间碎片目标在轨实时监测处理方法,实现面向空间碎片监测的光学载荷数据的实时处理,将在轨实时处理提取的碎片信息下传给用户。针对该空间碎片目标成像特性,设计了一种满足空间应用需求的载荷数据处理单元以及空间碎片目标检测和定位方法,该信息处理单元可以完成载荷数据24小时不间断的实时处理工作,处理延迟小于1 s。
本文设计的空间碎片目标在轨实时监测处理算法流程优化、工程可实现性强、硬件资源占用合理,经由卫星在轨数据验证了算法的有效性和实时性,为星上高速率载荷数据实时处理、数据快速应用、快速提取信息提供了一种新的高效途径。该方法可应用到当前的天基实时监测处理系统中,通过在卫星上完成空间碎片目标检测和天文定位等功能将显著缩短卫星观测系统的反应时间,提高载荷利用率。随着处理实时性、有效性及能效比等指标的改善,星载信息处理单元的在轨运行时间将大为增加,能有效提升天基观测系统的效能。
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:00
国际太空(2022年1期)2022-03-09 06:04:40
空间科学学报(2021年2期)2021-07-21 08:43:40
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:24
现代装饰(2019年7期)2019-07-25 07:42:20
航天电子对抗(2019年4期)2019-06-02 08:22:50
百科探秘·航空航天(2018年12期)2018-12-29 03:57:56
奥秘(2018年10期)2018-10-25 05:38:56
电子设计工程(2014年23期)2014-02-27 12:02:22
世界科学(2013年5期)2013-03-11 18:09:29
