月面低空飞行器着陆缓冲机构设计与仿真分析
2019-12-24 07:32董小闵李军礼于建强潘成望
载人航天 2019年6期
董小闵,李军礼,于建强,潘成望,林 轻
(1.重庆大学机械工程学院,重庆400044;2.上海宇航系统工程研究所,上海201108)
1 引言
月面飞行器着陆时会承受巨大的冲击载荷,为保证着陆器安全着陆,需采用缓冲机构吸收并耗散能量[1-2]。缓冲器是着陆器缓冲机构的核心,用于吸收着陆器在着陆冲击过程中所产生的冲击能量。国际上常用的缓冲器主要有液压/气压缓冲装置。可压缩吸能缓冲装置、机械式弹簧缓冲装置。磁流变及电磁阻尼缓冲装置。磁流变缓冲器具有体积小、阻尼力在较大范围内连续可调、缓冲完成后可完全恢复即可重复使用等优势,可用于着陆缓冲器,以降低月球及深空探测任务成本、提高发射频率[3-4]。
迄今为止,国内外研究机构对月面着陆缓冲装置进行了大量研究[5]。美国的勘测者(Surveyor)探测器采用液压阻尼来实现缓冲,阿波罗(A-pollo)登月舱和苏联的部分月球(Luna)探测器分别采用蜂窝铝材料变形和金属材料变形来实现缓冲[6]。目前磁流变缓冲器的设计已趋于成熟,将磁流变缓冲器应用到月球着陆器缓冲机构上具有理论上的可行性[7-8],但研究重点多在于磁流变缓冲器本身的设计、控制与性能验证,而对月面飞行器一些新的需求(如月面行驶时的越障缓冲)尚少有分析和回应。
本文参考着陆缓冲机构设计方法[9-10],针对月面飞行器对缓冲机构兼顾着陆与越障缓冲的需求,提出一种将轮式移动机构与磁流变缓冲器相结合的新型缓冲机构方案。
2 缓冲机构设计
2.1 设计对象
根据月面大范围机动系统总体方案研究技术指标要求,低空飞行器结构总体包络尺寸为:Φ2500 mm×6000 mm,飞行器总体质量1200 kg(包含着陆缓冲系统),乘载2人共300 kg,着陆缓冲机构质量80 kg,人员冲击加速度最大过载5g。
针对月面探测任务需求设计的低空飞行器为四腿构型,4个缓冲支腿沿飞行器对称分布。结构布局如图1所示。
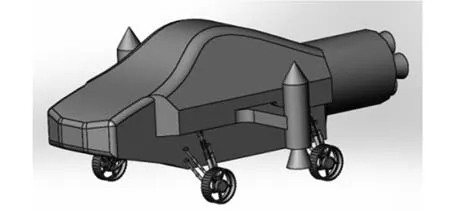
图1 低空飞行器结构Fig.1 Structure of low-altitude aircraft
2.2 总体方案
缓冲机构设计如图2所示,包括1只主缓冲器和4只辅助缓冲器,均采用阀式磁流变阻尼器。长度可调的辅助支撑机构主要用于车轮的固定和收放。同侧的2个辅助支撑内部磁流变液通过管道相互连通,一个辅助支撑内部的流出和流入管道与另一个辅助支撑内部的流入和流出管道交叉连通,磁流变液流经管道中间的阀式磁流变阻尼器时会产生一定的阻尼力。
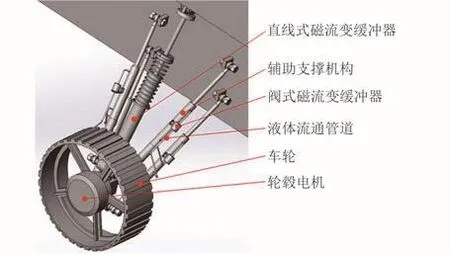
图2 缓冲机构图Fig.2 Diagram of landing gear
2.3 详细设计
磁流变缓冲器的主要缓冲元件为弹簧和磁流变阻尼器,其中弹簧提供恢复力,磁流变阻尼器提供阻尼力,通过控制电流强度来控制线圈的磁场强度,从而控制阻尼器的阻尼系数,实现缓冲力大小的调节。其具体结构如图3、4所示。
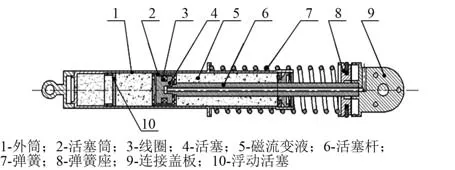
图3 主缓冲器结构Fig.3 Structure of main shock absorber
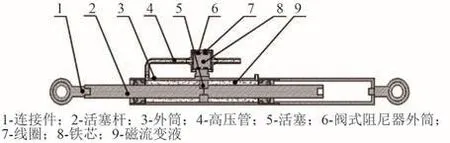
图4 辅助支撑机构结构Fig.4 Structure of auxiliary support mechanism
在主缓冲器的外筒上固定了一个弹簧,在弹簧的上端固定端盖,着陆缓冲完成后机体与该端盖由销钉固连在一起,这时弹簧能起到支撑作用,飞行器再次起飞时固连状态解除,缓冲机构靠自身重力恢复到着陆缓冲初始状态,能够再次地着陆缓冲,实现了缓冲机构的可重复使用。辅缓冲器通过连杆带动外筒内活塞左右滑动,使得外筒内磁流变液在阀式阻尼器之间流通,从而产生阻尼力,起到缓冲并耗散部分冲击能量的作用。
要得到磁流变缓冲器具体结构参数需对主缓冲机构及辅助支撑机构所需的最大阻尼力进行计算。按着陆缓冲过程中所承受的极限加速度a=5g,由F-mg=ma得到着陆器承受的最大载荷为75 950 N,从而计算出1/4缓冲机构的极限载荷。本设计采用的展开角度为27°,主辅缓冲器平面夹角为20°,由空间几何关系,经过计算,得到主缓冲器力值F约为12 000 N,辅助缓冲器力值Ff约 3000 N。
磁流变缓冲器的设计采用Bingham塑性模型(Bingham Plastic,BP),基于BP模型计算缓冲器的输出阻尼力表达如式(1)所示[11]:

其中,F为阻尼器的最大阻尼力;η为磁流变液的黏度;Q为流经工作间隙的液体流量;Ap为活塞截面积;w为平板模型宽度;vd为磁流变液流经间隙d的速度;τ0为磁流变液剪切屈服应力。
基于式(1),选取决定磁流变缓冲器的工作区域的关键几何尺寸,包括激活区域间隙、活塞有效长度、线圈深度和线圈处间隙作为优化变量,根据磁流变缓冲器的活塞杆与活塞的装配尺寸设计约束条件,将阻尼器需提供的最大阻尼力值作为目标函数,利用modeFRONTIER结合ANSYS和MATLAB对磁流变缓冲器进行参数优化,可以得到作为优化结果的关键尺寸见表1。
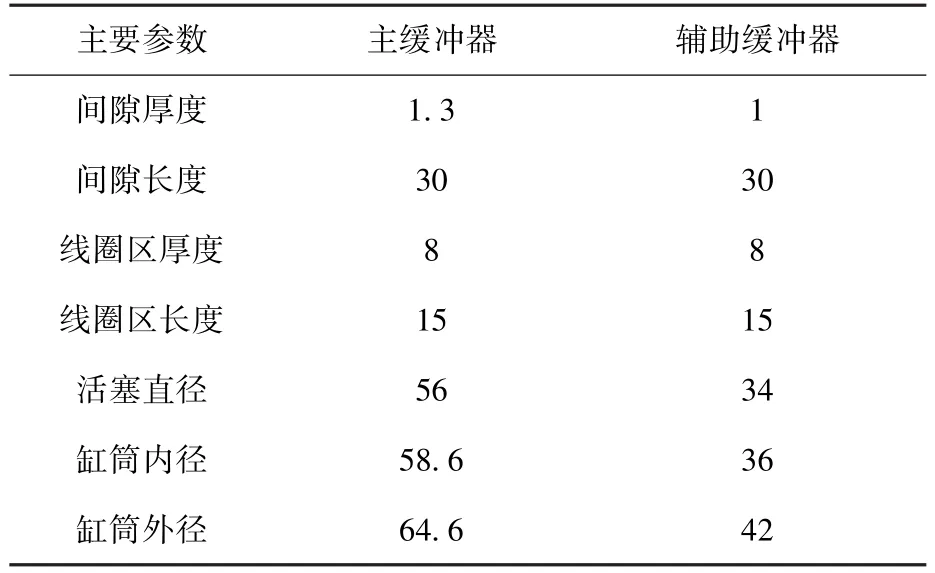
表1 缓冲器尺寸参数Table 1 Key size parameters of buffer /mm
3 仿真验证
3.1 仿真模型
基于虚拟样机分析软件ADAMS环境,建立着陆缓冲机构仿真模型如图5。
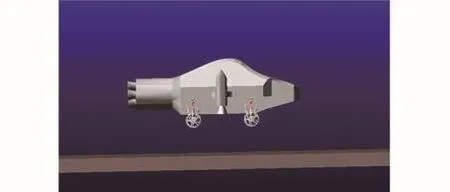
图5 着陆缓冲机构仿真模型Fig.5 Simulation model of landing gear mechanism
在处理着陆器车轮与月壤的接触问题时,将作用力分为法向力和摩擦力,在描述月壤的塑性特征时,结合其表面承载力、弹性系数和阻尼系数等特性对月壤进行了表征,相关参数参考了阿波罗登月舱和探测者系列着陆器着陆仿真所采用的月壤力学性质的描述[12-13]。
3.2 软着陆分析
为验证本文提出的用于月面低空飞行器的着陆缓冲机构在着陆过程的缓冲性能,进行软着陆分析。根据阿波罗载人登月舱竖直速度约为1~3 m/s,着陆工况选为:竖直初始速度为1 m/s,距月面高度为1 m,主、辅助缓冲器仿真模型阻尼单元的阻尼系数分别为4000 Ns/m和1000 Ns/m。
仿真得到低空飞行器软着陆时的机体质心加速度时间历程如图6所示,最大值约为3.32g,有效地降低了冲击载荷,满足最大冲击加速度不超过5g的设计要求。

图6 机体质心加速度幅值Fig.6 Amplitude of body centroid acceleration
不同阻尼系数缓冲过程主缓冲器的阻尼力如图7所示,从图形包络面积可以看出主缓冲器器耗能可调,且在阻尼系数为4000 Ns/m时,可充分利用其有效行程,缓冲器耗能面积较大,具有较好的缓冲性能。
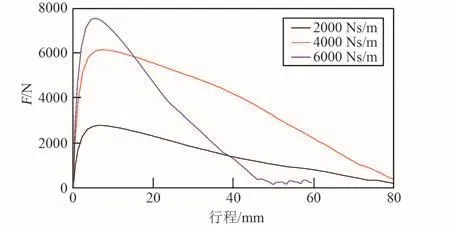
图7 不同阻尼系数时缓冲过程主缓冲器力值Fig.7 Main buffer force value with different damping coefficients during buffering
3.3 越障分析
为了验证着陆缓冲机构在复杂月面路况环境开展移动探测时缓冲机构的缓冲性能,进行了越障分析。越障工况为在月球表面跨越凸形障碍、凹形障碍和坡度障碍。参考玉兔二号数据,低空飞行器运动速度设为 0.1 m/s、0.3 m/s和0.5 m/s,设置凸形障碍、凹形障碍和坡度障碍(最大坡度20°)。与软着陆相比,越障时对缓冲机构的极限性能要求较低,因此在此工况下,主、辅助缓冲器仿真模型阻尼单元的阻尼系数可调为2000 Ns/m和500 Ns/m。
仿真可得越障时机体质心加速度时间历程如图8~图10所示。可以看出,不同速度下的机体质心加速度幅值的前后两个峰值分别是月面低空飞行器前后轮跨越障碍的时刻,表示所设计月面低空飞行器能成功越障,实现了月面行驶的功能。而且在不同的越障工况下,随着运动速度的增加,机体质心加速度值有所增加,但3种工况下的机体质心加速度最大值约为1.25g,远小于极限加速度,说明月面低空飞行器在复杂月表越障行驶时缓冲机构能够发挥较好的缓冲隔振作用。
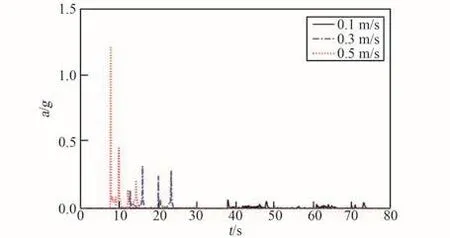
图8 跨过凸形障碍时的机体质心加速度幅值Fig.8 Amplitude of body centroid acceleration when crossing convex obstacle

图9 跨过凹形障碍时的机体质心加速度幅值Fig.9 Amplitude of body centroid acceleration when crossing concave obstacle
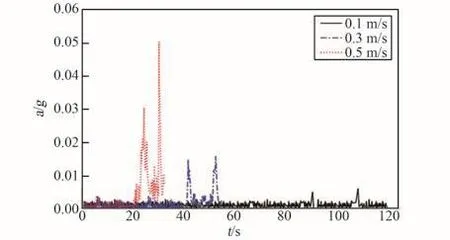
图10 跨过坡度障碍时的机体质心加速度幅值Fig.10 Amplitude of body centroid acceleration when crossing slope obstacle
4 结论
1)设计新型缓冲机构将月球车轮式移动机构与磁流变缓冲器相结合,实现了着陆缓冲机构和月面飞行器移动机构的一体化;
2)着陆时,飞行器极限加速度载荷约为3.32g,不超过最大冲击加速度5g,可有效地降低冲击载荷,具有较好的着陆缓冲性能;且其耗能可调,通过在障碍路况移动探测时调节阻尼,可有效提高移动探测过程的稳定性。
猜你喜欢
城市轨道交通研究(2022年6期)2022-07-15
世界地震工程(2022年2期)2022-05-11
建材发展导向(2022年5期)2022-04-18
轻兵器(2022年3期)2022-03-21
军民两用技术与产品(2021年10期)2021-03-16
装备维修技术(2021年44期)2021-02-17
青年文学家(2020年10期)2020-04-27
振动工程学报(2019年5期)2019-11-27
河南科技(2019年11期)2019-09-10
振动工程学报(2016年2期)2016-07-20