波纹式航天服关节阻力矩特性研究
2019-12-24 07:32王鲁豫周仕明李道奎
载人航天 2019年6期
王鲁豫,周仕明,尚 坤,李道奎*
(1.国防科技大学空天科学学院,长沙410073;2.中国航天员科研训练中心人因工程国家重点实验室,北京100094)
1 引言
舱外航天服主要功能是为航天员提供真空防护和保障作业[1]。由于航天服内部充气加压导致服装内外产生压差,使得服装关节在运动时产生较大的阻力矩,制约着航天员着服作业的效率。随着空间探索的发展,需要愈加复杂的舱外活动,要求航天服关节更灵活、更可靠。波纹式关节是一类典型的航天服软关节,用以实现关节低阻力弯曲[2]。美俄航天服设计中,在服装的不同部位都曾使用这种结构[3-4]。因此,研究和改进波纹式关节具有十分重要的意义。
早期航天服软关节研究中,研究人员常采用试验测试的方法对关节阻力矩进行研究。Vykukal等[5]、Matty[6]和 Meven 等[7]对航天服软关节阻力矩进行试验分析。王昊等[8-9]、赵京东等[10-11]通过试验测得波纹式关节阻力矩,并对试验曲线进行拟合,获得关节运动时的阻力矩模型,但该模型反映不出波纹式关节的结构参数对阻力矩的影响。王晓东等[12]应用“fish-scale”方法[13]对有人和无人条件下的肘关节和肩关节阻力矩进行试验测量。
在软关节理论研究方面,国内外学者对不同的阻力矩模型进行了研究。阿布拉莫夫等通过建立关节内力与外力的平衡关系,获得了波纹式关节阻力矩与转角的关系模型,但该模型没有考虑波纹壳体的弹性变形。Furuya和Yokoyama[14-15]对充气圆管和充气波纹管进行了弯曲过程仿真,分析了褶皱的产生和发展。Li等[16]开发了一种由多刚体模型和肌肉力模型组成的航天员上肢模型,该模型是将关节阻力矩作为边界条件,从而进行上肢运动模拟。李广利等[17]依据最小势能原理,推导了波纹式关节的阻力矩方程,由此得到阻力矩和转角的关系,但该理论方法没有考虑分隔元件的变形,以及分隔元件的截面是非平截面的实际情况,并且在假设中将限制层材料视为各向同性,不能体现织物材料的非线性性质。尚坤等[18]利用有限元方法对平褶式航天服关节进行运动仿真,获得了关节阻力矩和转角的关系,分析了阻力矩成因,但材料定义没有考虑织物材料的迟滞特性。张新军等[19]采用Jiles-Atherton磁滞模型[20],得到能够反映出关节力矩迟滞特性的数学模型,拟合出肩关节和腕关节阻力矩曲线,但该方法不能直接反映出关节结构尺寸的影响。
近年来,国内学者提出了一些新型的航天服关节设计。刘奇林等[21-22]结合褶皱结构和等张力体结构的特点,设计了一种新式航天服软关节,通过试验研究,说明了新式关节的优势,但未在实际服装关节中进行检验。之后建立了航天服等张力体关节的有限元模型,分析关节阻力矩,并进行了试验验证,但缺乏对阻力矩成因的分析。王振伟等[23]提出了一种适用于高引力系数状态下的硬式航天服关节系统的概念设计方案,并设计了硬式髋关节,但是缺乏实物验证。牛希[24]设计了一种由旋架硬式结构组成的航天服髋关节,但缺乏软结构的设计,并且没有对新设计的关节进行检验。
综上,目前研究中服装建模均没有考虑航天服关节充气后腔内容积和气压变化的影响,以及人服接触和织物材料非线性性质的影响。本文采用非线性有限元方法,综合考虑波纹结构的复杂几何形状、分隔元件的变形、织物材料的非线性性质、气腔压力和人服接触的影响,建立基于舱外航天服髋关节结构的有限元模型,模拟波纹式髋关节在有人和无人状态下的运动情况,并分析波纹式关节阻力矩的来源,对波纹式关节结构参数进行优化。
2 波纹式航天服关节
波纹式航天服关节主要由防护层、限制层和气密层3层结构组成。外层防护层的作用是保护舱外航天员免受射线和粒子流等太空环境伤害。中间层是限制层,由织物材料拼接缝合制成,用于承载航天服内气体压力,起结构强度作用。织物材料具有较大的抗拉刚度和强度,但不能承受压缩和弯曲载荷。气密层位于内层,一般由橡胶、聚合物等材料组成,构成航天服内部密闭腔体,防止航天服气体泄漏。波纹式航天服关节在结构上可分为波纹和限制带2部分。限制带分为分隔元件和轴向限制带。其中,位于相邻波纹之间的横向闭合的带子称为分隔元件,分隔元件一般由较厚的织物构成,其周长比波纹周长小,按照一定几何关系缝合在相邻波纹之间,约束波纹结构充气后的周向尺寸。在波纹式关节上对应两侧裤缝线位置设有由带子构成的轴向限制带,且带子的长度可以调节,用来限制波纹结构沿轴向的伸长。波纹式航天服关节结构如图1所示。

图1 波纹式航天服关节Fig.1 Corrugated joint of spacesuit
3 有限元建模方法
3.1 几何模型
波纹式关节的主要承力结构是织物,故在建模时主要以限制层为依据,建立单层柔性波纹式关节。如图2所示,使用交互式CAD软件CATIA构造了1个波纹式髋关节的几何模型。通过曲面造型表现波纹和限制带的几何特征,整体结构分为上、中、下3部分,中部为波纹几何,包含4个波纹以及波纹之间和上下两端的分隔元件。波纹关节两端使用堵盖封闭关节腔体。人体大腿模型也使用曲面形式构建外轮廓,尺寸参考GJB 36A-2008《飞行员人体模板设计和使用要求》[25]的中号模板。

图2 波纹式髋关节几何模型Fig.2 Geometric model of corrugated hip joint
3.2 材料和单元
织物按照交织方向分为经、纬2个方向,由于织物纱线的非线性力学性质、纱线之间的摩擦力作用、经纱和纬纱的屈曲变化,以及织物变形过程中结构发生的变化,使得织物在经向、纬向和剪切性能上呈现出非线性的力学性质[26]。需要通过其经、纬方向上的拉伸试验和像框剪切试验[15]确定材料模型参数。
按照纺织工业标准[27],在万能试验机上对服装所用织物材料进行经向和纬向的拉伸试验,得到织物经、纬2个方向上的拉伸性能,如图3(a)所示。织物材料在面内表现为各向异性,且在经、纬2个方向上的加卸载过程中呈现出鲜明的非线性,并且在加卸载过程中存在能量损耗,经向和纬向上均存在迟滞现象。按照文献[16]中描述的织物像框剪切试验方法,测得织物剪切性能曲线,如图3(b)所示,织物在剪切性能试验中表现出明显的非线性,并且卸载过程中存在迟滞现象。

图3 织物材料力学性能曲线Fig.3 Mechanical property of fabric
为准确模拟织物材料的各向异性和非线性力学性质,采用Abaqus软件的input文件中添加关键字“*Fabric”及相应程序代码的方法定义材料。对于经、纬方向上拉伸加卸载曲线和剪切加卸载曲线的模拟,以图3(a)所示的纬向拉伸加卸载曲线为例,试验得到了织物的纬向拉伸加卸载数据点,在Abaqus软件中的Damage材料模型中定义测得的数据点和线性插值方式,则在相邻数据点之间的区域将采用线性插值的方式定义材料本构,即由每一小段直线相连构成加卸载曲线,如此反映织物拉伸加卸载非线性性质;该材料模型允许材料在卸载时耗散能量,且完全卸载时没有永久变形,能够反映织物材料卸载段的迟滞特性。这样,就将试验测得的织物材料的本构关系应用于模型中。
由于构成航天服的织物、橡胶等材料均是薄层材料,其抗弯刚度对结构分析影响很小,故而波纹式关节采用膜单元M3D4R,两端堵盖使用离散刚体单元。
3.3 波纹结构约束
为模拟实际波纹式关节的轴向约束,在整体结构的两侧分别建立了轴向限制带,并按实际缝合位置与第1层和第5层限制带缝合在一起。周向约束则采用5层分隔元件,位置位于每层波纹的上下两侧,如图4所示。

图4 限制带位置Fig.4 Location of restraint strap
3.4 边界条件
位移边界条件与力边界条件构成了模型的边界条件。
波纹式关节上端使用固定约束,构成位移边界条件。关节气腔内的气体压力构成腔内的力边界条件。通过将模型的关节腔定义为流体腔,实现对关节腔的充气,使用流体腔参考点控制腔内压力,同时方便输出实时腔内气体体积和质量。模型计算首先为充气,按照一定大小的气体流量向腔内充入气体模拟充气过程,一定时间后,腔内达到指定工作压力40 kPa。之后维持腔内气体质量不变,即模型不漏气。
关节运动的加载方式分为外部驱动和人体驱动2种方式。为模拟试验中外部驱动状态下的运动,即无人穿着服装状态下的关节运动,本文采用力加载的方式进行模拟。在充气过程中,下端处于自由状态,充气完毕,结构达到初始平衡后,通过在下端刚性堵盖上施加力载荷实现关节运动。如图5所示为模型的力加载曲线和腔内压力变化曲线,0~1 s是充气过程,模型腔内压力逐渐加压至40 kPa,从1 s时刻开始施加力载荷,转动过程中腔内压力变化如虚线所示。
人体驱动方式下的髋关节服装边界条件与无人状态相类似,髋关节上端为固定约束,充气过程中服装的边界条件与无人状态相同,不同的是关节的转动过程设置了人体与服装的接触关系。如图6所示,在人体髋关节中心施加转角载荷使大腿转动,通过人体与服装相接触的方式带动服装转动。

图5 关节压力和加载力曲线Fig.5 Loading curves of joint pressure and force

图6 人体和服装装配关系Fig.6 Assembly of human body with garment
4 仿真验证与分析
4.1 无人状态试验与模拟结果对比
为验证模型,试验件采用和模型相同的尺寸。试验充气压力为40 kPa。如图7所示,试验测量时使用拉力计对波纹关节下端中心进行加载,加载方向始终垂直波纹关节轴线,与转动平面平行,用量角器测量关节转角,即夹角θ,同时记录拉力计读数F。

图7 加载示意图Fig.7 Schematic diagram of loading
对应于每一个关节转角,分别进行5次该角度下的转动实验,即从初始位置开始施加拉力转动到该角度,记录此时的拉力计读数并计算出阻力矩大小,重复5次,取5次阻力矩的平均值作为该角度下的阻力矩。
试验中力臂长为加载中心至关节转动中心的距离,关节阻力矩的大小为拉力计读数与力臂长的乘积,见式(1)。

式中,M为波纹式关节阻力矩,F为拉力计读数,L为力臂长。
图8展示了无量纲的波纹式关节的阻力矩与关节转角的对应关系。无量纲的关节阻力矩定义见式(2)[15]。

式中,p是关节腔内气体压力,r是关节半径。模型计算结果能够反映波纹式关节运动过程中阻力矩的变化趋势和特性。波纹式关节转动不超过10°时,仿真结果与试验测量结果较为吻合,转动大于10°时,关节出现了硬化现象,仿真与试验测得的阻力矩都迅速增长,仿真结果大于试验测量结果。

图8 无量纲的阻力矩与关节角度的关系Fig.8 Relationship between dimensionlessdrag torque and joint angle
由于有限元模型提取了实际结构主要的结构特征和材料特性,对实物关节进行了简化,存在一定的数值误差。并且实际波纹结构较为复杂,几何模型与实物样件会在各个波纹的尺寸和间距上面存在误差。此外,力臂和关节转角采用在试验件外侧测量的方式,因此测量结果与实际力矩和转角存在误差。由于试验设备所限,本文未对人体驱动仿真结果进行验证。
4.2 人体驱动和外部驱动对比
图9展示的是人体穿着服装时髋关节的运动过程,人体大腿从初始位置开始,转动5.1°后与人体相接触,之后人体开始驱动服装运动。波纹式髋关节关节发生转动后,转动内侧波纹和分隔元件进行了压缩,转动外侧波纹和分隔元件产生了伸展。有人和无人状态下的髋关节阻力矩对比,如图10所示。人体驱动髋关节运动时的关节阻力矩大于外部力驱动服装运动条件下的关节阻力矩,并且随着关节转角的增大,人体驱动阻力矩和外部驱动的阻力矩的差值逐渐增大,在转角为10°时,人体驱动方式的阻力矩相比外部驱动增大了58.51%。关节转角达到最大值15°时,人体驱动方式的阻力矩相比外部驱动增大了61.55%。

图10 两种驱动方式下的关节阻力矩对比Fig.10 Contrast of drag torque under two driving methods
5 阻力矩成因分析
5.1 关节腔容积影响
以往的关节阻力矩研究结果认为在关节转动过程中对腔内气体压缩做功是关节阻力矩的主要来源[15],在只考虑气腔体积变化的条件下,关节阻力矩的计算公式见式(3)。

式中,V是关节腔容积,θ是相应的关节运动转角。
图11给出了波纹式关节弯曲和伸展运动过程中,关节腔容积随关节转角的变化情况。在波纹式关节弯曲过程中,关节腔容积随关节转角增大而减小,并且减小的速率逐渐加快,如图5所示,充气40 kPa后腔内压力基本保持不变。且人体驱动时容积减小的速度更快,容积变化更大,因此压缩气体做功更大,导致更大的阻力矩。在波纹式关节整个转动过程中,人体关节腔容积变化不超过原始容积的1.32%,表明波纹式关节具有较好的等容性。但由于关节腔容积较大,容积的较小变化也能引起较大的压缩气体做功。
5.2 能量分析
从能量角度分析,在人体驱动波纹式关节运动过程中,存在能量变化如式(4)所示:

式中,ESE为弹性应变能,EKE为动能,EFD为摩擦耗散能,Wcompress为压缩气体所做的功,该值可通过腔内压力p对体积V积分并取负值得到,如式(5)所示:


图11 关节腔容积随关节角度变化Fig.11 Variation of joint volume with joint angle
Eext为外力所做功,该值通过关节阻力矩M对关节转角θ积分得到,如式(6)所示:

弹性应变能、动能和摩擦耗散能计算方法参考能量平衡(Energy balance)方法[28]。通过模型计算得到的关节转动过程中各类功和能量的变化如图12所示。波纹式关节在运动过程中,相较于其他几种功和能量,动能和摩擦力做功很小,数值接近0,模型中的动态响应可以忽略,摩擦对关节阻力矩的影响很小。在关节转动过程中,压缩气体做功一直增大,弹性应变能改变量较小,且变化较平缓。
模型求解得到的不同种类的能量和功,对应不同种类的关节阻力矩来源。经过分析,无论外部驱动还是人体驱动,波纹式关节阻力矩来源包含腔内气体受压缩产生的阻力矩和关节弹性变形产生的阻力矩2部分。前一部分阻力矩由关节腔容积的变化情况决定,通过式(2)可求得其大小。后一部分阻力矩受到波纹式关节的材料、几何形状和加载方式的综合影响,可通过应变能对关节转角求微分得到。在外部驱动波纹式关节转动过程中,压缩气体做功变化量较大,弹性应变能变化量较小,在转动大于10°之后,由弹性变形引起的弹性应变能开始增大;在人体驱动波纹式关节转动过程中,压缩气体做功变化量和弹性应变能变化量均大于外部驱动方式,且关节转角大于5°时,弹性应变能开始加速增长。由于人体驱动时2种来源对关节阻力矩的贡献均大于外部驱动,所以人体驱动时的关节阻力矩大于外部驱动时的关节阻力矩。在15°范围内转动时,2种驱动方式下,压缩气体做功是阻力矩的主要来源,并且在较大转动角度时,弹性应变能对阻力矩的影响开始增大。因此改进波纹式关节的结构和材料设计,保持波纹式关节的等容性,减小转动过程中气腔体积变化,同时减小因弹性变形产生的阻力矩十分重要。

图12 各类功和能量的变化Fig.12 Variation of different types of work and energy
6 结构优化分析
6.1 波纹式髋关节参数分析
第5节研究得到结构弹性变形和压缩气体做功是波纹式髋关节阻力矩的来源,而波纹式关节的波纹个数、波纹直径、波纹间距和关节半径等结构参数是影响两种来源的重要因素,本文对结构参数进行优化设计,用以降低阻力矩,提高波纹式髋关节的灵活性与舒适度。为便于进行结构优化,将波纹形状理想化为半圆,保留了轴向限制带,分隔元件等重要结构特征,建立了如图13所示的波纹式髋关节参数化模型。其中,D为关节直径,d为波纹直径,dmiddle表示波纹间距。

图13 波纹式髋关节参数化模型Fig.13 Parametric model of corrugated hip joint
首先针对波纹个数、波纹直径和关节半径3个参数进行阻力矩影响因素分析,关节转动采取人体大腿转动从而带动波纹式髋关节服装转动的方式进行,结果如图14所示。其中,图14(a)给出的是波纹个数为4个、关节半径为100 mm、波纹直径分别取4种不同直径下,关节阻力矩随关节转角的变化情况。发现关节阻力矩随着波纹直径的增大而减小。图14(b)给出的是波纹直径为18 mm、关节半径为100 mm、波纹个数分别取4~7个时,关节阻力矩随关节转角的变化情况。发现关节阻力矩随着波纹个数的增大而减小,且波纹个数的变化对阻力矩变化影响明显,在关节转角均为15°,波纹个数为7个时,阻力矩比波纹个数为4个时减小了57.3%。图14(c)给出的是波纹个数为4个、波纹直径为34 mm、关节半径分别取4种不同半径下时,关节阻力矩随关节转角的变化情况。发现关节阻力矩随着关节半径的增大而增大。
6.2 波纹式髋关节结构优化
航天服下肢髋关节的灵活性由关节阻力矩多少表征,同一角度下,阻力矩越小,关节越灵活,关节运动舒适度可以由人体克服阻力做功表征,人体从初始位置转动至目标角度所消耗的能量越少,即克服阻力做功越少,关节舒适度越高。
选取波纹个数、波纹直径、波纹间距和关节半径4个参数作为优化设计的变量,变化范围如式(7)所示。波纹结构轴向长度作为约束,以人体转动20°时髋关节所受的阻力矩最小和整个转动过程中的克服阻力做功量最小作为2个优化目标(即提高波纹式髋关节的灵活度和舒适性),建立了波纹式髋关节结构优化的数学模型,见式(7):

图14 结构参数对阻力矩的影响Fig.14 Influence of structural parameters on torque

优化方法选用NSGA-Ⅱ算法,该方法适用于多目标优化。如图15所示为优化后的Pareto图,图中黑色的点表示可行解,蓝色的三角形代表最优解集,由这些点构成了优化前沿。

图15 Pareto图Fig.15 Pareto diagram
经过优化,最优的波纹个数、波纹直径、波纹间距和关节半径如表1所示,优化后的两个优化目标值如表2所示。最优结构的阻力矩相比初始结构减小了 35.8%,克服阻力做功减小了37.1%,优化结果明显提高了波纹式髋关节的灵活性和舒适度。

表1 优化前后关节结构参数Table 1 Structural parameters of joint before and after optimization
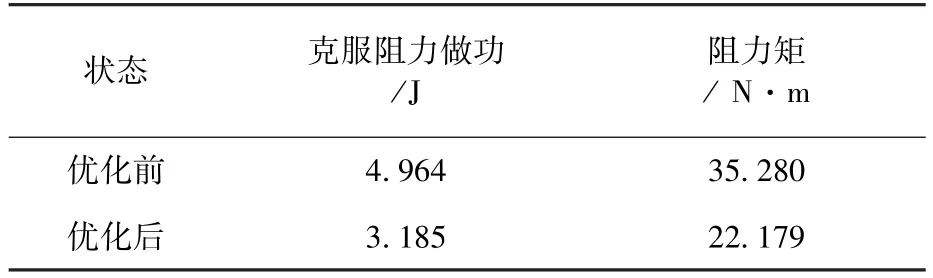
表2 优化目标Table 2 Optimized targets
7 结论
本文提出了一种波纹式航天服髋关节精细化有限元建模方法,建立了考虑织物材料特性、充压环境和人服接触的模型,在对模型的正确性进行了试验验证的基础上,进行了有人和无人状态下的关节阻力矩成因分析,并对关节结构参数进行了优化,得到以下结论:
1)波纹式航天服髋关节阻力矩的来源有2个方面,即结构弹性变形和对压缩气体所做的功,其中对压缩气体所做功是阻力矩的主要来源;
2)有人状态下的波纹式髋关节阻力矩大于无人状态下的关节阻力矩,且有人状态下的结构弹性变形能和对压缩气体所做的功均大于无人状态;
3)增大波纹直径、增加波纹个数和减小关节半径等方式可以减小关节阻力矩;
4)在参数化模型的基础上进行结构优化设计,给出了最优结构参数,降低了波纹式髋关节的阻力矩和克服阻力做功,提高了关节灵活性与舒适度。
猜你喜欢
载人航天(2021年5期)2021-11-20
北京航空航天大学学报(2021年6期)2021-07-20
阅读(低年级)(2021年10期)2021-03-08
课堂内外(小学版)(2021年11期)2021-01-17
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
文苑·经典美文(2008年5期)2008-09-18