
基于直流电机驱动电路的移动式采摘机器人设计
2019-12-21 02:49:14张战杰
农机化研究 2019年4期
张战杰
(洛阳职业技术学院,河南 洛阳 471003)
0 引言
随着机器学习、机械自动化及智能控制等技术的发展,智能化正在向各个领域延伸。近年来,农业智能化程度越来越高,挤奶机器人、放牧机器人、施肥机器人、除草机器人、葡萄园机器人、育苗机器人、种植机器人、分拣果实机器人、蜜蜂机器人及采摘机器人等相继问世并得到了实际应用。本文基于直流电机驱动策略,设计了采摘机器人大功率电机驱动调速控制系统,对直流电机在农业机器人上的应用具有一定的实际意义。
1 采摘机器人移动平台
采摘机器人一般由控制系统、移动装置、末端执行器、机械手、电源、传感器接口、视觉系统、控制系统和驱动系统组成,如图1所示。移动平台是采摘机器人正常行驶的核心,是其能否灵活移动的核心。

图1 采摘机器人整体系统结构框图Fig.1 The block diagram of overall system structure for picking robot
采摘机器人包括机械和电气控制两部分:机械部分主要包括履带底盘、大小臂、夹持器和动力臂转动装置等;电气控制部分包括传感器模块、障碍物检测模块、主控制板、电源、摄像头和驱动马达等。采摘机器人整体结构如图2所示。
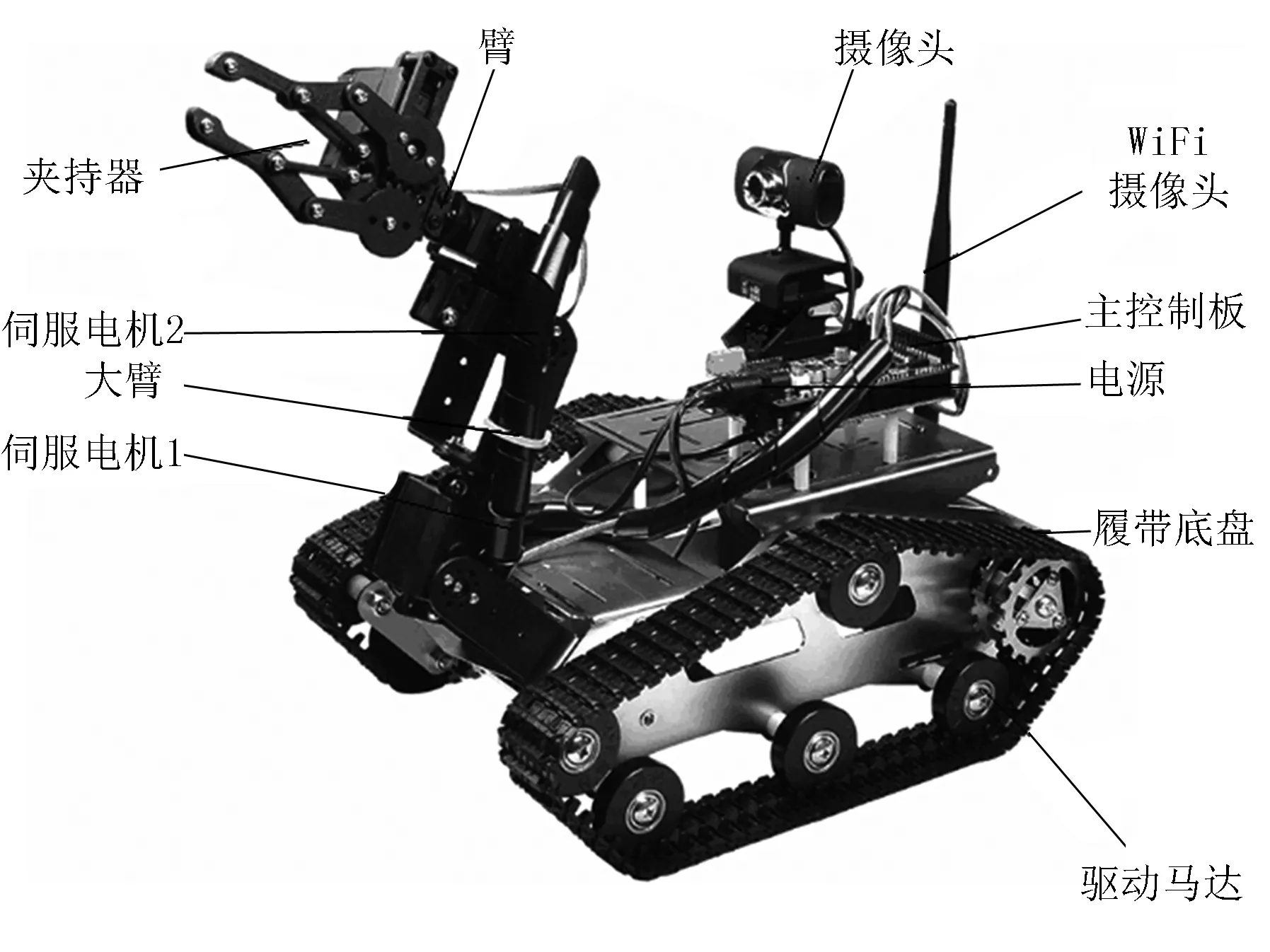
图2 采摘机器人整体结构Fig.2 The overall structure of the picking robot
图2中,机械部分是整机的硬件框架,为机器人运动和采摘作业提供了支撑,其各部件作用各不相同,组合起来实现整个系统的自主控制。移动平台是机器人的基础,是搭建其他机械部件的载体,采摘机器人的机械手、大小臂、主控制系统、电源模块都是搭载在移动平台之上的。电气部分的功能是采用智能控制的方式驱动整个机械部分,使机器人正常移动和作业。
2 采摘机器人运动控制系统设计
采摘机器人的主要工作是实现对目标果实的顺利采摘,运动控制系统的作用无需像特种机器人处理复杂的实时突发状况。为了保证采摘机器人运动系统的整体稳定性,避免能源消耗严重和最小限度地降低开发成本,设计了如图3所示的运动系统框架图。
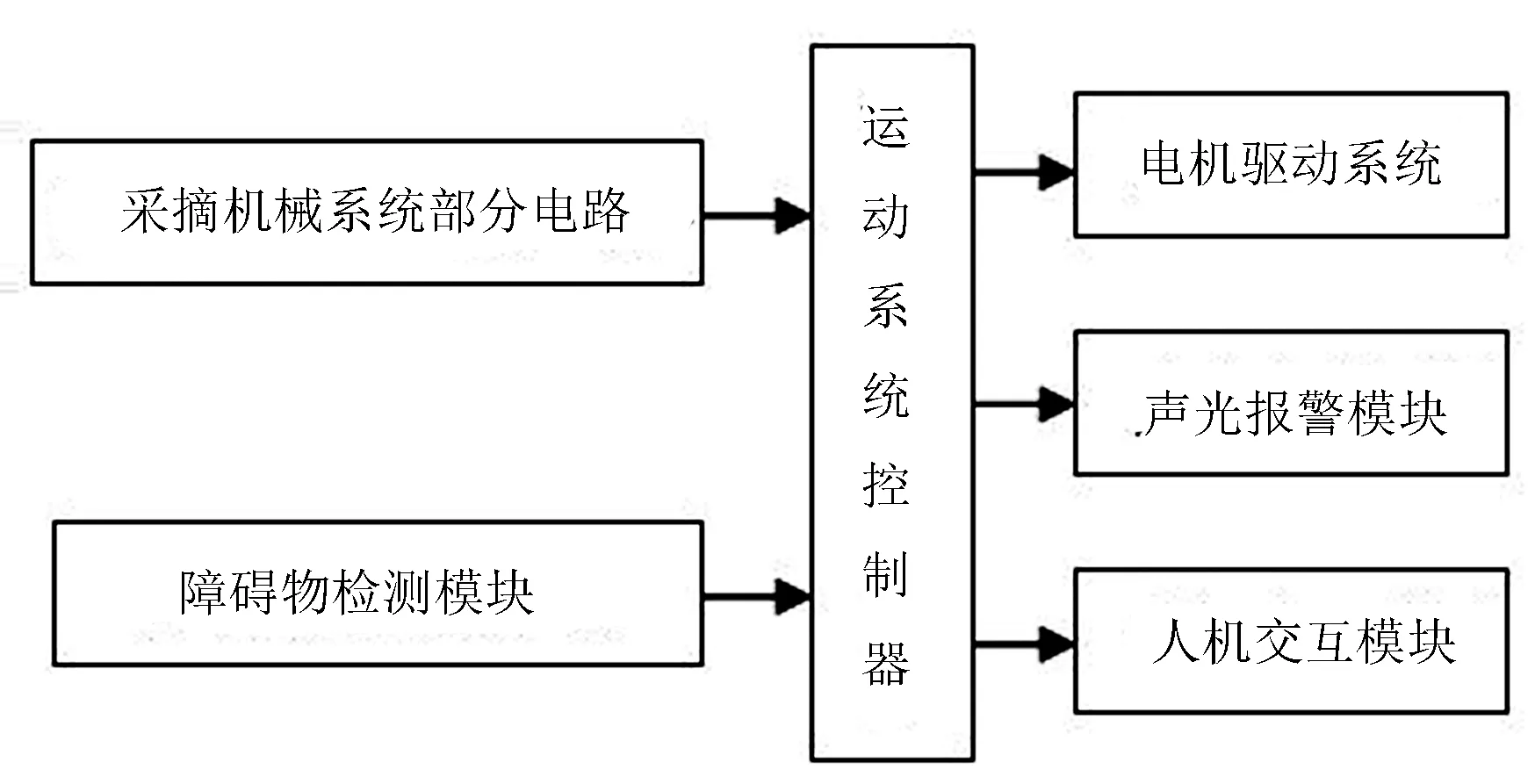
图3 采摘机器人运动控制系统的框架图Fig.3 The frame diagram of the motion control system for the picking robot
本文设计的采摘机器人采用履带行进的方式,前部负责控制车体的前行方向,后部控制车体的前后运动。前部采用一种位置伺服驱动的舵机,根据控制器指令控制机器人的转向;后部采用直流电机驱动,控制机器人的前进后退。采摘机器人车体结构示意如图4所示。
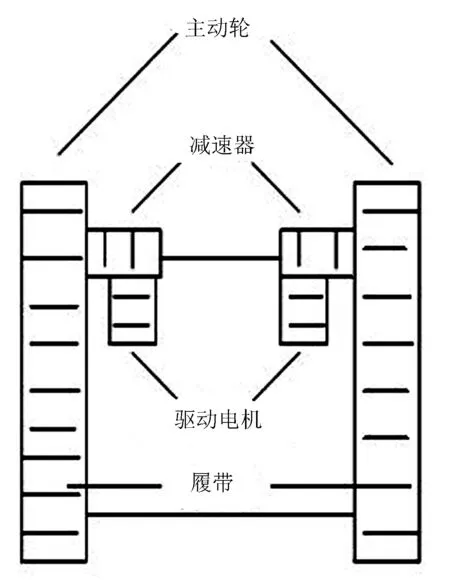
图4 采摘机器人车体结构示意图Fig.4 The schematic diagram of the body structure of the picking robot
3 直流电机选型及驱动系统设计
3.1 直流电机选型
采摘机器人主动轮采用电机驱动的方式。由于系统采用36V锂电池供电,因此选用直接电机驱动。直流电机的转动惯量相对较小,容易控制,能够最大程度地提高采摘机器人运动灵敏性,一般由电动机、转子、位置传感器和开关器组成。直流电机原理框架如图5所示。
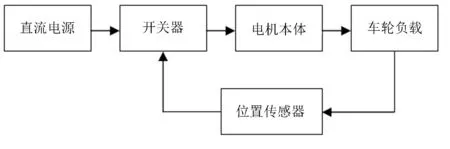
图5 直流电机原理框架Fig.5 Dc motor principle frame
本文采用日本PANASONIC公司的55-110型号直流电机。该电机有两个极数;额定功率为30~1 200W;额定电压为6~110V,具有宽电压输入特性;额定转速为150~6 500r/min。该电机应用系统构成示例图如图6所示。
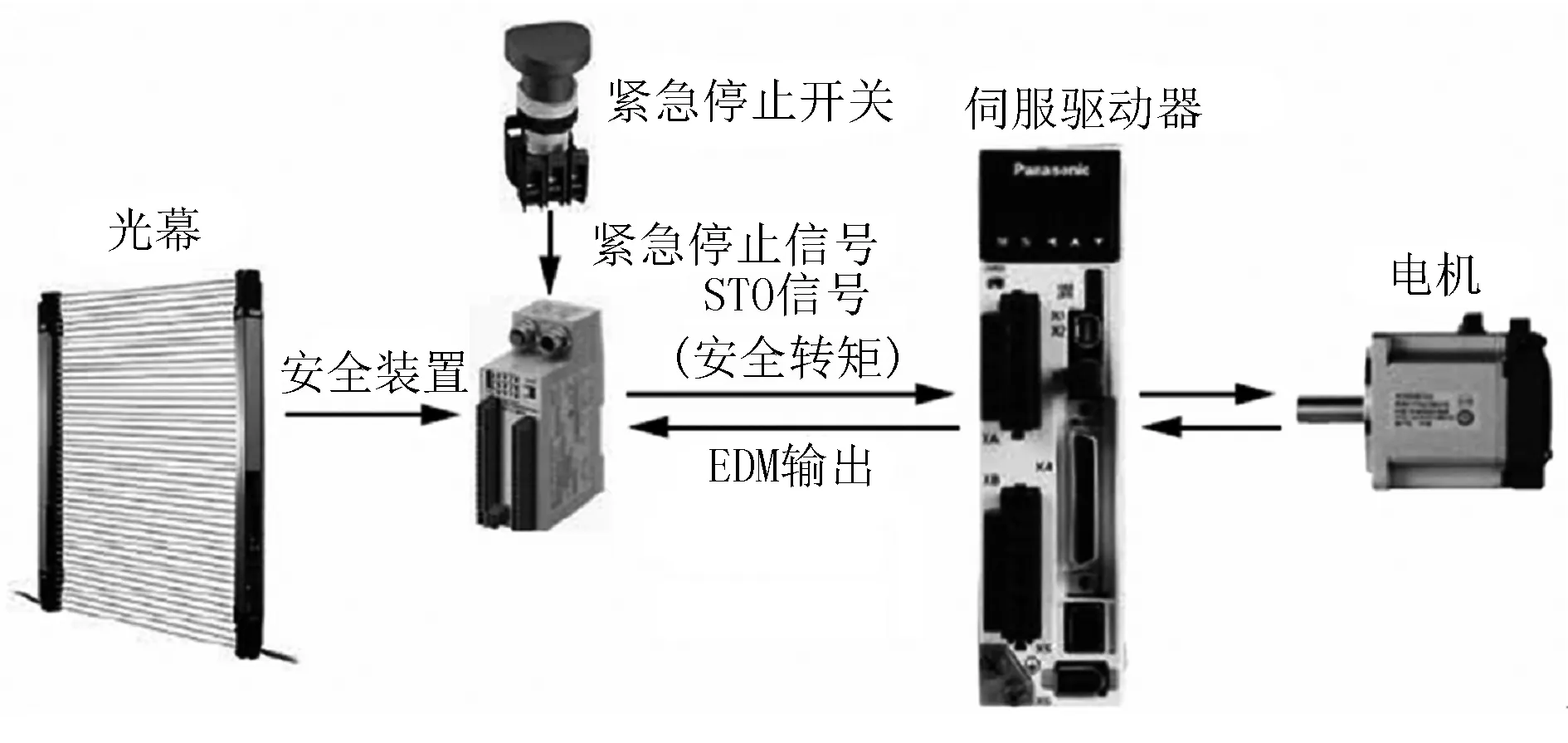
图6 电机应用系统构成示例Fig.6 The example of the structure of the motor application system
3.2 PWM脉宽调速原理
控制电机转速一般是采用PWM脉宽控制的方法。该方法通过改变电机电枢电压的接通与断开的时间比来控制电机转速的方法,实现调节电机转速的目的。PWM脉宽调速原理如图7所示。

图7 PWM调速原理Fig.7 The principle of PWM speed regulation

从图7(b)可以看出:Vd与占空比D并不是完全的线性关系。当系统允许的时候,可以近似看作为线性关系。因此,可以看作Ua与占空比D成正比,改变占空比的大小可达到调节电机转速的目的。
3.3 直流电机驱动系统设计
本文设计的采摘机器人驱动系统采用直流电机驱动。直流电机驱动系统主要由左右电机、NMOS驱动控制电路、光耦隔离器、DC/DC电压隔离及H桥驱动电路组成,如图8所示。
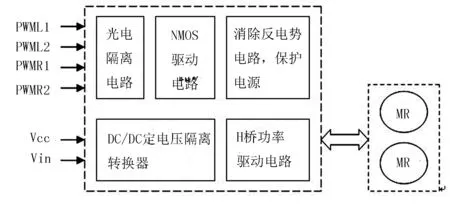
图8 直流电机驱动系统设计结构图Fig.8 The design structure diagram of DC motor drive system
直流电机驱动系统采用4路PWM信号控制,控制信号采用TTL信号输入。为了保证电机控制器的可靠性,避免电机高压部分影响微处理器的稳定性,采用光电隔离电路,将微处理器与电机驱动电路进行光电隔离。4路PWM电路经过光电隔离电路直接控制NMOS驱动控制电路,然后产生4路非共态的PWM信号,控制H桥驱动桥驱动电路,以脉宽调制的方式,控制电机的转速。
3.4 直流电机驱动部分电路设计
1)微处理器最小系统的设计。根据直流电机驱动控制的特点,了解到控制器主要是处理多种数据、控制算法、直流电机驱动和人机交互等,本文选择ST公司的32位STM32F103C8T6微处理器。该处理器包含一个支持JTAG仿真的Cortex-M3处理器、与片内的存储控制器接口的局部总线、与中断控制器的高性能总线AHB和连接片内外设功能的VLSI外设总线VPB,包括指令I-bus、数据D-bus、系统S-bus、内外部专用外设等5个驱动总线。该处理器具有运算能力强、编程简单、功耗低、体积小等优点。控制单元最小系统如图9所示。
2)光耦隔离电路设计。光耦输入阻抗较小,一般为几百欧姆,驱动电流一般在2~20mA,而干扰源阻抗较大,因此输入端的干扰信号会被抑制掉;另外,光耦的输入与输出两端无电气联系,也不会共地,不会产生共阻抗耦合干扰信号。因此,光电耦合隔离是一种有效将不停电压控制回路充分进行隔离的方式。为了保证采摘机器人控制系统的稳定性,减少电机驱动电路模块对控制部分微处理器造成干扰,提高驱动电路的可靠性,本文采用光耦器件进行电气隔离设计。光耦隔离电路设计如图10所示。

图9 控制单元最小系统Fig.9 The minimum system of control unit

图10 光耦隔离电路原理图Fig.10 The schematic diagram of optocoupler isolation circuit
3)电机驱动电路设计。采摘机器人电机不仅只有单向转动需求,更是需要双向转动功能。为了实现采摘机器人的四象限驱动(即满足机器人正常的暂定、前进和后退等运动),本文采用H桥驱动方案。H桥电机驱动电路设计如图11所示。
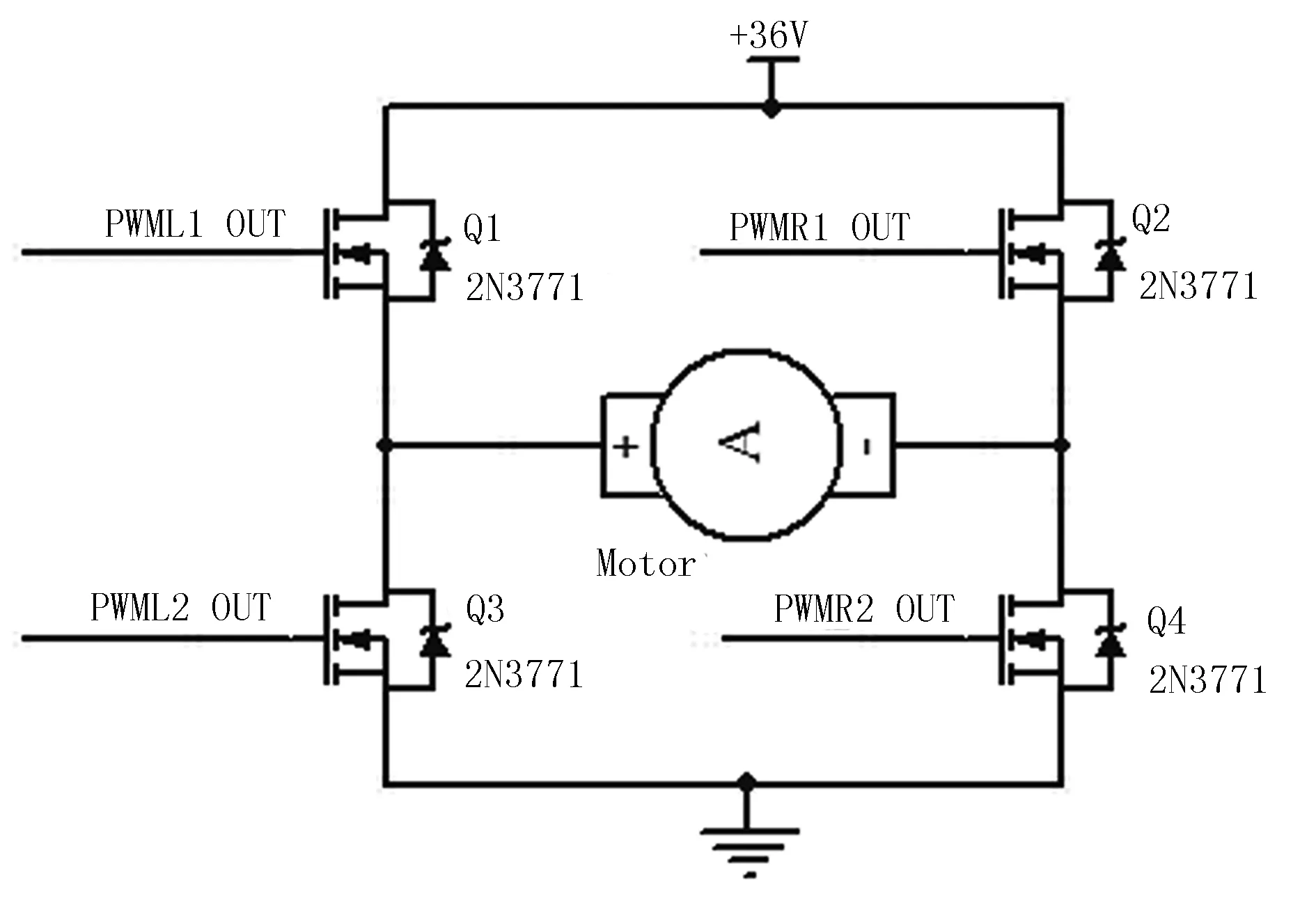
图11 H桥电机驱动电路原理图Fig.11 The schematic diagram of H bridge motor drive circuit
图11中,4个Nmos晶体管组成H的4条腿,直流电机则为H中间的“-”。系统想让电机正常工作起来,则需处理器给定的PWM信号让H桥电路中对角的两个Nmos管导通。在H桥电机驱动中,不同的晶体管导通电机的旋转方向会不一样,这样就能确保电机是前行还是后退。H桥电路工作的3种模式分别为:①暂停。即四路PWM信号全为低电平,4个Nmos晶体管工作状态为截止,电机不转动。②前进。当PWML1_OUT和PWMR2_OUT有高电平产生时,电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极,电机会正向转动,机器人前行。③后退。当PWMR1_OUT和PWML2_OUT有高电平产生时,电源正极经Q2从右至左穿过电机,再经Q3回到电源负极,电机会反向转动,机器人后退。
4 实验与结果分析
为了验证该采摘机器人行走系统的可靠性,进行了实验验证。实验包括直行测试和转弯测试:前5次进行直行试验,行走距离为2、5、8、10、15m;后5次进行转弯试验,转弯角度为30°、60°、90°、150°和180°。行走距离如表1所示,转弯测试如表2所示。
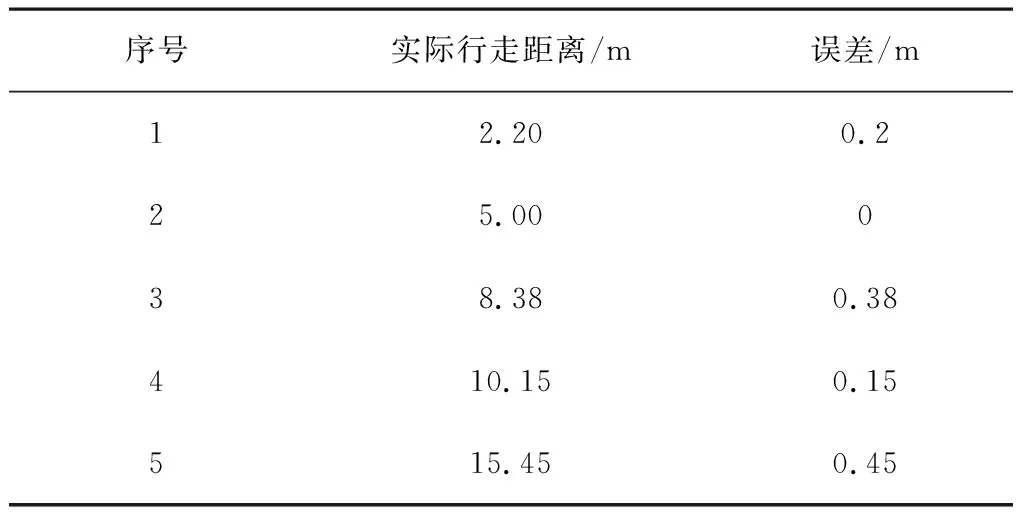
表1 行走距离测试结果Table 1 The test results of walking distance m
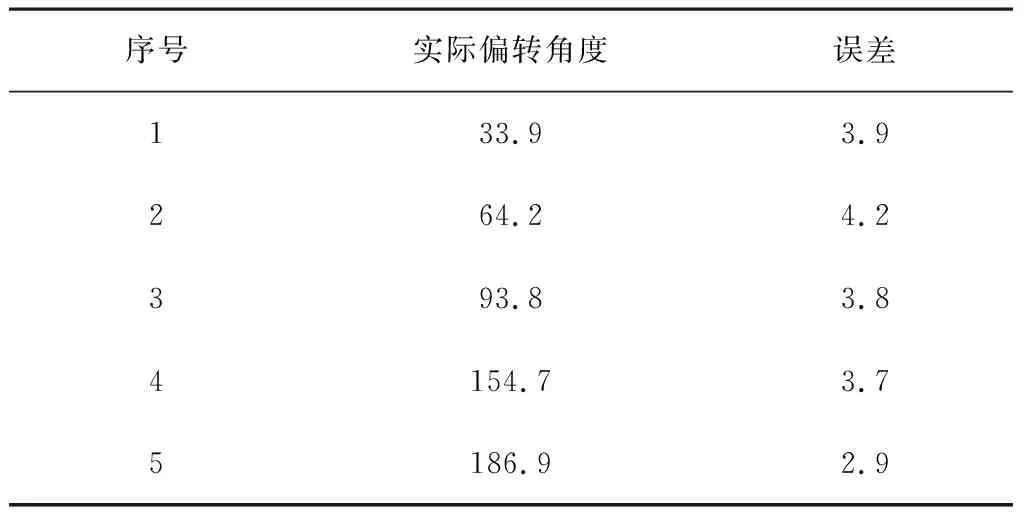
表2 转弯测试结果Table 2 The turn test result (°)
从表1和表2可以看出:在直行测试中,控制系统保证开环控制电机相同的速度,行走误差较小,在0.38m以内;转弯误差测试中,转弯误差与转弯角度关系不大,角度误差在4.2°以内,直行和转弯测试均满足设计要求。
5 结论
以采摘机器人移动行走为研究对象,搭建了采摘机器人移动平台,设计了运动系统控制方案、H桥功率驱动电路及PWM脉宽调速策略,可以实现采摘机器人大功率驱动调速控制。实验结果表明:该采摘机器人在行走和转弯测试中误差较小,能够满足设计要求,对直流电机在其场合的驱动控制具有一定的参考价值。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
电子制作(2019年16期)2019-09-27 09:34:58
电子制作(2019年23期)2019-02-23 13:21:36
电子制作(2017年1期)2017-05-17 03:54:12
通信电源技术(2016年1期)2016-04-16 04:57:31
电源技术(2016年2期)2016-02-27 09:05:13
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
