
气压劈裂式深松铲的土壤劈裂减阻机理及有限元分析
2019-12-21 02:49:00刘明财苏继龙
农机化研究 2019年4期
刘明财,焦 轶,苏继龙
(福建农林大学 机电工程学院,福州 350000)
0 引言
土壤深松是保护性耕作主要的核心技术之一,利用深松铲破坏坚硬的犁底层,可增大土壤的孔隙度,提高蓄水能力,避免出现径流和水土流失[1-2]。目前,国外对深松机械的研发以振动深松机为主[3-5],与大型的拖拉机匹配,不存在深松阻力过大的问题;而国内因主要研发中小型深松机械,主要种类有振动深松机、全方位深松机及深松联合整地机等[6-7],仍存在深松效率低、深松阻力大等问题。因此,近年来很多学者对土壤深松的理论和技术进行了深入研究:徐峰、焦仁宝和张璐等人建立了深松铲的深松阻力数学模型[8-10];徐立冬、袁军等人优化了圆弧形深松铲的结构[11];陈东辉、张金波、龚浩辉等通过研究动物爪趾设计了仿生深松铲[12-14]。同时,对深松铲类型、结构改进与优化方面的研究也有很多重要的成果[15]。在利用高压气体提高土体的渗透性方面的研究,国内外学者也取得了一些的成果。刘德荣、李粮纲等人针对园林果树施肥养护的情况,发明了一种深层松土施肥机[16];韩文君、刘松玉等人通过土槽模拟试验来分析高压气体对软土地基的加固机理[17];左胜甲等人通过设计一种气压深松对耕地土壤进行喷气试验,分析气压深松特性,并验证了气压深松的可行性,深松效果良好[18-19]。目前,对土壤气压深松方式的研究相对较少。
我国南北耕地土质差异较大,现有的研究基本上是以北方旱作耕地为对象,而南方耕地大多以红壤为主,土壤粘性比北方耕地大[20],故传统深松铲在南方耕地作业所受阻力更大,深松幅宽小,易发生弯曲变形甚至断裂。 尽管气压深松机在南方耕地深松只需增大深松气压就可达到深松劈裂效果,但由于土壤粘性大,土壤深松后的抬升量小,因此深松作业后需要旋耕机进行后续处理。针对这种情况,本文开发了一种气压劈裂式深松铲,铲头带有气枪,铲面采用复合形态结构。同时,基于传统深松铲与土壤之间的受力特点,建立气压劈裂式深松铲与土壤之间的力学模型,分析了气压劈裂式深松铲的减阻机理,推导出气压劈裂式深松铲深松阻力的计算公式,并运用有限元验证了该铲型结构设计的合理性和可靠性。
1 气压式深松铲的整体结构及工作原理
1.1 整体结构
气压式深松铲由铲头、铲柄、气管、气枪、固定螺栓组成,如图1所示。铲柄上端3个螺纹孔用于与机架连接固定;铲柄下端6个螺孔用于与铲头固定连接;铲柄内部由气管与气枪头螺纹连接,气枪头上有两个与铲柄两侧面法线平行的喷气孔;铲头采用复合形态,入土的前半部分采用凿型铲的铲形,后半部分采用箭型铲的双翼形,入土阻力小,幅宽较大,碎土率高。
1.2 工作原理
气压式深松铲在拖拉机牵引力的作用下,铲头切屑土壤直到深松机限深轮所调整的深度,开启空气压缩机,控制气枪气压达到相应土壤的劈裂气压,从气枪孔喷射到气枪周围的犁底层;犁底层经高压气体膨胀剪切后产生裂隙,高压气体渗透裂隙后抬升土壤,拖拉机牵引深松机使气压式深松铲继续向前运动,抬升的土壤经复合形态铲头翻动后破碎以完成深松作业。

1.气管 2.铲柄 3.铲头 4.气枪
2 气压劈裂式深松铲减阻机理
2.1 气枪未通入高压气体的土壤与深松铲的受力模型
参照学者郭金龙[21]对振动深松铲的深松过程4个性能方程的描述,未通入高压气体的气压劈裂式深松铲的深松作业过程所受阻力与传统深松铲的阻力模型包括:深松铲面及气枪与土壤之间的摩擦阻力、剪切失效力、切削后土块的加速力和切削的阻力。深松铲铲柄与土壤接触瞬间土壤和铲面的受力如图2所示。

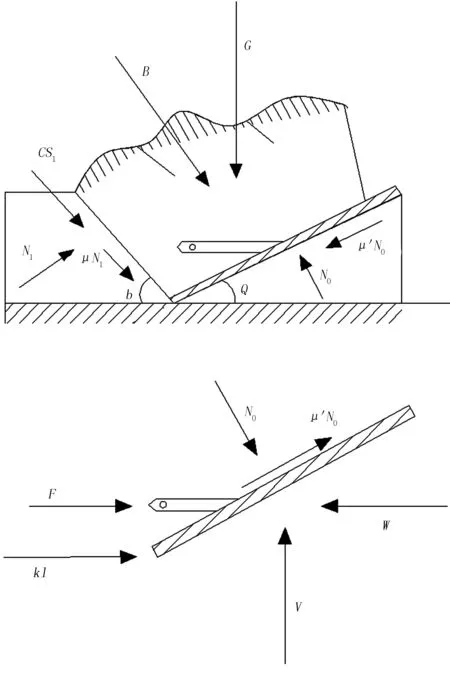
图2 土壤与铲面受力模型Fig.2 Soil and plane stress model
2.2 气枪通入高压气体土壤与深松铲受力模型
当高压气体从气枪喷气孔喷射出时,气孔周围的土壤发生膨胀剪切失效产生裂隙,进而经过高压气体渗透裂隙进一步扩展,促使气枪周围土体抬升。气孔周围裂隙的扩展模型[22]如图3所示。其呈扁平的椭圆形,当R≫h时,可近似地认为气压作用在土体裂隙的上下两个平面。
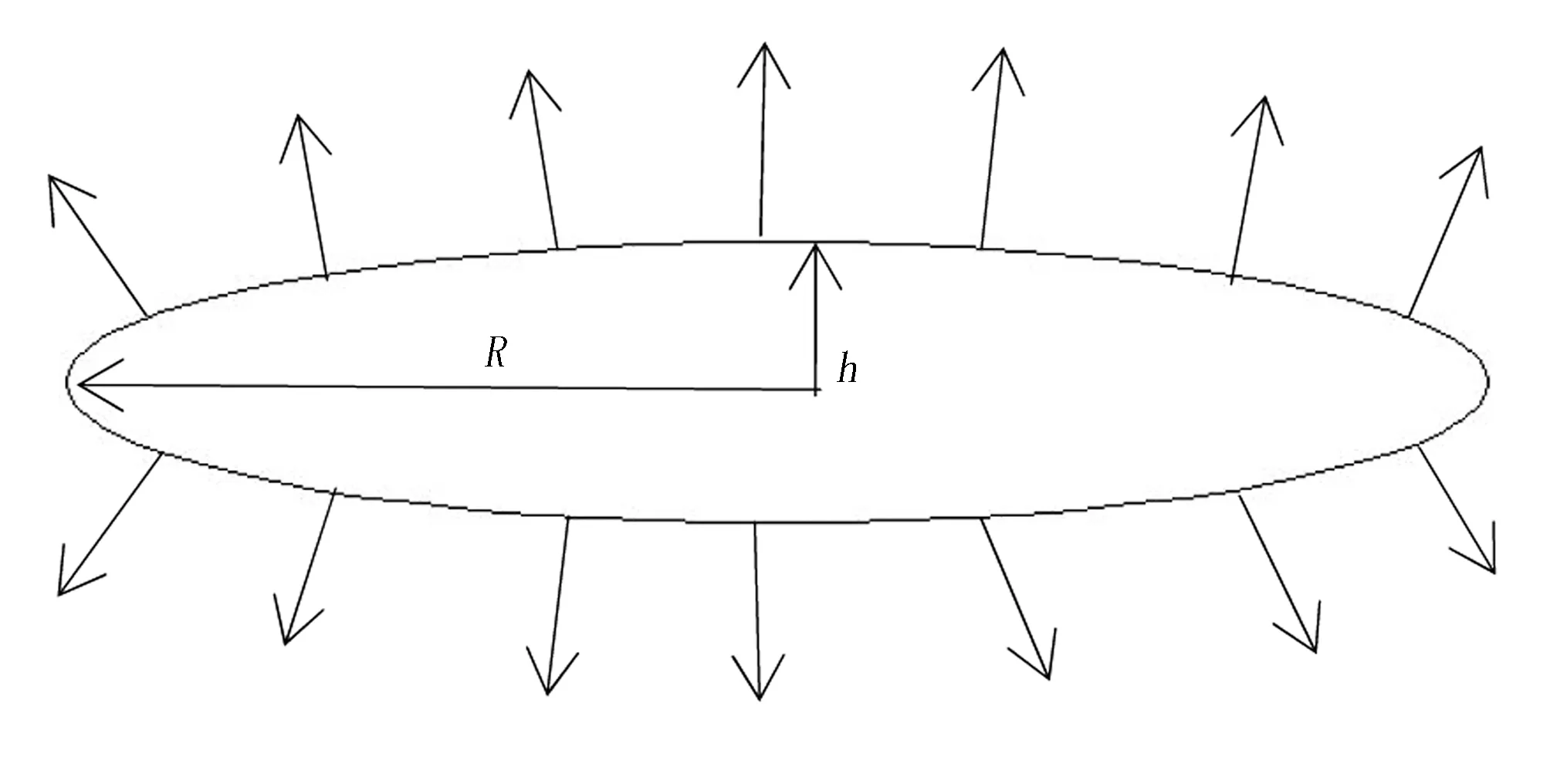
图3 裂隙扩展模型Fig.3 Crack extension model
假设作用于抬升土体的气压为均布气压,则土壤与深松铲的受力模型如图4所示。
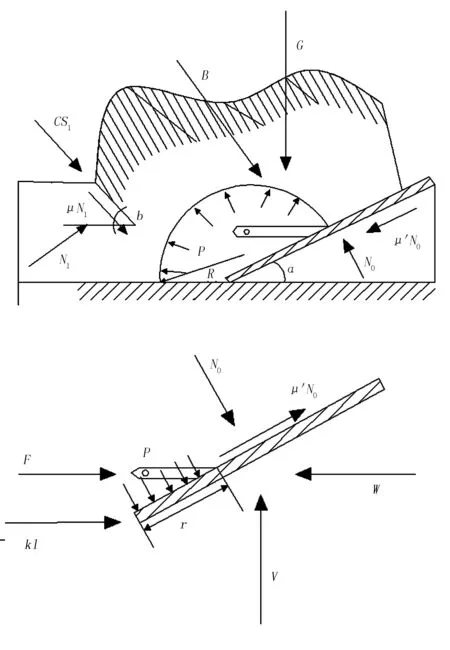
图4 高压气体劈裂下的土壤与铲面受力模型Fig.4 Model of soil and thrust surface under high pressure gas splitting
与传统深松铲和土壤受力模型相比,本文考虑了气压劈裂式深松铲面受气压劈裂土体时的反作用力及土体受气压劈裂后产生的抬升力,建立新的力学模型,列出新的平衡方程。
铲面前进作业时的作用力的平衡方程可表示为
(1)
其中,W为牵引力(N);μ′为深松铲与土壤的摩擦因数;N0为铲面的法向力;k为单位幅宽土壤的纯切削阻力(N);l为深松铲的宽度(mm);a为铲面的升角(°);r为气压分布在铲面的长度(mm)。
由于铲尖与气枪切削土壤所接触的面积很小,因此可以忽略土壤对铲尖与气枪的纯切削阻力。根据式(1),牵引阻力W′表示为
(2)
把深松铲面的土块作为研究对象,土块竖直方向上的平衡方程为
此外,为力争将工业区建成具有国际影响力的精细化工园区,公司正在制订相关方案,将对园区进行整体转型,并同时对投产企业进行评估,那些在安全环保、产业发展、节能减耗方面不能达标的企业将被要求腾笼换鸟,为园区的发展提供新的空间。
G-N0(cosa-μ′sina)-N1(cosb-μsinb)+
(CS1+B-PS)sinb=0
(3)
其中,G为土块重力(N);N1为作用于前失效面的法向载荷(N);b为前失效面的倾角(°);μ为土壤的内摩擦因数;S1为前失效面的面积(mm2);C为土壤内聚力(N);B为土壤加速力(N);P为气体压力(MPa);S为作用于土壤抬升的有效面积(mm2)。
土块水平方向的平衡方程为
N0(sina+μ′cosa)-N1(sinb+μcosb)-
(CS1+B-PS)cosb=0
(4)
联立式(2)~式(4),采用消去法可消去N0与N1,整理可得
(5)
根据文献[21],一般振动深松机的深松铲的牵引阻力可表示为
(6)
由式(6)可知:传统深松铲水平方向阻力主要来自于土壤前失效面的内聚力与土壤加速力。相比之下,气压劈裂式深松铲在通入高压气体进行作业时,当气压足够大的情况下,气压在土壤裂隙产生的抬升力可很大程度与土壤前失效面的内聚力及土壤加速力相抵消,从而大大降低了牵引阻力;随着气压在土壤缝隙膨胀产生的压强增大,土体所受的抬升力和作用在铲面的发作用力都会随之增大。根据左胜甲[19]学者对土壤气压特性的试验研究可知:高压气流在主要在裂隙的呈水平方向扩散,裂隙贯穿后近似的呈圆形状曲面。因此,作用于铲面土壤抬升的有效面积可以表示为
S=πR2
(7)
由于气体在土壤中会发生压缩和渗透,因此需对前面假设的均布气压进行优化。根据国外学者Puppala基于抬升张拉机理的推出裂隙宽度计算公式[23]可得
(8)
学者Nautiyal提出的高压气体分布方程,在rn+1处注气点的气体分布为[24]
(9)
其中,Pn+1为在注气点rn+1处的高压气体压力(MPa);Pn为在注气点处rn的高压气体压力(MPa);Q为注气点rn+1与注气点rn之间的流量(m3/s);μgas高压气体粘滞系数;ρ为气体密度(kg/m3)。
把式(7)带入到式(8),可得到Pn+1处的气压。假定在理想情况下气压的压差根据在注气点的距离呈圆环分布,把气体作用在裂隙面使土体抬升的有效面积分为无数n个细小圆环,故整个土体裂隙扩展抬升的气体分布压力可表示为
(10)
土体抬升时,牵引阻力可以表示为
(11)
当抬升力大于土壤前失效面内聚力、土壤自重及土壤加速力的合力时,铲面土体发生抬升。根据抬升张拉机理[25],当土体的有效最小主应力呈负值且大于土体的抗拉强度时,土体发生纵向劈裂直至土块表面,此时抬升力等于上面所述土壤3个力的合力达到平衡状态,土体孔隙度达到最大值。因气枪附近铲面为凿型铲的形态,气压作用在铲面的面积远小于土体抬升的有效面积,因此气压对铲面的作用力远小于土壤3个力的合力,可忽略不计,存在一个前失效面面积减小系数X与气体泄漏气压减小系数Y,均大于0小于1。因此,抬升完成后,牵引阻力可以表示为
(12)
根据张昭、郭金龙等[21]通过研究深松铲面土壤的速度与几何关系,推导出土块的重力与土块加速力及前失效面面积的表达式[26],即
(13)
L3=d1tana
其中,f为土壤容重;L2为铲面长度(mm);d为土壤扰动系数(mm)。
(14)
其中,g为重力加速度;t为时间(s);v0为深松铲速度(m/s)。
(15)
将式(14)~式(16)代入到式(13),可得牵引阻力表达式为
(16)
由式(16)可知:牵引阻力的主要影响因素为注入土壤内部的气压、铲面的长度与宽度、土壤的内聚力、土壤扰动系数及深松铲行进速度。
3 气压劈裂式深松铲结构有限元分析
由于气压劈裂式深松铲铲头装配有气枪且铲面采用凿型与双翼箭型复合的形态设计,因此需要运用有限元分析软件进行静力学分析与动力学分析来验证设计的合理性。
3.1 静力学分析
气压式深松铲的铲头选用具有很强耐磨性的65Mn材料,弹性模量为206GPa,泊松比为0.3,密度为7 850kg/m3。固定铲柄上端的3个螺纹孔为固定边界,设定在耕深350mm的犁底层进行作业,铲头所受的深松阻力按气枪未通入高压气体时所受的最大阻力来计算,即气压为0。根据阻力计算公式(17)可得,深松阻力为2 248N。由于深松阻力主要集中在铲面,土壤受气压劈裂后,孔隙度增大,铲柄与土壤的接触面较小,可忽略铲柄与土壤的接触阻力。分析结果如图5、图6所示。

图5 应力云图Fig.5 The stress nephogram
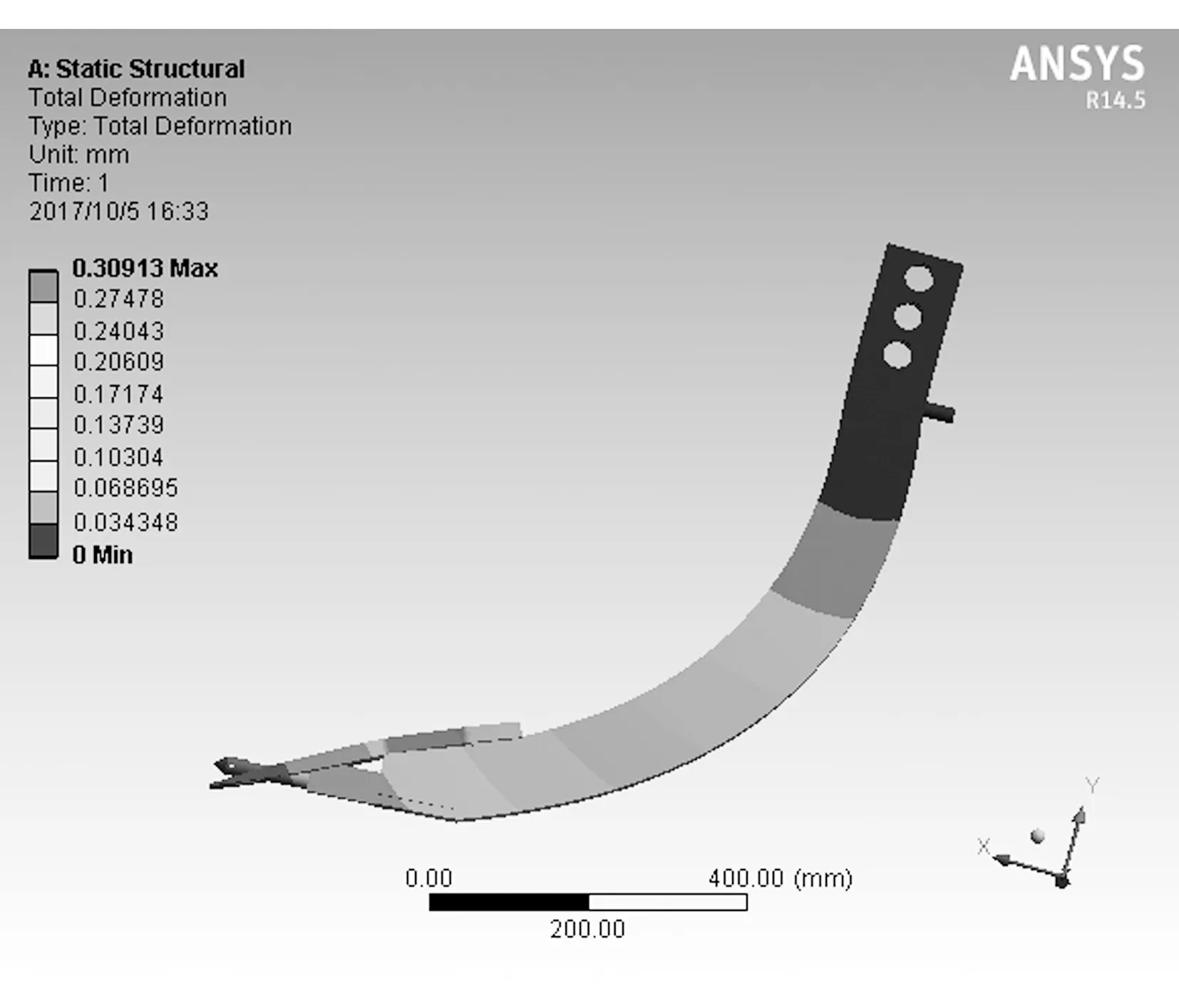
图6 应变云图Fig.6 Strain cont
由图5、图6可知:气压式深松铲应力主要集中在铲柄上端第3个螺纹孔,最大应力为24.343MPa,远小于Mn材料的屈服应力235MPa;最大位移发生在铲头的铲尖出,最大变形量为0.3mm,相对应整体深松铲整体长度,可以忽略不计。因此,气压劈裂式深松铲的设计合理。
3.2 整体结构动力学分析
将静力学分析的模型与材料导入到Mode模块,同样3个螺纹孔为固定边界,求解分析得到前4阶的模态分析结果如图7所示。
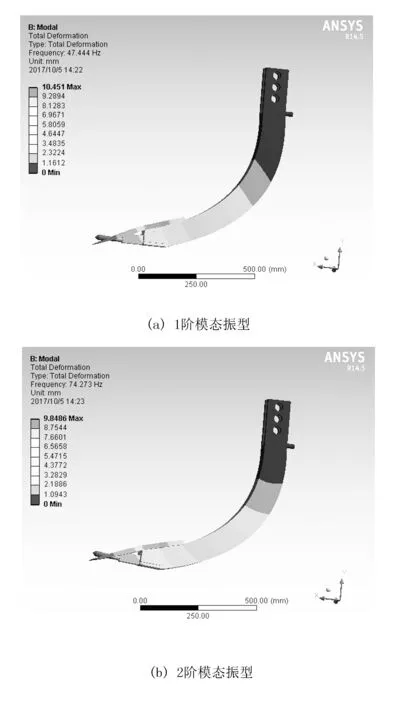
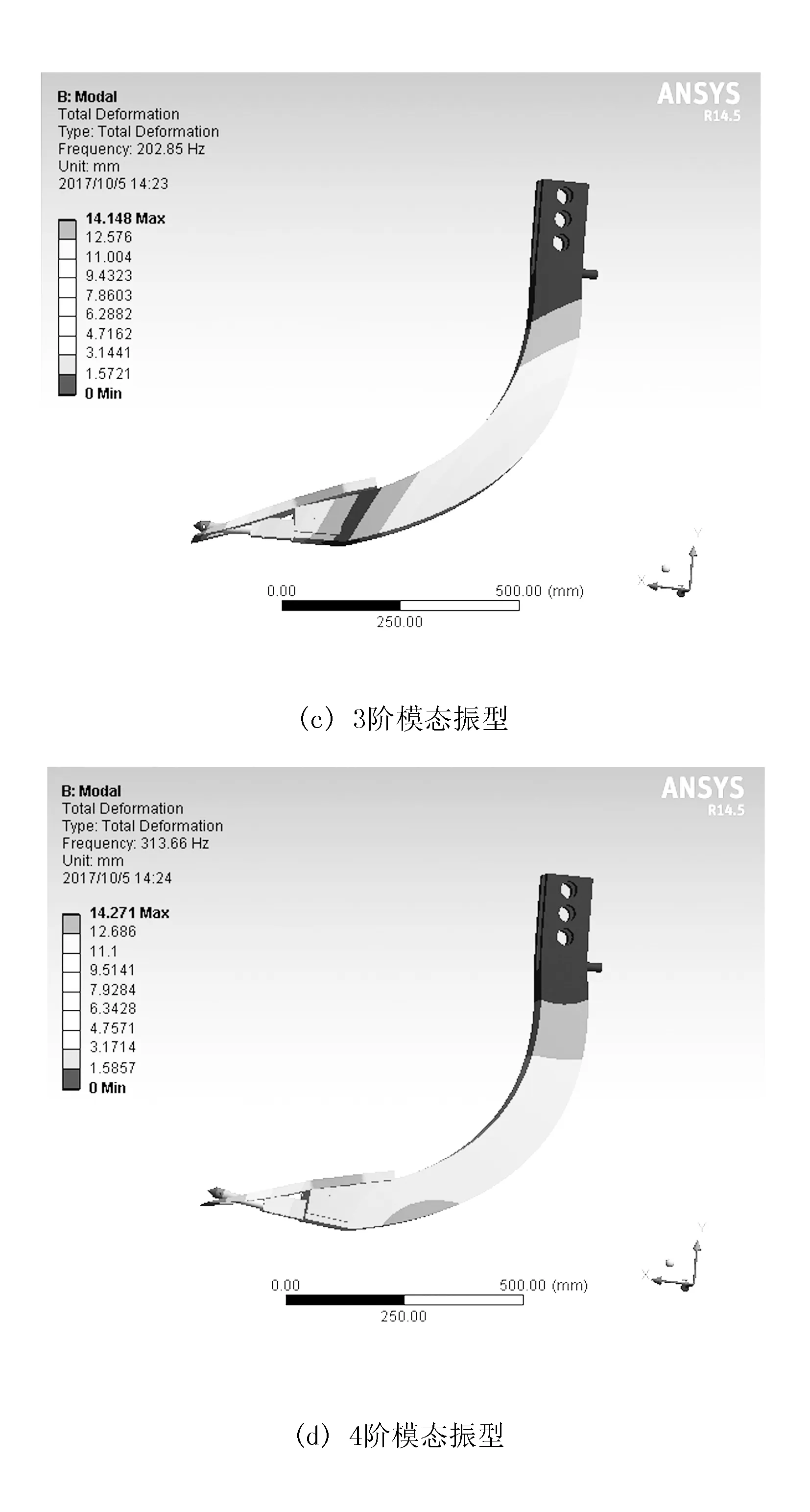
图7 气压式深松铲前4阶模态图Fig.7 The first 6-order modal diagram of the pressure-type deep-spatula
由图7可知:模型固有频率第1阶为47.4Hz,第2阶为74.2Hz,第3阶为202.85Hz,第4阶为313.6Hz。前4阶主要是铲头发生弯曲变形,铲柄架上的激振器的激振频率一般为6~12Hz,与模型的固有频率相差较大,不会发生共振,验证了设计的合理性。
4 结论
1)针对气压劈裂式深松铲,建立了铲面与土壤在气压作用下的受力模型,分析了气压劈裂式深松铲对土壤的劈裂减阻机理,推导出了该种型式的深松铲在作业时牵引阻力的计算公式,结果表明:增大气压可以有效地降低牵引阻力。
2)结合如图1所示的复合形态结构的深松铲,运用有限元软件对气压劈裂式深松铲进行静力学分析、动力学分析,从结构强度及结构是否发生共振的角度,进一步验证了本文所提出气压劈裂式深松铲结构设计的合理性。
猜你喜欢
幼儿画刊(2021年5期)2021-12-02 04:24:04
昆明医科大学学报(2021年5期)2021-07-22 07:32:54
地震研究(2021年1期)2021-04-13 01:04:52
模具制造(2019年4期)2019-06-24 03:36:46
中国眼镜科技杂志(2018年1期)2018-02-08 02:15:28
喜剧世界(2016年3期)2016-11-26 13:13:01
中国社会历史评论(2016年1期)2016-06-27 07:34:28
电影新作(2016年1期)2016-02-27 09:16:48
浙江大学学报(工学版)(2015年7期)2015-03-01 01:18:55
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:09
