
基于SVM-BSA的光环境调控模型的构建
2019-12-19 02:05吴与玮何思梦
科技创新与应用 2019年35期
关键词:支持向量机
吴与玮 何思梦
摘 要:植物的生长环境对提高植物经济效益具有重大意义。近年来的研究表明,光合速率是验证植物有效光合作用的重要参数,因此将环境因子作为参量构建光合速率模型成为现阶段的研究重点。文章通过支持向量机找寻出温度、CO2浓度、光子通量密度与光和呼吸速率之间的对应关系,在这个基础上,使用鸟群算法完成对光环境最优目标值进行寻优,并完成光环境最优模型的构建。模型预测数据与实际量测数据的拟合结果的决定系数为0.989,均方误差为14.58,表明本文构建的光合速率模型可以有效根据环境参数计算出植物的最优光饱和点,为农业大棚环境的精准调控提供依据。
关键词:支持向量机;鸟群算法;光环境调控;设施大棚
中图分类号:TP391.7 文献标志码:A 文章编号:2095-2945(2019)35-0057-04
Abstract: The environment for plant to grow is of great significance to improve plant economic benefits. In recent years, studies have shown that photosynthetic rate is an important parameter to verify plant effective photosynthesis, so the construction of photosynthetic rate model based on environmental factors has become the focus of research at the present stage. In this paper, the corresponding relations among temperature, CO2 concentration, photon flux density and light and respiration rate are found by support vector machine. On this basis, the bird swarm algorithm is used to optimize the optimal target value of light environment and complete the construction of the optimal model of light environment. The determination coefficient of the fitting result between the predicted data and the actual measured data is 0.989, and the mean square error is 14.58, indicating that the photosynthetic rate model constructed in this paper can effectively calculate the optimal light saturation point of plants according to environmental parameters. The purpose of this paper is to provide a basis for the precise regulation and control of agricultural greenhouse environment.
Keywords: support vector machine; bird swarm algorithm; light environment control; facility greenhouse
引言
光合呼吸速率是植物生長过程中进行有效光合速率的主要参考依据。在光照强度过高的情况下,会导致植物的叶片气孔闭合,使得植物光合速率值降低[1-2]。而在光最优模型的构建,首先利用SVM算法对光合速率与CO2浓度、温度与光饱和点之间的光照强度不足的条件下,植物光合速率会下降。
在不同的环境下植物所需的光照强度是一个动态变化的值。因此研究周围环境因子对植物的光合作用速率的影响具有重要意义[3]。
近年来,对于该领域不断进行研究,提出了很多有关光环境控制的理论,为本文的研究奠定了基础。Ryo Matsuda研究了对在不同温度下以及不同光合作用周期里光合速率的区别[4]。Maryam Haghighi研究了在水培条件下温度差异对番茄生长的影响。L,mata等人通过对植物的光合作用机理的研究,分析了环境因子对于植物光合速率的影响[5]。Zhang Jing等人通过多元回归分析方法构建了番茄光合作用模型,分析了环境因子对番茄光合作用的影响。Afiatdoust, F等基于遗传算法获得了径向基函数的最优变量形状参数[6]。Patel, Narendra等将改进型遗传算法应用于最优控制问题,解决了非等温塞流反应器的最优控制问题,这些研究都是通过遗传算法完成寻优过程[7]。
本文将采用支持向量机算法(Support Vector Maching,SVM)和鸟群算法(Bird Swarm Algorithm, BSA)相结合的方式来进行光环境关系进行计算,构建出以CO2浓度、温度与光饱和点为输入,光合速率为输出的模型。将实际环境下的CO2浓度、温度代入上述模型获得光子通量密度与光和呼吸速率之间的关系,然后通过鸟群算法需求当前环境下的光饱和点。
最终,拟合在不同环境下获取的最优光饱和点构成光环境最优模型。
1 基于SVM构建的光合速率模型
1.1 基于SVM的光合速率模型的建立
植物的光合速率与环境中的光子通量密度、温度和CO2浓度三者之间存在着非线性的关系。SVM是机器学习中常用的数据处理算法之一,常用于非线性的分类与回归问题,其核心思想就是找出最优的超平面,使得靠近超平面且难分点的数据点间距最大[8-9]。由于SVM使用核方法从低维映射到高维,模型复杂度不受到维数影响,因而可以用来预测植物的光合速率。
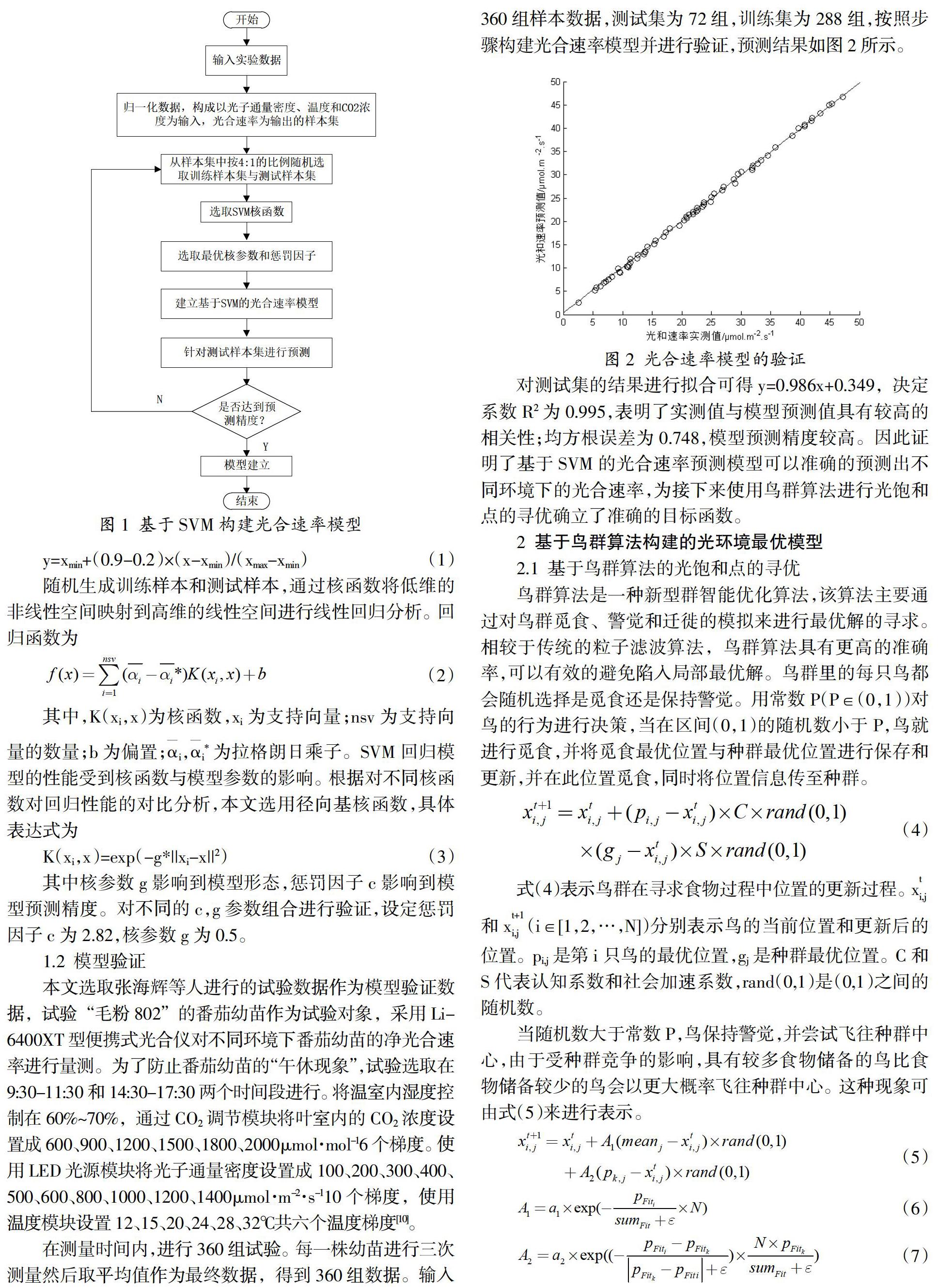
使用SVM构建光合速率模型的主要步骤如下:归一化处理,建立预测样本集与训练样本集,核函数和惩罚因子的选取,模型训练,如图1所示。
1.2 模型验证
本文选取张海辉等人进行的试验数据作为模型验证数据,试验“毛粉802”的番茄幼苗作为试验对象,采用Li-6400XT型便携式光合仪对不同环境下番茄幼苗的净光合速率进行量测。为了防止番茄幼苗的“午休现象”,试验选取在9:30-11:30和14:30-17:30两个时间段进行。将温室内湿度控制在60%~70%,通过CO2调节模块将叶室内的CO2浓度设置成600、900、1200、1500、1800、2000μmol·mol-16个梯度。使用LED光源模块将光子通量密度设置成100、200、300、400、500、600、800、1000、1200、1400μmol·m-2·s-110个梯度,使用温度模块设置12、15、20、24、28、32℃共六个温度梯度[10]。
在测量时间内,进行360组试验。每一株幼苗进行三次测量然后取平均值作为最终数据,得到360组数据。输入360组样本数据,测试集为72组,训练集为288组,按照步骤构建光合速率模型并进行验证,预测结果如图2所示。
对测试集的结果进行拟合可得y=0.986x+0.349,决定系数R2为0.995,表明了实测值与模型预测值具有较高的相关性;均方根误差为0.748,模型预测精度较高。因此证明了基于SVM的光合速率预测模型可以准确的预测出不同环境下的光合速率,为接下来使用鸟群算法进行光饱和点的寻优确立了准确的目标函数。
2 基于鸟群算法构建的光环境最优模型
2.1 基于鸟群算法的光饱和点的寻优
BSA算法常数P设置为0.6,a1和a2均設置为1.5,C和S均设置为1,迁移周期设置为5,最大迭代次数设置为100。
其详细步骤如下:
步骤一 设定当前环境的温度和CO2浓度To,Co,构建出当前的适应度函数。
步骤二 基于当前环境随机生成初始种群、最大迭代次数等参数。
步骤三 使用当前适应度函数计算初始种群的适应度。
步骤四 通过鸟群算法对种群进行更新,并寻求更优的参数xi并更新参数。
步骤五 使用更新后的参数xi进行适应度计算,对比获取最优适应值后保存。
步骤六 返回到步骤四继续进行迭代,直至适应度达到稳定值或者满足终止条件。
步骤七 完成当前环境下最优适应度的计算,输出当前最优参数xi与最优适应度F。设定下一组温度和CO2浓度To,Co,构建新的适应度函数,返回步骤一。直至完成全环境范围内的光饱和点寻优。
2.2 光环境最优目标值模型的建立
基于BSA优化算法的寻优结果,可得到不同生长环境条件下的光饱和点。以温度、CO2浓度为输入,光响应曲线曲率最大值处光子通量密度和光饱和点光子通量密度为输出,采用SVR进行建模。按4:1的比例随机分配为训练集与测试集,训练集样本为80,测试集样本为20。训练结果如表1所示。
3 模型验证
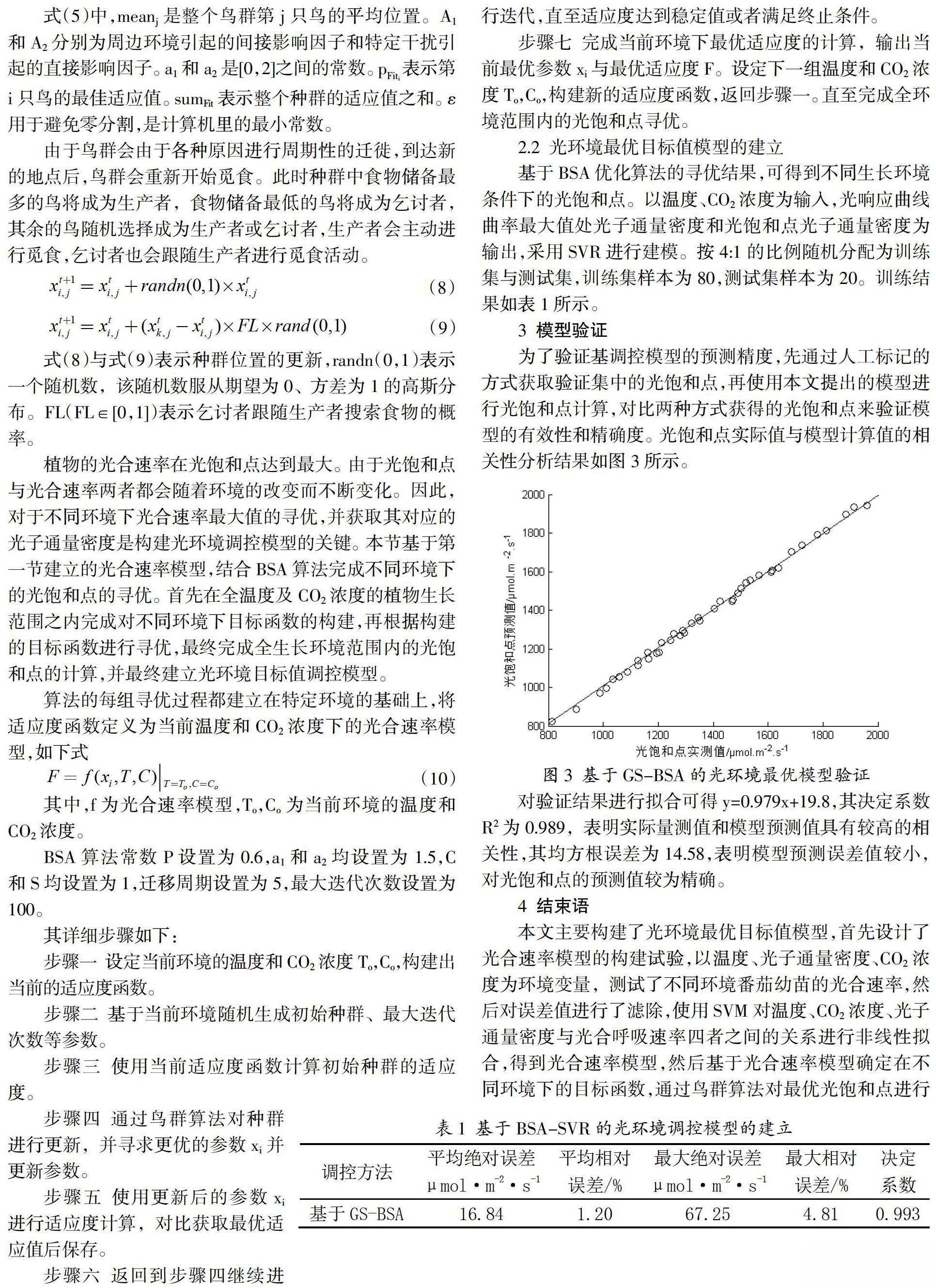
为了验证基调控模型的预测精度,先通过人工标记的方式获取验证集中的光饱和点,再使用本文提出的模型进行光饱和点计算,对比两种方式获得的光饱和点来验证模型的有效性和精确度。光饱和点实际值与模型计算值的相关性分析结果如图3所示。
对验证结果进行拟合可得y=0.979x+19.8,其决定系数R2为0.989,表明实际量测值和模型预测值具有较高的相关性,其均方根误差为14.58,表明模型预测误差值较小,对光饱和点的预测值较为精确。
4 结束语
本文主要构建了光环境最优目标值模型,首先设计了光合速率模型的构建试验,以温度、光子通量密度、CO2浓度为环境变量,测试了不同环境番茄幼苗的光合速率,然后对误差值进行了滤除,使用SVM对温度、CO2浓度、光子通量密度与光合呼吸速率四者之间的关系进行非线性拟合,得到光合速率模型,然后基于光合速率模型确定在不同环境下的目标函数,通过鸟群算法对最优光饱和点进行寻优,从而获得不同环境下的最优光饱和点,进而完成光环境最优目标值模型的构建。经过验证,表明本文建立的光环境最优模型具有较高的预测精度,为设施大棚的光环境调控提供了有效依据。
参考文献:
[1]于海业,孔丽娟,刘爽,等.植物生产的光环境因子调控应用综述[J].农机化研究,2018,40(8):1-9.
[2]张东来,张玲,葛文志.不同光环境对胡桃楸幼苗生物量及光合生理的影响[J].森林工程,2017,33(5):8-11.
[3]张静,王双喜.温室番茄光合作用模拟模型中环境因子的影响[J].农机化研究,2011,33(7):57-59.
[4]Afiatdoust F, Esmaeilbeigi M. Optimal variable shape parameters using genetic algorithm for radial basis function approximation[J]. Ain Shams Engineering Journal, 2015, 6(2):639-647.
[5]Changdar C , Mahapatra G S , Pal R K . An improved genetic algorithm based approach to solve constrained knapsack problem in fuzzy environment[J]. Expert Systems with Applications, 2015, 42(4):2276-2286.
[6]Haghighi M, Abolghasemi R, Silva J A T D. Low and high temperature stress affect the growth characteristics of tomato in hydroponic culture with Se and nano-Se amendment[J]. Scientia Horticulturae, 2014, 178(178):231-240.
[7]Wu J, Hao Y. Linear Regression-Based Efficient SVM Learning for Large-Scale Classification[J]. IEEE Transactions on Neural Networks & Learning Systems, 2017, 26(10):2357-2369.
[8]司刚全,李水旺,石建全,等.采用改进果蝇优化算法的最小二乘支持向量机参数优化方法[J].西安交通大学学报,2017,51(6):14-19.
[9]付光远,辜弘炀.基于数据分布特性的支持向量机核参数选择方法[J].计算机应用,2017,37(s1):103-105.
[10]刘翔.基于光温耦合的设施光环境检测与智能调控系统设计[D].2015.
[11]孟令通,朱洪渊,蒋祖华,等.基于遗传算法的平板车调度优化方法[J].哈尔滨工程大学学报,2018,39(3):554-560.
猜你喜欢
现代电子技术(2016年23期)2017-01-12
现代电子技术(2016年23期)2017-01-12
无线互联科技(2016年13期)2017-01-10
中国水运(2016年11期)2017-01-04
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
价值工程(2016年29期)2016-11-14
科学与财富(2016年28期)2016-10-14
考试周刊(2016年53期)2016-07-15
