基于移动LiDAR点云的树木三维重建
2019-12-11 08:41翟晓晓张吴明靳双娜
中国农业信息 2019年5期
翟晓晓,邵 杰,张吴明,靳双娜
(北京师范大学遥感科学国家重点实验室,北京师范大学地理科学学部遥感科学与工程研究院,北京100875)
关键字:移动激光雷达;同时定位与构图;树木;三维重建
0 引言
作为农林树木调查的关键,树木三维结构的变化对林木自身的光合作用、蒸腾作用,以及地表生物量和林分生态环境等具有一定影响,并且在物质交换和能量传递过程中发挥重要作用[1-2]。农林树木三维结构的准确描述是农林生态学研究的重要科学基础,也是提出科学有效的农林经营与管理策略的迫切需求[3]。因此,准确、完整地获取树木三维结构信息是农林生态研究、监测和评价要解决的重要问题。
以航空测量和卫星遥感为代表的光学遥感技术为农林调查提供了丰富的影像信息,能够获取大区域内树木生长因子和生态、环境信息,然而光学遥感技术获取三维结构参数的能力有限,仅能反演水平结构信息,难以获取垂直维度的信息[4-5]。激光雷达(Light Detection and Range,LiDAR)是20世纪60年代发展起来的一项技术,激光脉冲也因具备一定的穿透力和抗干扰性,使其在获取树木垂直结构信息方面有着光学遥感无法比拟的优势。作为一种主动遥感技术,激光雷达遥感技术也被广泛地应用于林木资源调查[6-7]。由于能够获取周围空间大量mm级精度的三维点云,地基激光雷达在近十几年来已经被越来越多地应用于农林调查当中[8]。然而,树木之间的遮挡使地基激光雷达在农林环境中的扫描范围受限,往往需要设置多站扫描来代替单站扫描获取详细的树冠下层垂直结构信息[9]。一般情况下,多站扫描需要进行预扫描准备,如扫描站点、人工靶标以及辅助设施的布设[10],降低了地基激光雷达的工作效率。移动激光雷达扫描仪可降低遮挡带来的影响,且因其快速、高效的数据采集特点逐渐被应用到农林调查当中。在快速构建林木三维结果的同时保证数据质量和精度,是移动激光雷达系统在林木调查应用中需要面对的问题。为此,文章利用同时定位与构图(Simultaneous Localization and Mapping,SLAM)技术实现基于移动LiDAR点云的农林样地树木三维快速重建。
1 材料与方法
1.1 研究区概况
研究区地处河北省承德市塞罕坝国家机械林场,如图1所示。该区域属于典型的半干旱半湿润寒温性大陆季风气候,年均气温-1.3℃,年均降水量460.3 mm,平均海拔在1 010~1 939.9 m。土壤类型以山地棕壤、灰色森林土和风沙土为主,处于森林—草原交错地带,植被类型多种多样,分别为落叶针叶林、长绿针叶林、针阔混交林、阔叶林、灌丛、草原与草甸和沼泽及人生群落。
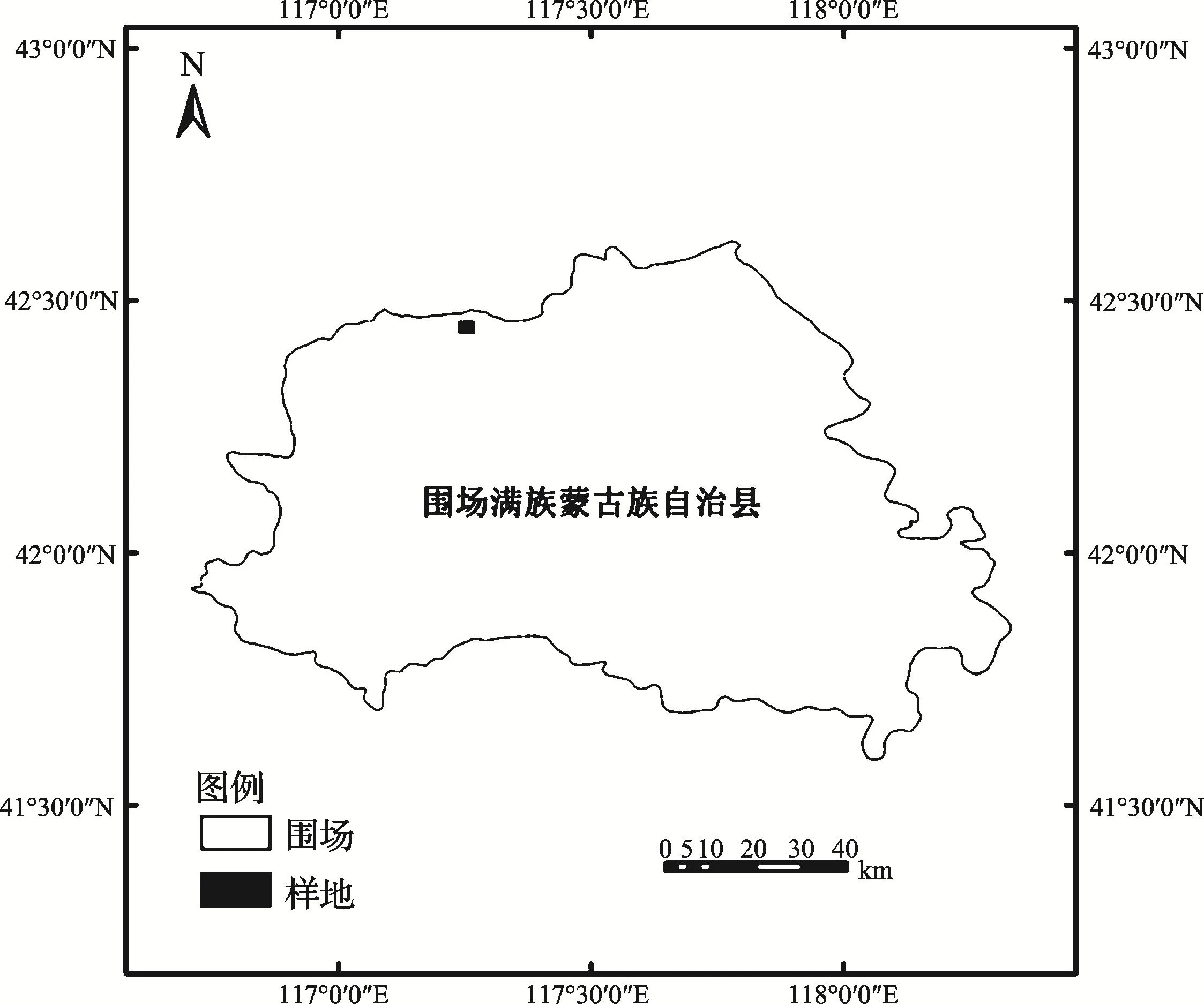
图1 研究区位置Fig.1 Study area
1.2 数据获取
试验利用Velodyne VLP-16激光雷达扫描仪,该扫描仪共16通道,测量范围在100 m左右,测量精度为±3 cm,支持两次回波。垂直测量角度范围为30°(-15~+15°),垂直方向角度分辨率为2°;水平方向测量角度范围为360°,水平角度分辨率为0.1~0.4°;激光波长为905 nm,安全等级为1级人眼安全级别,激光雷达的扫描频率被设置为10 Hz。试验选取一块25 m×25 m大小的样地,样地树木种类为落叶松,通过交叉穿越的移动方式共获取1 900帧移动激光点云数据。此外,试验还获取了多站地基激光雷达数据,以验证移动激光雷达重建样地树木三维结构的精度。
1.3 研究方法
SLAM是在没有环境先验信息的情况下,构建环境模型,并估算传感器自身运动。该文基于图优化SLAM方法进行了样地树木三维结构重建,即实现1 900帧移动激光点云数据的拼接,主要涉及两方面内容[11]:激光里程计和全局优化,又称为前端和后端。其中,激光里程计用来反映相邻点云间的变换关系,包括平移和旋转;全局优化用于消除连续点云拼接所带来的累积误差[12]。SLAM技术实现过程包括特征选取、特征匹配、位姿估计以及全局优化4个步骤。
(1)特征选取:选用点特征进行传感器运动估计。首先,根据传感器特点,基于垂直分辨率对所获点云进行分层处理;按照水平扫描范围,将每层点云集均匀划分为若干个子点云集;基于各点深度及其邻近点的深度计算该点深度变化率,取各子点云集中深度变化率最大或最小的点作为关键点特征。
(2)特征匹配:针对当前帧点云中的关键点,利用kdtree搜索各关键点在上一帧点云中的最邻近点,并将其作为关键点的初始对应点。为了降低初始对应点对误差,首先借助迭代最邻近算法进行相邻帧点云的匹配。
(3)位姿估计:构建对应点对间的变换关系,利用最小二乘法最小化对应点对间的欧式空间距离,从而计算出两帧点云间的变换。
(4)全局优化:采用一种基于累积地图的优化方法实现所有LiDAR点云的全局优化。以第一帧LiDAR点云作为基准,按上述步骤计算第二帧点云与第一帧点云间的变换,并将其转换到基准坐标系下与第一帧点云融合,生成累积地图,同时将该累积地图作为新的基准;以此类推,将后续移动LiDAR点云分别与累积地图进行拼接。
基于以上步骤,不仅可以估算出每一帧点云在基准坐标系中的位姿,还可以基于位姿信息将所有点云转换到基准坐标系下,实现样地构图,即为同时定位和构图。
2 结果与分析
2.1 树木重建结果及精度
基于SLAM方法对采集到的1 900帧移动LiDAR点云进行拼接,实现样地树木三维结构重建,结果如图2所示。
从图2可以看出,基于SLAM技术可以实现移动LiDAR点云的样地树木三维结构重建,且样地中的单木可以被准确重建,无明显偏差。为了对重建结果进行定量评估,该文以树干位置偏差评估重建结果在水平方向上的精度,以树枝位置偏差评估重建结果在垂直方向上的精度。首先,通过手动方式将移动LiDAR点云重建的结果与地基激光点云数据进行拼接;然后,取离地面1.3 m处树干点云拟合出的中心作为树干位置,计算移动激光点云和地基激光点云得到的对应中心点水平距离;同时,分别从两组数据中的树枝上提取一定量的同名特征点,并计算所提同名点对之间的垂直距离。精度统计如表1所示。

图2 树木重建结果Fig.2 Trees reconstruction results

表1 树木重建结果精度Table 1 The accuracy of trees reconstruction results
从表1可知,该样地树木三维重建结果在水平方向上的平均绝对误差为0.038 m,最大绝对偏差为0.051 m,显示了cm级别的水平精度,其中标准偏差为0.007 4 m,表明所选树干位置偏差值具有一定的稳定性。另外,垂直方向上的平均绝对误差为0.017 m,最大绝对误差为0.042 m,相对于水平精度,垂直方向显示出了更高的精度。需要注意的是,在实际操作中,手动拼接结果也会为精度统计引入一定的随机误差。
2.2 树木结构参数分析
树干结构参数反演是激光雷达在树木测量中的重要应用,为了评估移动激光雷达数据在树木测量应用中的有效性,该文从重建结果中进行了树干胸径的拟合,并与从地基激光雷达点云中拟合出的树干胸径进行对比,利用一元线性回归分析判断两者间的相关性,结果如图3所示。其中,获取树干1.3 m处的点云数据,并投影到二维平面,利用最小二乘法进行圆拟合,将得到的直径作为树干胸径。
试验共选取了17棵树用于树干胸径的相关分析。分析结果显示,观测值和真实值间的决定系数为0.546 9(图3a),均方根误差(RMSE)为1.48 cm,平均绝对误差(MAE)为1.29 cm。由于获取样地边缘树木点云的不完整,一些单木的胸径观测值与真实值之间存在相对较大的差异,因此,该文舍弃观测值大于或小于真实值8%的树干,并重新进行树干胸径观测值与真实值间的相关性分析(共3棵树干被舍弃),其中,决定系数增加到0.715 6(图3b),均方根误差和平均绝对误差分别降低到1.12和1.01 cm。总体而言,基于移动LiDAR点云的树干胸径拟合精度可达到1 cm左右,具有较高的可靠性。
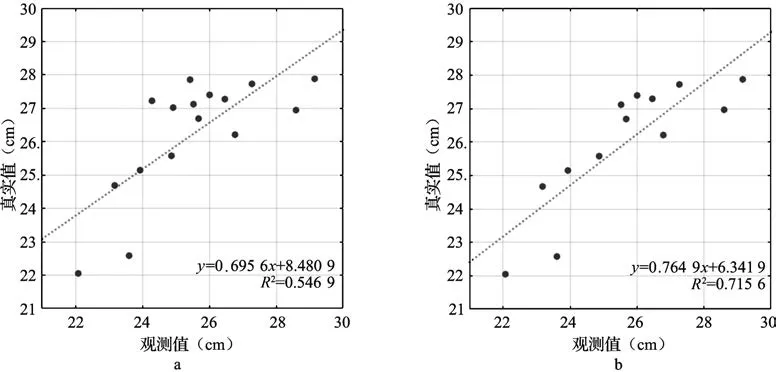
图3 树干胸径对比,将移动激光点云拟合出的树干胸径作为观测值,地基激光点云拟合处的树干胸径作为真实值:a.为试验选取的所有树干胸径对比;b.为舍弃较大偏差后的树干胸径对比Fig.3 Comparison of trunk diameters at breast height
3 结论
基于激光雷达技术的树木三维结构重建对精准农林调查具有重要意义,高效率的树木三维重建是现代化果园精准管理、森林树木调查的技术基础。为了实现高效快速的农林树木三维重建,该文基于移动LiDAR点云,借助图优化SLAM方法实现了样地级树木三维重建。以高精度的地基LiDAR数据作为参考,试验结果显示了该方法对农林树木三维结构重建的可行性,且树干胸径的对比也表明了移动LiDAR点云数据在农林树木测量中的有效性。尽管该文实现了移动LiDAR点云的树木三维重建,但由于单个激光扫描仪垂直视场角的限制,试验获取的点云数据多局限于树干部分,难以获取到完整的冠层结构信息。因此,联合多个激光扫描仪的树木三维重建将是接下来工作的重点。
猜你喜欢
声屏世界(2022年17期)2022-12-18
声屏世界(2022年15期)2022-11-08
天津农林科技(2022年2期)2022-04-19
林业科学研究(2021年6期)2022-01-05
内蒙古林业调查设计(2021年5期)2022-01-05
北京航空航天大学学报(2021年6期)2021-07-20
林业科技情报(2021年2期)2021-07-13
中华养生保健(2020年7期)2020-11-16
软件(2020年3期)2020-04-20
天津农林科技(2019年5期)2019-10-29