基于高光谱遥感的农作物分类研究进展
2019-12-11 08:41赵小娟
中国农业信息 2019年5期
张 影,赵小娟,王 迪※
(1. 中国农业科学院农业资源与农业区划研究所/农业农村部农业遥感重点实验室,北京100081;2. 青海省农牧业遥感中心,西宁810008)
0 引言
我国是农业大国,农作物播种面积和产量信息是保障粮食安全、农业供给侧结构性改革的重要依据[1-2]。及时、准确地获取农作物种植面积及产量信息对优化农作物种植结构、科学制定农业政策、国家经济发展具有重要意义[3-4]。农作物种植面积是影响农作物产量的关键信息,而农作物分类与识别则是获取农作物种植面积和产量信息的核心问题[5]。传统获取农作物种植面积和产量信息的方法多以地面调查统计为主,该方法耗费大量的人力、物力、财力且调查时间过长[6-7]。遥感技术作为一门快速发展的新兴科学技术,凭借其精确、及时、宏观等优点已广泛应用于农作物类型识别中[8]。国内外学者开展了基于 MODIS[9]、Landsat/TM[10]、SPOT/HRV[11]、GF-1/WFV[12]等多光谱遥感影像进行农作物空间分布和面积提取的研究[13]。随着传感器的发展,多光谱影像的空间分辨率越来越高,但是光谱分辨率依然较低,在农作物种植结构复杂、地块破碎地区分类精度不高,且难以实现对农作物品种的分类研究[14]。而高光谱数据凭借光谱分辨率高,可以更为全面、细致地获取地物光谱特征及其差异性等优点,为农作物类型识别提供新的技术手段[15]。高光谱遥感是指电磁波谱在可见光、近红外、中红外和热红外波段范围内,利用成像光谱仪获得数十至数百个非常窄的波段信息,它们组成一条完整而连续的光谱曲线[16-17]。近年来,随着成像光谱技术的发展,利用高光谱遥感进行农作物分类研究,获取农作物种植面积信息已经成为农业遥感的重要研究领域[18]。
文章总结了国内外高光谱遥感农作物分类研究进展,分别从机载高光谱遥感农作物分类、星载高光谱遥感农作物分类、联合多源遥感数据农作物分类以及高光谱农作物分类算法进行总结,同时指出了高光谱遥感农作物分类研究中存在的问题,并提出了未来的发展方向。
1 基于单一高光谱影像的农作物分类
1.1 机载高光谱遥感的农作物分类研究
高光谱遥感用于农作物分类研究初期,大多使用单一的机载高光谱影像作为数据源,包括美国的AVIRIS、德国的ROSIS、加拿大的CASI、中国的PHI等。机载高光谱农作物分类研究中使用的数据源、研究对象等参见表1[19-28]。如张丰[19]等在2002年根据PHI高光谱图像上水稻生长期的光谱特征,采用混合决策树分类方法对江苏省常州市金坛良种场的水稻品种进行了精细分类,总体分类精度达到94.9%。刘亮[20]等以北京顺义区为研究区,使用成像光谱数据和实测地物光谱数据,通过逐级分层分类方法进行农作物分类研究,该方法首先通过NDVI指数将研究区分为植被区和非植被区,然后在不同层次上的图像分类使用不同的分类方法,各种农作物的分类精度均为95%以上。Melgani[22]等利用两种不同的支持向量机:无核变换的线性支持向量机和基于高斯径向基核函数(SVM-RBF)的非线性支持向量机,以AVIRIS数据为数据源,对玉米、大豆等农作物进行分类识别,分类精度分别为87.1%和93.42%。Tarabalka[23]等将SVM和马尔科夫随机场(MRF)结合对AVIRIS数据上的小麦、大豆、燕麦、玉米等农作物进行精细分类,该方法首先应用概率支持向量机对AVIRIS数据进行像素级分类,然后通过马尔科夫随机场正则化,利用空间上下文信息来精炼第一步得到的分类结果,分类精度为92.05%。余铭[28]等以AVIRIS高光谱数据为数据源,对美国加利福尼亚州南部萨利纳斯山谷的西兰花、玉米等农作物采用条件随机场进行分类研究。该方法利用支持向量机(SVM)分类器计算各类地物的概率,并定义为条件随机场的一元势函数以融合空间特征信息;将空间平滑项和局部类别标签成本项加入到二元势函数中,以考虑空间背景信息,并保留各类别中的详细信息,多数农作物分类精度为94%以上,总体分类精度为90.4%。机载高光谱遥感农作物分类的研究对象多为水稻、玉米、大豆等大宗粮食作物,其中还涉及对小麦品种、水稻品种的精细分类,而对一些经济作物的研究较少。虽然机载高光谱影像覆盖的面积较小,进行大面积的农作物分类研究比较困难,但是其空间分辨率较高,在高光谱农作物分类研究中仍占有重要地位。
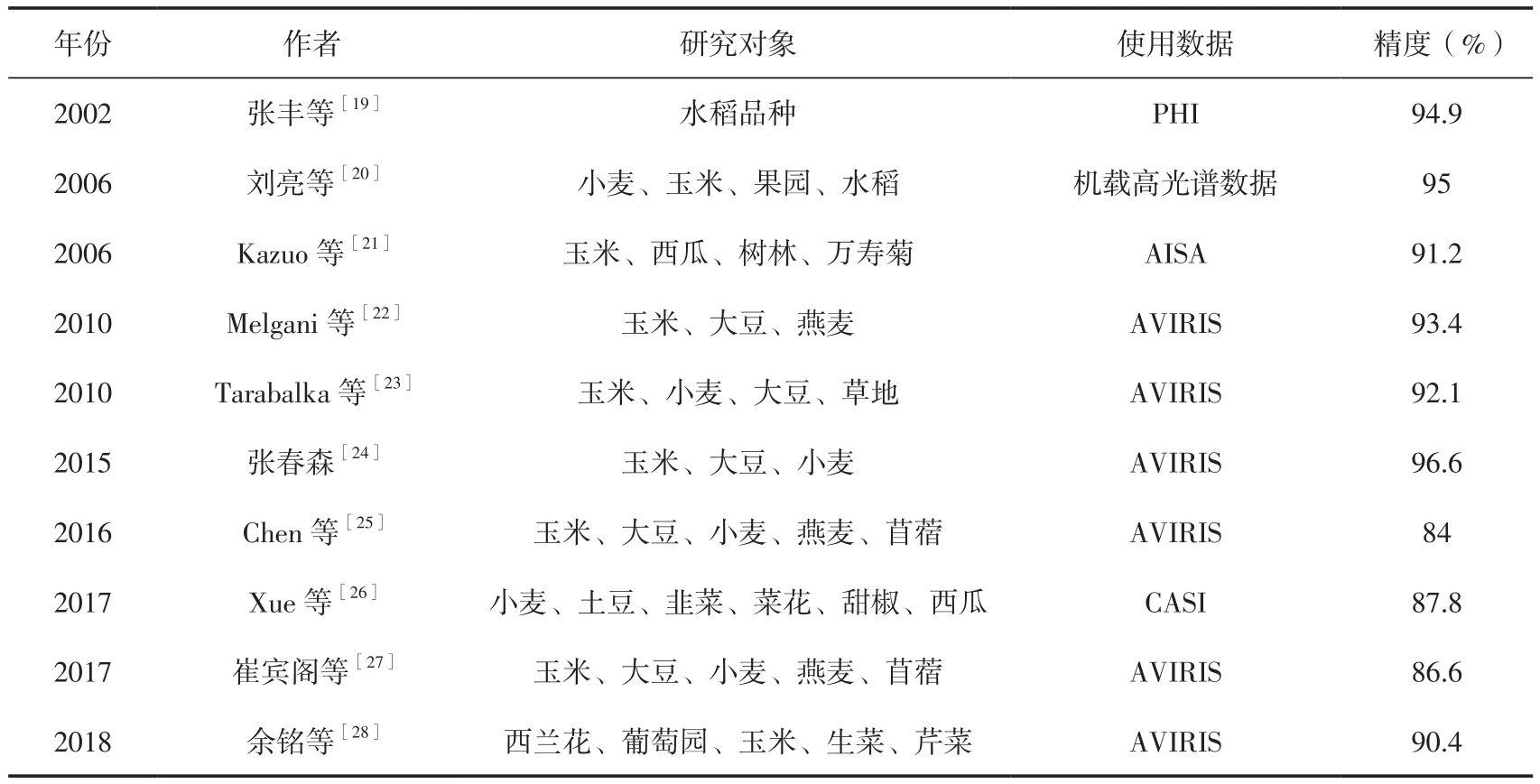
表1 2002—2018年基于机载高光谱数据的农作物分类进展Table 1 Advances in crop classification based on aerial hyperspectral data from 2002 to 2018
1.2 星载高光谱遥感的农作物分类研究
20世纪90年代末,高光谱遥感进入航天遥感阶段,各个国家开始研究发射载有成像光谱仪的卫星。美国发射了Terra、Hyperion等高光谱卫星,日本发射了ADEOS-1和ADEOS-2高光谱卫星,我国于2008年发射了搭有超光谱成像仪(HSI)的环境与灾害监测预报小卫星A星(HJ-1A)[29-30]。随着1999年美国AM-1卫星发射,星载高光谱数据开始应用于各个领域,其中在农作物分类中常见的星载高光谱影像包括美国的Hyperion数据、中国的HJ-1A数据[31]。星载高光谱农作物分类研究中使用的数据源、研究对象等参见表2[32-40]。Galva~o[32]等利用EO-1卫星上获取的高光谱数据,通过逐步回归分析法建立判别模型,对巴西东南部地区的5种甘蔗品种进行识别分类,分类精度为87.5%。李丹[33]等利用Hyperion数据,采取线性光谱混合模型和支持向量机方法提取广州市北部的荔枝种植面积,研究结果表明线性光谱混合像元分解和支持向量机结合的方法充分利用了Hyperion影像的高光谱特点,可以对地物类型繁多、地块破碎、训练样本获取不易的研究区进行农作物面积提取研究,其中荔枝的提取精度为85.3%。Bhojaraja[36]等采用光谱角匹配(SAM)分类方法在Hyperion高光谱数据上对印度卡纳塔卡地区的槟榔面积进行提取,精度为73.68%。为了提高分类精度,有学者在SAM的基础上引入新的技术进行新分类方法研究,如杨可明[37]等将谐波分析(HA)技术引入到SAM中,提出一种基于谐波分析的光谱角制图(HA-SAM)高光谱影像分类算法。该方法先利用HA技术将Hyperion影像的光谱曲线进行分解,提取低次谐波中的光谱能量特征,然后采用SAM方法进行分类,研究结果表明当分解次数为30次时,分类精度最高,且该方法的分类精度比直接使用SAM的分类精度提高了10.1%。星载高光谱数据已经走向实际应用,研究对象除了玉米、大豆等,还包括果园。由于星载高光谱影像的空间分辨率较低,导致在有些农作物分类实际应用中,星载高光谱影像的分类精度往往比机载高光谱影像分类精度低。因此通过提高星载高光谱影像的空间分辨率来提高农作物分类精度将是高光谱农作物分类研究中的重点。
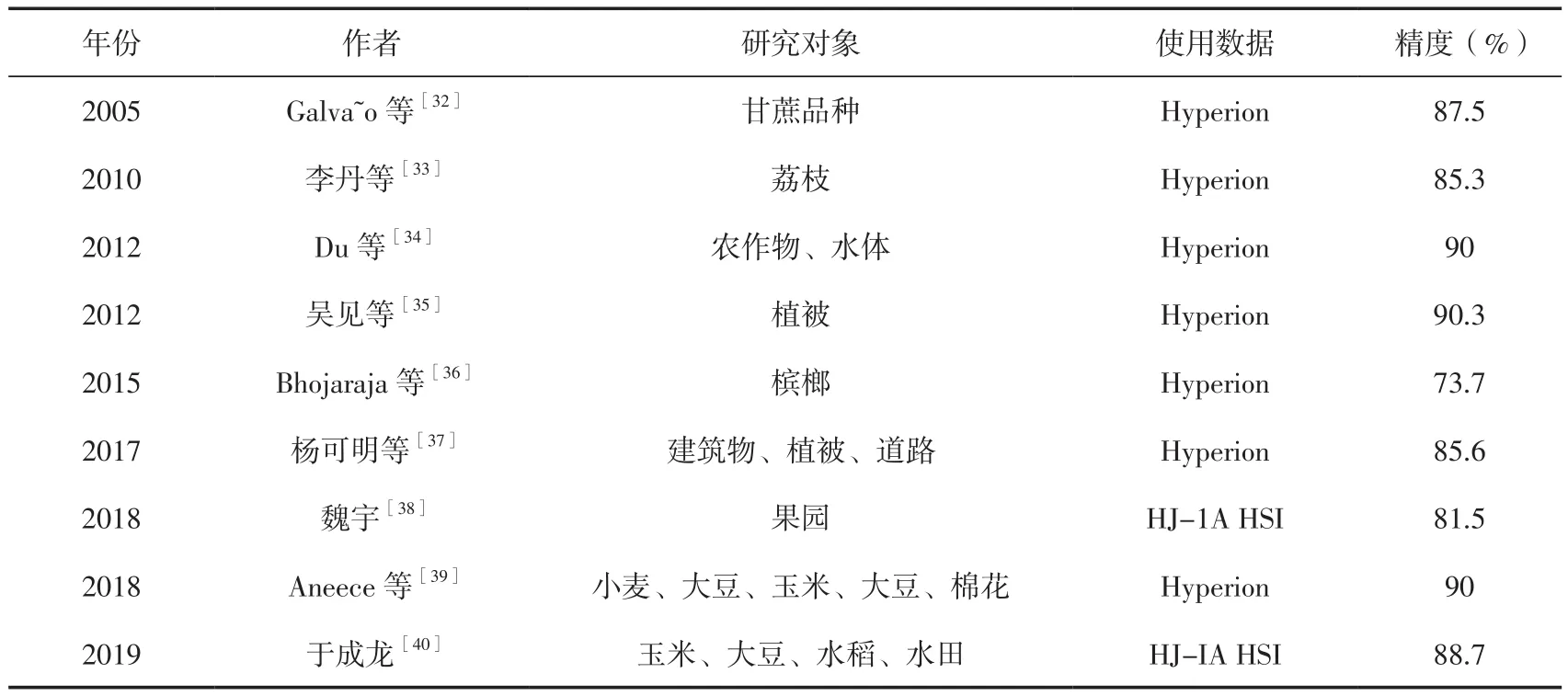
表2 2005—2019年基于星载高光谱数据的农作物分类进展Table 2 Advances in crop classification based on spaceflight hyperspectral data from 2005 to 2019
2 联合多源遥感数据的农作物分类研究
高光谱遥感成像属于光学遥感成像的范畴,因此高光谱影像会受到云雨天气的影响,而雷达成像穿透力强、不受云雨天气的影响并且激光雷达测量(LiDAR)能够快速获取地面三维坐标,生成数字高程模型(DEM),将其与高光谱遥感结合起来,可以发挥各自的优势,提高农作物分类精度[41]。联合多源遥感数据农作物分类研究中使用的数据源、研究对象等参见表3[42-47]。如Liu[43]等利用基于对象的图像分析(OBIA)范式,结合CASI高光谱数据和LiDAR数据对玉米、胡椒、土豆等农作物进行了精细分类,分类精度为90.33%。为了解决由于星载高光谱数据源较少、空间分辨率较低而使一些地形复杂、地块破碎地区分类效果达不到要求的问题,一些学者将高光谱数据和高空间分辨率、高时间分辨率的多光谱影像相结合进行农作物分类,以提高农作物分类精度。如史飞飞[44]等以HJ-1A HSI高光谱数据提取的7个光谱特征变量和高分一号(GF-1)高空间分辨率遥感数据提取的NDVI时间序列为多源数据,对青海省西宁市的农作物采用分类决策回归树(CART)和SVM方法进行分类,研究结果表明,采用多源遥感数据的总体分类精度高于单一数据源的分类精度,农作物总体分类精度分别为88.2%和84.5%。杨思睿[47]等将航拍HSI影像和LiDAR数据生成的数字表面模型(DSM)作为初始影像,对从初始影像中提取的空间特征、光谱特征以及高程信息进行融合,借助稀疏多项式逻辑回归分类器(SMLR)进行黑河流域的小麦、青稞等农作物分类,分类精度可达94.5%。高光谱、雷达和多光谱数据各有优缺点,利用多源遥感数据进行农作物分类研究,可以充分利用各种遥感影像的优点,弥补其不足,提高农作物遥感分类和识别精度。因此,利用多源遥感数据融合和深层次挖掘进行农作物的分类和识别值得进一步研究。
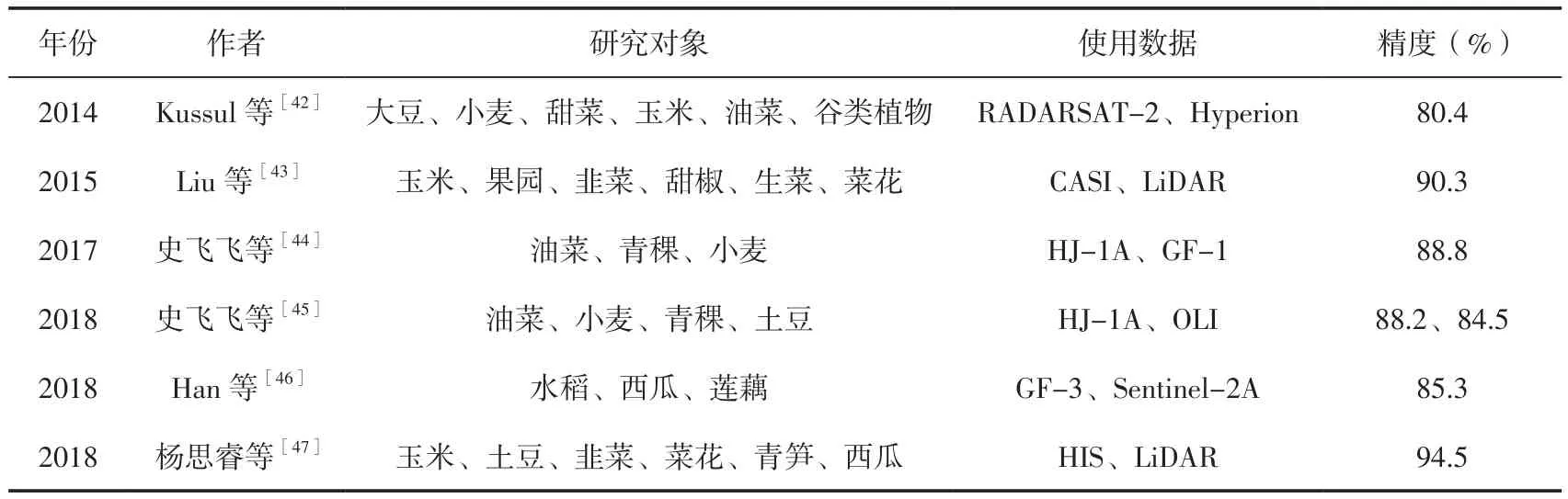
表3 2014—2018年基于多源遥感数据的农作物分类进展Table 3 Advances in crop classification based on multi-source remote sensing data from 2014 to 2018
3 农作物高光谱分类算法
合适的分类方法可以准确地识别农作物。设计合适的高光谱遥感农作物分类方法是国内外学者研究的重点。该文根据采用的分类信息特征将高光谱遥感农作物分类方法分为基于地物光谱信息分类、基于多维特征分类、基于数据降维分类以及多分类器集成分类[48-49]。
3.1 基于地物光谱信息分类
常用的基于统计特征农作物分类方法存在计算量较大的问题,且分类精度有时会受到训练样本数量的影响,因此国内外学者在图像的光谱特征上进行了农作物分类研究,即基于光谱信息分类[50]。基于光谱信息的高光谱遥感农作物分类主要是通过分析农作物间微小的光谱差异,结合适合的光谱匹配技术来实现农作物分类[51]。常用方法有光谱角匹配法、光谱信息散度、计算未知光谱和已知光谱距离并进行最小距离匹配等[52-53]。Rao[54]以高光谱数据在冠层尺度和像素尺度建立的2个光谱库为参考,对印度安得拉邦地区的水稻、甘蔗、辣椒和棉花等作物进行光谱角分类,参考冠层尺度建立光谱库的总体分类精度为86.5%,参考像素尺度建立光谱库的总体分类精度为88.8%。
3.2 基于多维特征分类
基于光谱信息分类没有考虑高光谱数据的空间信息特征,导致分类结果可能出现“椒盐现象”。因此,有学者将空间特征和光谱信息相结合应用于高光谱图像农作物分类中,该方法也是当前高光谱影像农作物分类研究的热点之一[55-57]。如Chen[58]等通过最小噪声分离变换(MNF)提取图像的光谱特征并和提取的空间信息(形态特征、纹理特征等)形成光谱—空间融合特征向量,采用SSF-CRF分类方法对油菜、白菜等农作物进行分类,结果表明,在小样本训练条件下,该方法的分类精度优于传统分类器,且分类精度达到了97.9%。Li[59]等提出了一种基于多特征融合策略的高光谱影像分类方法,在AVIRIS影像中对玉米、大豆等进行了精细分类,该方法首先利用光谱空间特征学习(SSFL)提取光谱空间特征,其次应用局部二进制模式(LBP)提取图像的纹理特征,将纹理特征与光谱空间特征融合,通过基于核极端学习机(KELM)的方法对高光谱图像进行农作物分类,分类精度达到90%以上。
3.3 基于数据降维分类
高光谱影像有几十甚至上百个波段,利用高光谱数据开展农作物分类时,若所有波段均参与分类,会带来计算量过大的问题。基于数据降维农作物分类方法就是先对获取的高光谱影像进行波段选择或特征提取,然后根据一定的规则选择降维后的分量作为分类依据[16,49]。
波段选择是指从原始波段数据中选择出若干个波段,组合成一个新的子集用于分类,其特点是保留了原始波段的物理信息[60]。国内外学者对高光谱影像波段选择方法进行了大量的研究,早期较为成熟的波段选择方法主要有2种:(1)基于信息量的方法,即所选择的波段或波段组合的信息量最大[61],主要包括协方差矩阵特征值法、最佳指数因子法(OIF)、自适应波段选择法(ABS)等,如刘春红[62]等采用ABS方法计算了波段间的指数,根据指数的大小,选择了去掉噪声后180个波段中的50个波段,这50个波段主要集中在“绿峰”、“红谷”、“红边”区域,并分别在原始数据和波段选择后的AVIRIS数据上,对玉米、大豆等农作物进行贝叶斯监督分类,结果表明降维后数据计算量极大地减少了,分类精度比原始数据的分类精度提高了3.7%;(2)基于类间可分性的波段选择方法,即通过计算已知训练样本间的最大统计距离来获得最优波段组合[61],包括离散度、J-M距离、光谱角度、光谱相关系数等。随着波段选择方法的深入研究,张悦[63]等将K-means聚类和ABS方法结合进行高光谱数据波段选择,选取了AVIRIS数据中的18个波段,采用支持向量机对实验区内玉米、草地等进行分类,结果表明,该研究提出的方法分类效果优于ABS方法,分类精度为83.64%。Bajcsy[64]等根据是否需要训练样本将波段选择方法分为监督波段选择和非监督波段选择,非监督波段选择不需要训练样本,只需要根据特定的算法即可获得最优波段组合,监督波段选择方法有基于类间可分性波段选择方法等,非监督波段选择方法包括层次聚类方法、K-means聚类方法等。
特征提取是指依据严格的数学理论,基于变换并按照一定的准则,将高光谱数据由高维空间映射到低维空间的方法[65]。特征提取在一定程度上虽然降低了数据维数,但是同时也改变了原始数据的信息,甚至会导致原始波段信息的丢失[66-67]。经典的特征提取方法有主成分分析[68-69](PCA)、最小噪声分离变换[70]、线性判别分析[71](LDA)等。此外,国内外学者还采用其他高光谱数据特征提取方法开展了农作物分类识别研究。Jia[72]等采用离散小波变换从AVIRIS数据中进行特征提取,应用AP聚类算法从获取的特征中选取最具代表性的特征,再采用最近邻(KNN)分类法对实验区内的小麦、玉米等进行分类,结果表明当特征提取个数为13个时,分类精度最高为89%。夏道平[73]等采用改进分散矩阵特征提取方法,基于支持向量机对实验区内玉米、小麦等进行分类识别,并将该方法和常规特征提取方法的分类效果进行比较,研究表明,采用改进分散矩阵特征提取方法的分类效果最好,分类精度为90.1%。
3.4 多分类器集成分类
高光谱图像存在数据量大、数据维度高的问题,有时采用单一的分类器对高光谱图像进行分类时会受到各种条件的限制,分类精度难以达到满意效果[74]。随着集成学习引入遥感领域,在高光谱图像分类中出现一种新的分类方法即多分类器集成系统,该方法可以将多个单分类器的结果进行综合后得到较满意的分类结果[75]。多分类器集成系统的构成包括系统结构确定、基分类器选择和组合策略选择等3个部分,其中最主要的部分为基分类器的选择[76],共有3种构造方式。第一种基分类器构造方式是基于不同样本的,即在相同的训练集中,采用不同的抽样方法得到输入的训练样本,经典算法有adaboost算法和bagging算法[77]。Kumar[78]等利用adaboost和bagging算法和基于SVM的多分类器模型结合,在AVIRIS高光谱数据上对卷心菜、包菜等进行分类识别,分类精度达到了96.8%。第二种基分类器构造方式是基于不同特征集构造基分类器,该方式表达的是同一训练集的不同特征[49]。Ceamanos[79]等提出了一种基于支持向量机的分类器集合对AVIRIS数据的玉米、大豆、小麦等进行精细分类,该方法首先将波段划分成若干组,对每一组利用SVM进行分类,然后所有的输出采用额外的支持向量机分类器进行最终决策融合,该方法分类精度达到了90.8%。第三种基分类器构造方式是基于不同数量的分类器构造,典型算法有动态分类器选择[80]、基于光谱和空间信息的动态分类器选择[81]等。苏红军[82]等提出一种由支持向量机等5个基分类器构建的多分类器动态集成算法,应用于AVIRIS高光谱影像上对玉米、大豆等农作物进行分类识别,结果表明多分类器动态集成算法可以保持较高的分类精度(优于90%),但是由于该算法主要利用的是邻近像元的空间信息,导致了算法的运行时间较长。表4对高光谱农作物分类方法进行了总结。
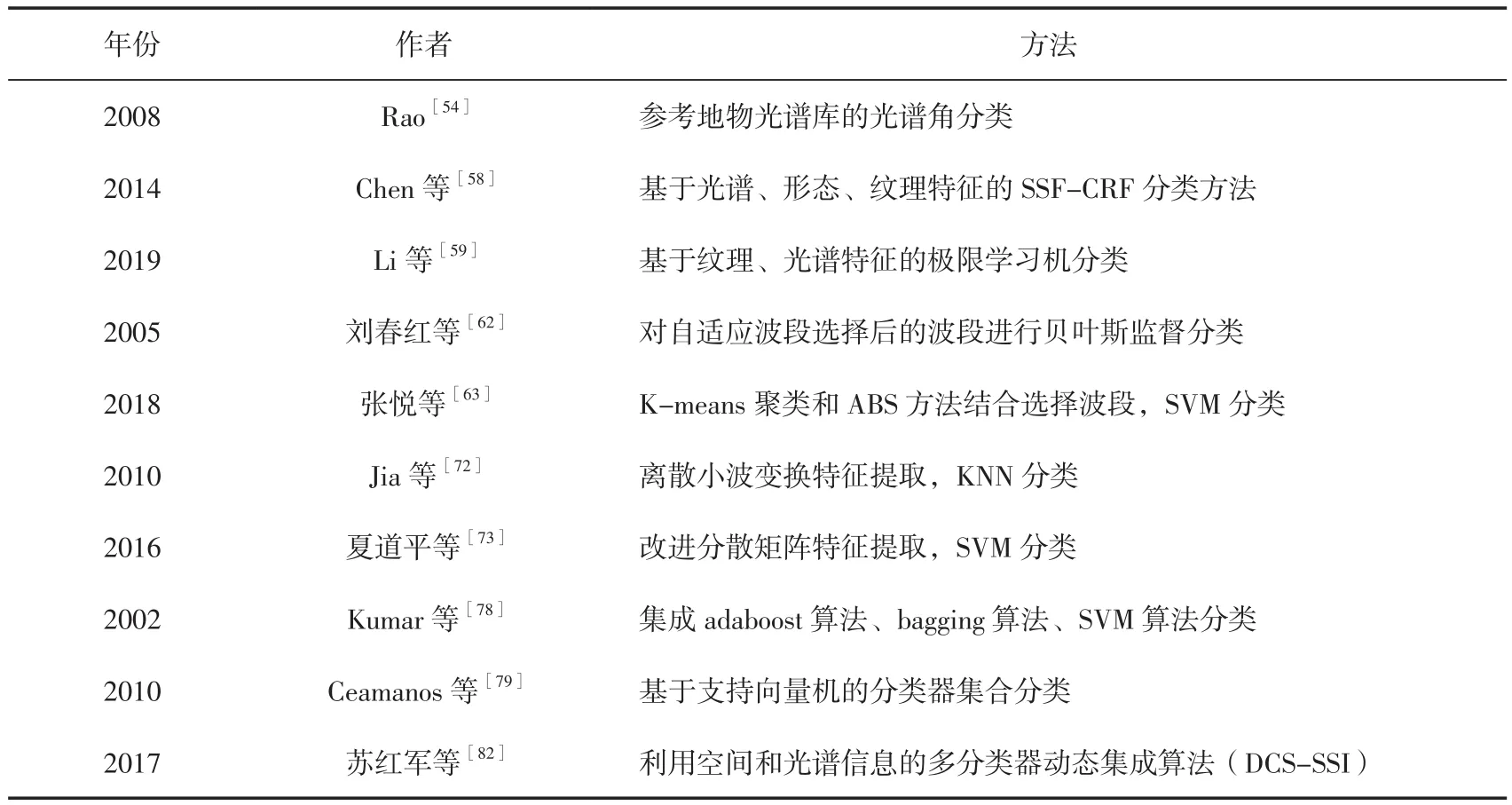
表4 2008—2017年高光谱遥感农作物分类方法进展Table 4 Advances in crop classification by hyperspectral remote sensing from 2008 to 2017
4 结论与展望
农作物高光谱遥感分类研究在数据源的使用方面,由单一的高光谱影像向多源遥感影像发展;研究对象由机载高光谱数据的大豆、玉米等大宗粮食作物到星载高光谱数据中的果园;在高光谱遥感农作物分类算法研究方面,由最初的基于统计特征分类和基于光谱信息分类过渡到基于光谱—空间特征分类和分类器集成系统,高光谱遥感农作物分类已经取得了一定的成果,但仍存在不足,需要进一步研究。
(1)星载高光谱影像数据源较少,而机载高光谱影像的研究范围较小,在进行大面积农作物分类和面积提取方面,数据源受到了限制。
(2)星载高光谱影像光谱分辨率高,可以识别作物间微小的差异,但是空间分辨率较低,在有些实际应用中分类精度较低。因此需要研究将高空间分辨率的多光谱影像与高光谱影像融合,提高高光谱影像的空间分辨率,以便提高高光谱遥感农作物分类精度。
(3)高光谱数据具有维数高、数据冗余量大、波段间相关性强、数据处理工作量大等问题,找到一种能够加快高光谱数据处理速度的降维方法和分类器,以提高高光谱数据处理速度和分类精度,是今后高光谱数据的研究重点之一。
(4)扩大高光谱遥感农作物监测对象的范围,提高星载高光谱影像的空间分辨率,提高分类器的普适性和稳定性,进一步研究高光谱农作物分类识别的机理和多源数据融合方法。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
航天返回与遥感(2022年2期)2022-05-12
空间科学学报(2021年1期)2021-05-22
计算机系统应用(2021年2期)2021-02-23
电子技术与软件工程(2019年18期)2019-11-18
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电子技术与软件工程(2017年14期)2017-09-08
电子制作(2017年8期)2017-06-05
航天返回与遥感(2014年5期)2014-07-31