
面向海量遥感数据的存储设备架构研究
2019-12-10 09:33乐海军
科技创新导报 2019年21期
乐海军
摘 要:首先分析遥感在地物目标三维图像层次上的多样化需求,以及传统计算机体系结构在处理海量数据所遇到的内存传输带宽瓶颈、计算功耗高问题;接着提出一种计算存储融合的多模遥感设备实施方案,并从软件无线电与多模终端、异构计算与硬件加速、计算存储融合与智能固态硬盘三个方面展开系统架构设计,涉及接口描述、算法理论、设计思想与产业现状等若干方面。提出的系统架构设计在特性上支持系统工作于多种物理模式,支持系统的低功耗、高计算效率性能需求,支持系统利用机器视觉、深度学习实现数据的模式识别、特征提取处理,支持高带宽存储需求以及实现存储上的计算。
关键词:遥感 软件无线电 多模终端 异构计算 计算存储融合 智能固态硬盘
中图分类号:TN952 文献标识码:A 文章编号:1674-098X(2019)07(c)-0105-02
微波遥感系统应用以高性能计算与大容量存储为基础,对计算与存储有很高的要求:野外搜救,要求实时分析、完成目标检测,把握最佳救援时间挽救生命;军事领域,侦察战场可疑情况并实时作出判断,是把握战情、先发制人的关键;防灾减灾,要求在灾害性天气下,提供实时、连续的数据。这些任务的完成涉及高性能实时计算和海量数据处理,以及有可能需要将数据保存下来,满足后续分析处理需求。
本文分析遥感系统可能存在的多种应用需求,对系统工作参数的要求,海量数据处理与存储所带来的设计挑战,以及在充分分析基础上,设计一种解决问题且行之有效的系统架构。
1 设计挑战
1.1 需求多样化
星载雷达一旦升空,软硬件系统固化,功能用途很难再改变。但是一些机载、车载雷达系统,其功能用途可能发生改变,呈现多样化需求。机载雷达,它可用于执行搜救任务,查找地面搜救目标信息,要求穿透植被覆盖看到地表;也可用于执行遥感监测任务,监测农作物长势情况、植被覆盖情况;还可用于病虫害监测与防治。现今的雷达系统设计,大都功能用途单一,不能满足多样化应用需求。这既导致设备的研发成本很高,也不利于相关社会经济活动的开展。
多样化应用需求对雷达系统设计提出了挑战。如果能改变单部雷达系统功能用途单一的局面,构建一种通用的硬件平台,通过软件控制雷达系统的测量模式、工作频段等,就有可能实现一部雷达系统满足多种社会经济活动的需求,无疑具有较大的价值。
1.2 I/O瓶颈
机载遥感系统,除了配备合成孔径雷达,还可能配备高清光学相机。采集的数据有可能需要实时处理,比如野外搜救、军事侦察;也有可能存储以便回到地面进行分析处理,比如陆地与海洋的环境资源监测。雷达以及高清光学相机在工作过程产生大量数据,以500MHz P波段的合成孔径雷达为例,射频直采,10倍过采样,采样精度12bits,每秒产生7.5GB数据量。高清光学相机的传感器像素通常达到亿级,图片数据容量更为庞大。如何处理和存储这些数据对系统设计是个挑战。
1.3 功耗
海量数据处理过程涉及到的计算和数据搬移必然带来大量的能量消耗。这种能量消耗来源可以归结为两个因素:一是计算方式,二是体系结构。
传统的计算机体系结构是冯·诺依曼架构,计算与存储分离。计算过程要将数据从外存搬到内存,再搬到缓存。这种架构所带来的问题是计算过程数据在存储器和处理器之间搬动,消耗了大量的能量。据研究,冯·诺依曼架构数据搬动的功耗约占全部计算过程功耗的50%以上。各国科学家一直在努力寻找降低计算功耗的办法。一些可行的技术方案包括,让存储器更靠近计算器,减少数据行进的距离,比如用大容量非易失存储介质替代RAM;让计算更靠近存储,实现存储上的计算;让高性能存储器向三维扩展而不是朝二维延伸;超算与闪存结合;3D异构堆叠;异构计算等。
2 系统架构
针对遥感系统设计遇到的功能多样化需求,计算效率与实时性约束,以及海量数据处理所带来的功耗问题,需要设计一种系统架构,应对和处理这些挑战。为处理这些挑战而设计的一种实施方案,它包括以下6个模组。
(1)微波遥感模拟前端;
(2)光学遥感相机/传感器;
(3)高速数字信号处理;
(4)基带数据通过PCIe接口传至上位机,完成软件处理和显示;
(5)经过增强处理的图像数据进入机器视觉/深度学习模组,完成图像的识别与分类;
(6)为了便于机载设备回到地面后继续分析与处理相关数据,微波遥感基带数据以及完成图像识别与分类的图像数据保存至固态硬盘。
2.1 异构计算与硬件加速
CPU/GPU属于冯·诺依曼体系结构,指令译码执行、共享内存,而FPGA属于非指令系统,具有非冯结构。FPGA的每个逻辑单元功能在重编程时已确定,不需要指令,不需要仲裁和缓存。FPGA同时拥有流水线并行和数据并行,处理FFT/AES/ FIR這类计算,具有先天优势。异构计算在大数据处理领域也有重要应用。卷积神经网络这类的深度学习技术,需要处理海量的数据,属于I/O通信带宽敏感型计算任务。在计算过程应当考虑数据的就近处理,避免数据的搬动。
基于这样的分析,设计异构计算系统,采用FPGA Ultrascale + Zynq架构。经过中频处理的微波遥感基带数据通过PCIe传至上位机软件,完成动目标显示等功能;为了后续分析处理需要,经过中频处理后的微波遥感基带数据同时通过SRIO进入Zynq后存入DDR,再从DDR通过PCIe接口存入固态硬盘。经过FPGA Ultrascale图像增强处理后的光学遥感数据通过SRIO进入Zynq,由卷积神经网络完成图像数据的识别和分类,上传至上位机软件,完成图像显示等功能,同时这些数据存入固态硬盘供后续分析处理。Zynq上的ARM完成一些图像处理的软件功能,用户也可以基于此做一些定制化操作。
2.2 计算存储融合与智能固態硬盘
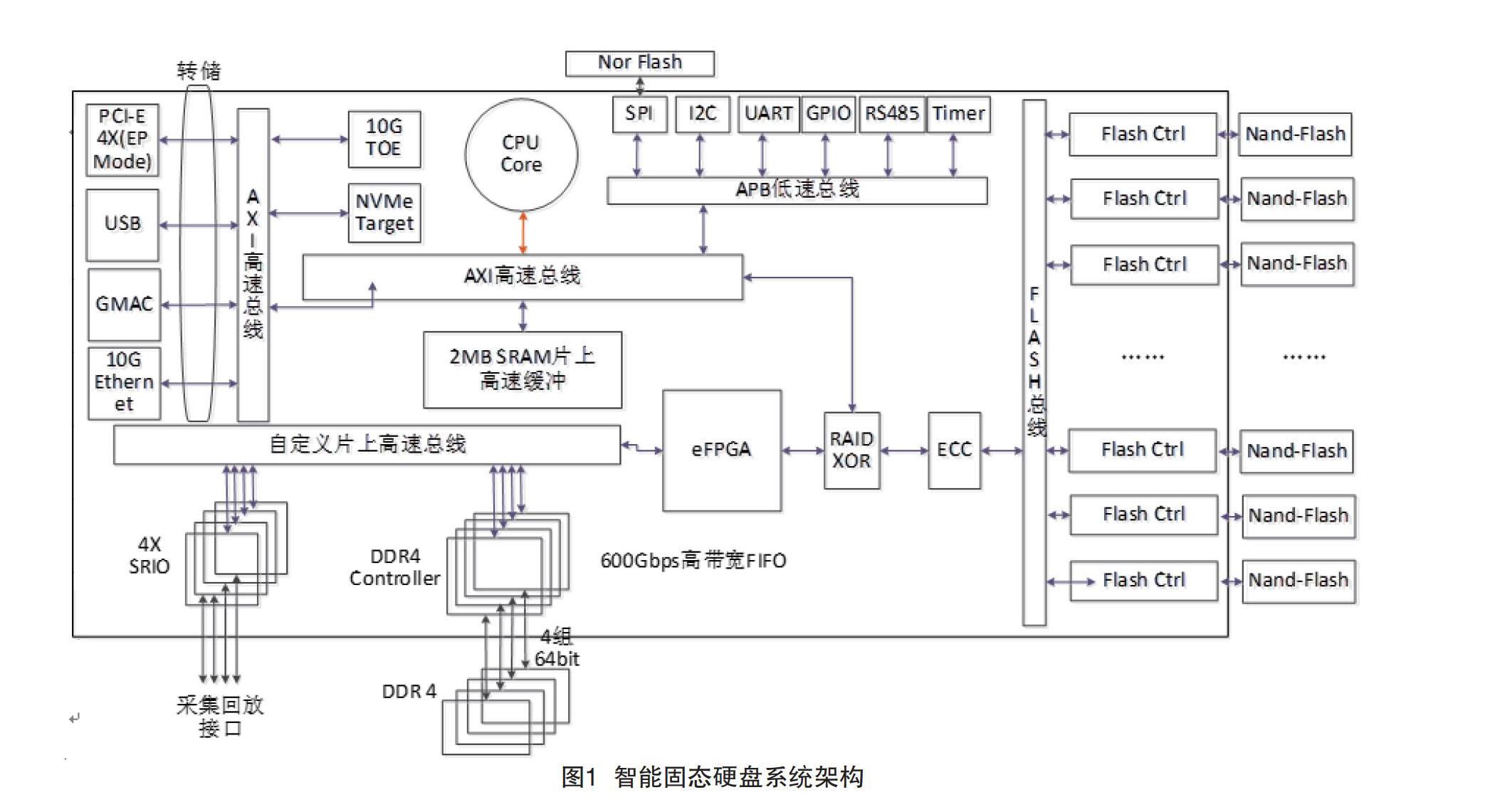
综合考虑计算存储融合和可重构计算需求,设计如图1所示的智能固态硬盘系统架构。
芯片的工作原理是:记录模式下,通过4路4X SRIO接口获取遥感数据,数据暂存在DDR FIFO;通过NAND Flash控制器将数据存储在Flash介质中;回放模式下,通过NAND Flash控制器将上位机指定的文件读出,进行ECC检错纠错、RAID重建,暂存于DDR FIFO中,通过4路4X SRIO接口回送给系统;转储模式下,读出的数据经AMBA片上高速总线通过高速接口输出,常用的高速接口有PCIe NVMe,USB3.0和GbE/XGbE。
芯片集成ARM Cortex A7单处理器核心,运行频率800MHz;处理器核心上运行遥感信息记录存储管理专用固件以及标准文件系统ExFAT。集成2MB的片内高速SRAM存储,作为ARM Cortex A7单处理器核心的工作内存。集成4路4X SRIO 4.0接口,可支持峰值带宽最高为400Gbps信号的输入。集成4组64位DDR4-2400存储控制器,峰值带宽为600Gbps,可支持的最大存储容量为512GB。集成eFPGA IP,支持可重构的异构计算硬件加速。
3 结语
考察遥感成像的多层次需求以及现代计算机体系结构在处理海量数据时面临计算存储分离带来的I/O瓶颈问题和功耗高问题,本文提出了一种集数据采集、处理与存储的一体化解决方案。通过软件无线电技术以及系统架构和算法设计,实现一个系统对P、L、S、C和X多个波段的支持。通过异构计算系统架构,实现海量数据的低功耗处理、低时延处理。通过存储上的计算和智能固态硬盘设计,实现高带宽数据的存储、回放与转储,以及计算就近存储处理带来的硬件加速,进一步实现系统低功耗设计。本文提出的多模终端计算存储融合遥感设备架构,采用前沿的设计理念,能提高雷达系统的生命力和创造价值的能力。
参考文献
[1] 郑鸿瑞,徐志刚,甘乐,等. 合成孔径雷达遥感地质应用综述[J].国土资源遥感,2018,30(2):12-20.
[2] 宗体,齐真.空间技术新跨越“遥感”地球添“神探”——访高分-3卫星总指挥兼总设计师张庆君[J]. 国际太空,2016(453):27-32.
[3] WANG C C,YUAN F L, MARKOVIC D, A Multi-Granularity FPGA With Hierarchical Interconnects for Efficient and Flexible Mobile Computing[J], IEEE Journal of Solid-State Circuits , 2014 , 50 (1) :137-149.
