果园喷药竞赛机器人设计
2019-12-05 02:48高研李昕宇史颖刚刘利
无线互联科技 2019年16期
高研 李昕宇 史颖刚 刘利

摘 要:文章设计了一种面向中国机器人大赛的果园喷药机器人,根据竞赛要求,结合平面四杆机构的工作原理,设计了机器人的机械系统;以STM32F103ZET6单片机为控制核心,通过搭载电机驱动器、循迹传感器、平面定位系统以及喷药系统,设计了竞赛机器人的控制系统,其中,以步进电机控制器、丝杠滑台、电磁继电器、电磁阀、增压泵等构建了机器人喷药系统。最后,设计了控制算法,实现了果园喷药机器人的竞赛功能。
关键词:机器人竞赛;果园喷药;自主寻迹;平面定位系统;单片机控制
1 果园喷药机器人竞赛相关简介
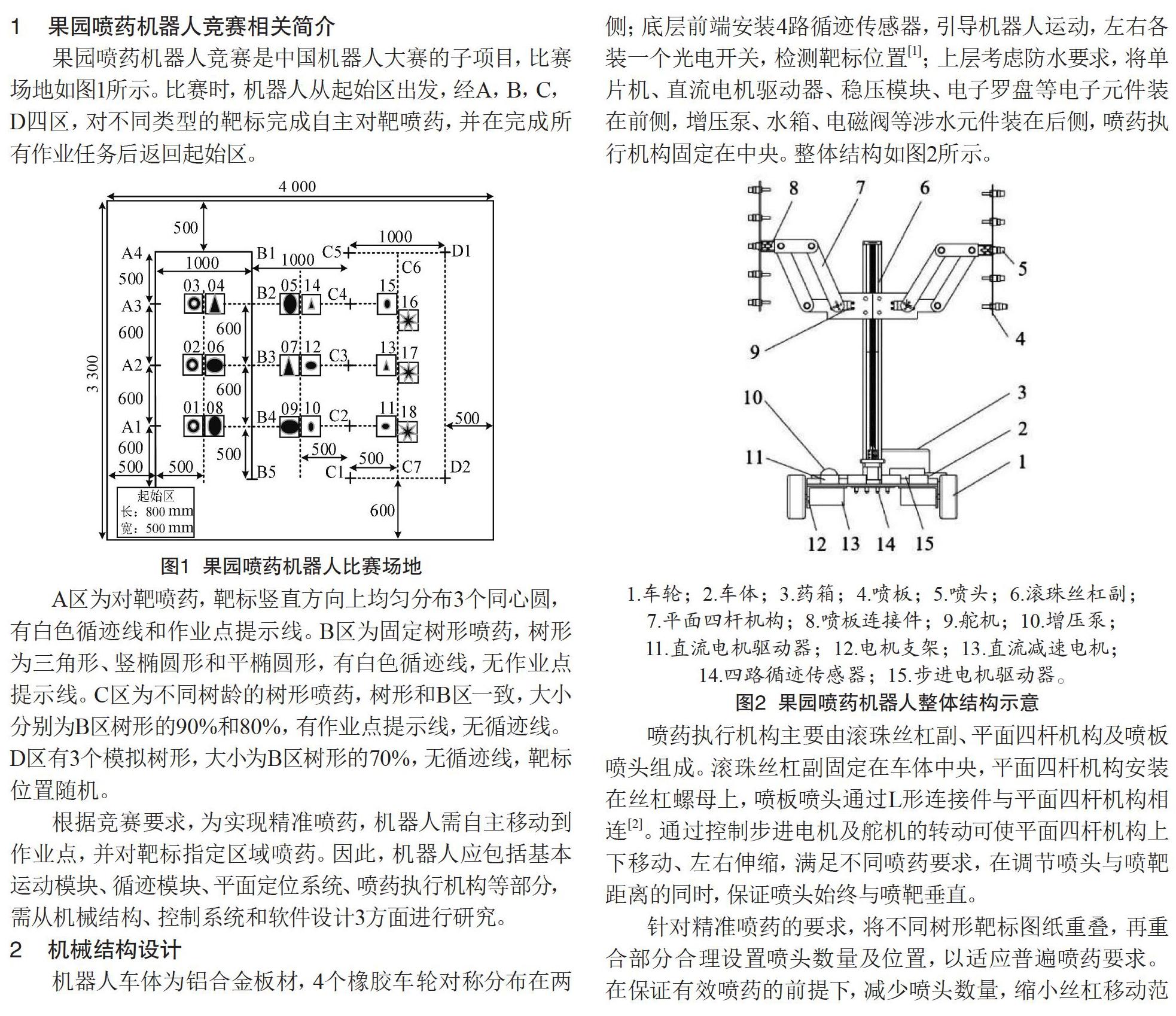
果园喷药机器人竞赛是中国机器人大赛的子项目,比赛场地如图1所示。比赛时,机器人从起始区出发,经A,B,C,D四区,对不同类型的靶标完成自主对靶喷药,并在完成所有作业任务后返回起始区。
A区为对靶喷药,靶标竖直方向上均匀分布3个同心圆,有白色循迹线和作业点提示线。B区为固定树形喷药,树形为三角形、竖椭圆形和平椭圆形,有白色循迹线,无作业点提示线。C区为不同树龄的树形喷药,树形和B区一致,大小分别为B区树形的90%和80%,有作业点提示线,无循迹线。D区有3个模拟树形,大小为B区树形的70%,无循迹线,靶标位置随机。
根据竞赛要求,为实现精准喷药,机器人需自主移动到作业点,并对靶标指定区域喷药。因此,机器人應包括基本运动模块、循迹模块、平面定位系统、喷药执行机构等部分,需从机械结构、控制系统和软件设计3方面进行研究。
2 机械结构设计
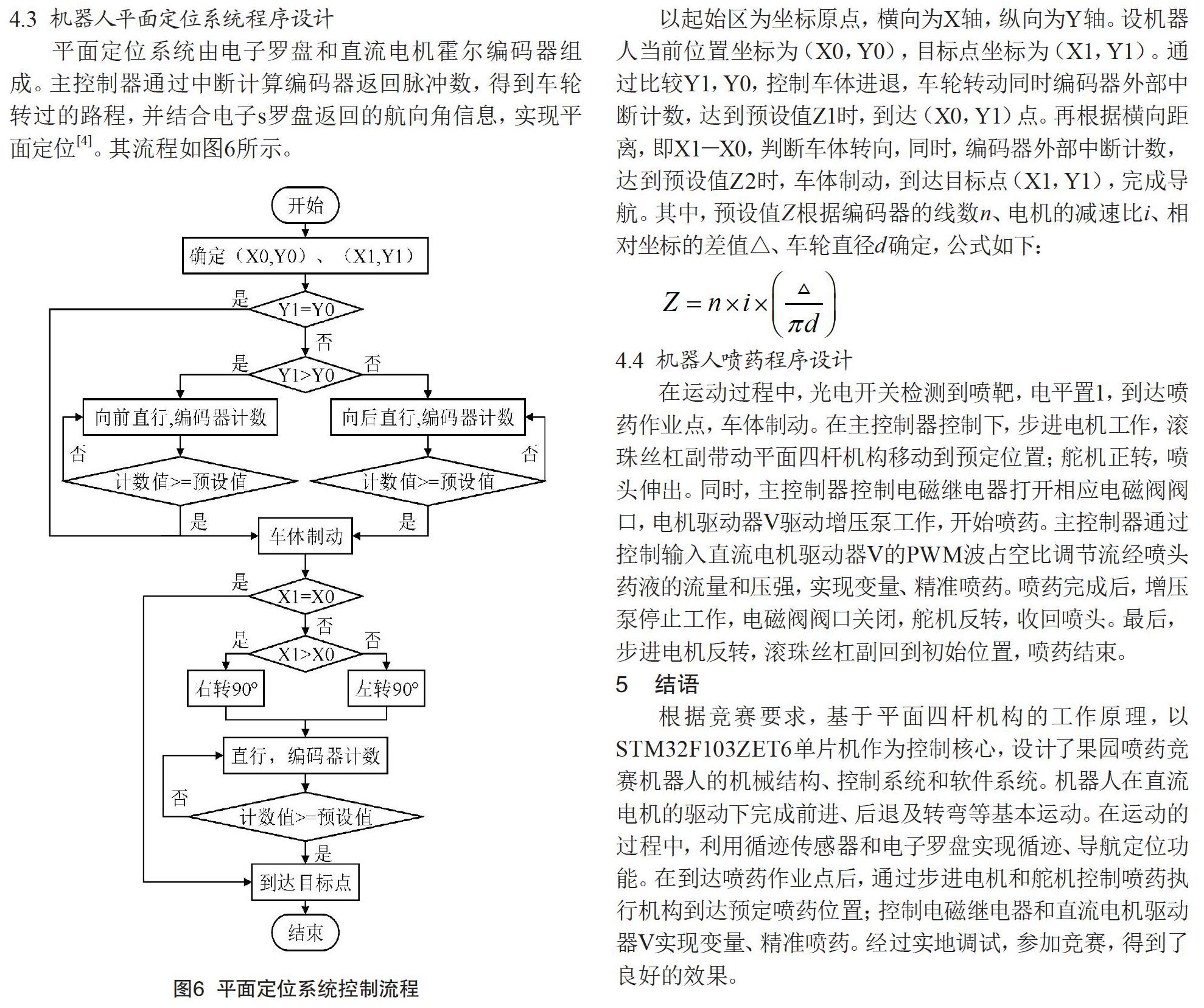
机器人车体为铝合金板材,4个橡胶车轮对称分布在两侧;底层前端安装4路循迹传感器,引导机器人运动,左右各装一个光电开关,检测靶标位置[1];上层考虑防水要求,将单片机、直流电机驱动器、稳压模块、电子罗盘等电子元件装在前侧,增压泵、水箱、电磁阀等涉水元件装在后侧,喷药执行机构固定在中央。整体结构如图2所示。
喷药执行机构主要由滚珠丝杠副、平面四杆机构及喷板喷头组成。滚珠丝杠副固定在车体中央,平面四杆机构安装在丝杠螺母上,喷板喷头通过L形连接件与平面四杆机构相连[2]。通过控制步进电机及舵机的转动可使平面四杆机构上下移动、左右伸缩,满足不同喷药要求,在调节喷头与喷靶距离的同时,保证喷头始终与喷靶垂直。
针对精准喷药的要求,将不同树形靶标图纸重叠,再重合部分合理设置喷头数量及位置,以适应普遍喷药要求。在保证有效喷药的前提下,减少喷头数量,缩小丝杠移动范围。以B区靶标为例,其喷头作业效果如图3所示。图4为喷药机器人实物。
3 控制系统设计
果园喷药竞赛机器人以STM32F103ZET6单片机为主控制核心,控制系统架构如图5所示。
机器人工作时,主控制器通过向直流电机驱动器发送可调脉冲宽度调制(Pulse Width Modulation,PWM)波,驱动电机转动,控制电机转速;通过控制各直流电机驱动器转向逻辑电平,调节电机转向,实现机器人进退、转向等基本运动。比赛过程中,有循迹线时,通过4路循迹传感器输出逻辑电平的变化,引导机器人循线运动。无循迹线时,由电子罗盘MPU9250和直流电机上搭载的霍尔编码器实时传输机器人的姿态、速度和位移信息,引导机器人到达指定位置。根据光电开关电平变化,判断机器人是否到达喷药作业点[3]。
到达靶标位置后,主控制器根据预定的作业位置,驱动喷药平台移动,并进行药液喷射。主控制器通过步进电器驱动器控制步进电机转动,带动丝杠螺母升降,以调整喷药机构高度;通过控制舵机转动,实现喷头伸缩,以贴近喷药位置;到达目标位置后,主控制器通过直流电机驱动器V调节增压泵压力和流量,并通过电磁继电器控制相应电磁阀阀口的开闭,实现多喷头独立控制,完成对靶标指定区域的精准喷药。
在整个过程中,语音模块实时播报作业任务完成情况。
4 软件系统设计
4.1 机器人基本运动程序设计
机器人采用4轮独立驱动、差速控制,通过控制各直流电机的运转状态,实现车体的基本运动。在运动过程中,为减少车体重心偏移及摩擦力不同引起的速度误差,保证机器人沿直线快速稳定运动,采用比例—积分—微分(Proportion-Integral-Differential,PID)控制算法调节车轮转速。其基本原理为:由主控制器设定各车轮的给定转速,并对霍尔编码器返回脉冲进行定时采样,利用采样接收结果计算各车轮的实际转速,并以此作为反馈信号进行偏差调节。
PID控制算法的数学模型如下:
OUT=KP×EK+KI+SK+KD×KD×DK+OUT0
其中,KP,KI,KD分别为比例常数、积分常数、微分常数,EK表示第K次编码器测量的实际速度与给定速度偏差,SK表示前K次速度偏差代数和,DK表示最近两次速度偏差之差。
EK,SK,DK的数学模型如下:
公式中,SV,PV分别为通过控制程序设定的给定转速和编码器测得的实际转速。
在果园喷药竞赛机器人的实际应用中,设定KP值为60,KI值为0.5,KD值为0,可实现机器人车轮速度的PID控制,使机器人沿直线稳定运动。
4.2 机器人循迹控制程序设计
果园喷药竞赛机器人车体前端装有4路循迹传感器SEN-1595,从左至右依次为L2,L1,R1,R2。
循迹传感器初始电平信号为1,检测到循迹线时为0。若车体向右偏转,L1路检测到循迹线,电平置0,主控制器分别调节两侧PWM波占空比,使左侧两轮速度小于右侧两轮速度,车体向左校正。若到达左转位置,L2路检测到循迹线,电平置0,主控制器控制车体左侧两电机同速反转,右侧两电机同速正转,车体左转;反之亦然。
4.3 机器人平面定位系统程序设计
平面定位系统由电子罗盘和直流电机霍尔编码器组成。主控制器通过中断计算编码器返回脉冲数,得到车轮转过的路程,并结合电子s罗盘返回的航向角信息,实现平面定位[4]。其流程如图6所示。
以起始区为坐标原点,横向为X轴,纵向为Y轴。设机器人当前位置坐标为(X0,Y0),目标点坐标为(X1,Y1)。通过比较Y1,Y0,控制车体进退,车轮转动同时编码器外部中断计数,达到预设值Z1时,到达(X0,Y1)点。再根据横向距离,即X1-X0,判断车体转向,同时,编码器外部中断计数,达到预设值Z2时,车体制动,到达目标点(X1,Y1),完成导航。其中,预设值Z根据编码器的线数n、电机的减速比i、相对坐标的差值△、车轮直径d确定,公式如下:
4.4 机器人喷药程序设计
在运动过程中,光电开关检测到喷靶,电平置1,到达喷药作业点,车体制动。在主控制器控制下,步进电机工作,滚珠丝杠副带动平面四杆机构移动到预定位置;舵机正转,喷头伸出。同时,主控制器控制电磁继电器打开相应电磁阀阀口,电机驱动器V驱动增压泵工作,开始喷药。主控制器通过控制输入直流电机驱动器V的PWM波占空比调节流经喷头药液的流量和压强,实现变量、精准喷药。喷药完成后,增压泵停止工作,电磁阀阀口关闭,舵机反转,收回喷头。最后,步进电机反转,滚珠丝杠副回到初始位置,喷药结束。
5 结语
根据竞赛要求,基于平面四杆机构的工作原理,以STM32F103ZET6單片机作为控制核心,设计了果园喷药竞赛机器人的机械结构、控制系统和软件系统。机器人在直流电机的驱动下完成前进、后退及转弯等基本运动。在运动的过程中,利用循迹传感器和电子罗盘实现循迹、导航定位功能。在到达喷药作业点后,通过步进电机和舵机控制喷药执行机构到达预定喷药位置;控制电磁继电器和直流电机驱动器V实现变量、精准喷药。经过实地调试,参加竞赛,得到了良好的效果。
[参考文献]
[1]孙雪,姚名晖,宋朋.果园喷药机器人的创新设计[J].安徽农业科学,2013(30):12204-12206.
[2]李锟,王洪臣,郑晓培,等.微型喷药机构型设计与仿真分析[J].农机化研究,2017(8):72-76.
[3]刘涛,吕勇,刘立双.智能车路径识别与控制性能提高方法研究及实现[J].电子技术应用,2016(1):54-57.
[4]曹慧芳,吕洪波,孙启国.基于MEMS陀螺仪的随机误差分析[J].计算机测量与控制,2016(1):178-181.