城市轨道交通全自动无人驾驶系统与传统CBTC系统差异分析与探讨
2019-12-03 08:59王向阳朵建华高晓菲
铁路技术创新 2019年5期
王向阳,朵建华,高晓菲
(1. 宁波市轨道交通集团有限公司 运营分公司,浙江 宁波 315500;2. 浙江众合科技股份有限公司,浙江 杭州 310051)
1 全自动无人驾驶系统发展现状
近年来,城市轨道交通全自动无人驾驶线路呈现加速增长的态势,截至2018年12月,全世界共有64条全自动无人驾驶地铁线路投入运营,为42个城市提供1 026 km的公共交通服务。据国际公共交通协会估计,到2020年国际上75%新线将采用全自动无人驾驶技术,40%的既有线改造时将采用全自动无人驾驶技术[1-2]。
根据我国各城市轨道交通建设规划,北京地铁3号线、12号线、17号线、19号线以及新机场线等新一轮轨道交通线路,以及上海地铁浦江线和未来几条新线,均为全自动无人驾驶运营等级。深圳、成都、武汉、苏州等城市,在建及规划中的地铁线路也逐步开始采用全自动无人驾驶运营等级的系统。全自动无人驾驶系统正在被越来越多地了解和接受,同时经过近年来我国城市轨道交通技术的发展,全自动无人驾驶技术也正逐步走向成熟。在此,重点对全自动无人驾驶系统与传统基于通信的列车控制系统(CBTC)在系统组成、主要功能点及应用场景等方面的差异进行分析,总结全自动无人驾驶技术的优势和主要功能特点,提出针对全自动无人驾驶系统主要功能点的设计思路以及系统实现的相关建议。
2 系统组成差异分析
全自动无人驾驶系统与传统CBTC系统的系统组成按照设备所属的区域划分,主要包括车载设备和轨旁设备两大部分,其中轨旁设备包括车站设备、车辆段设备、控制中心设备。
2.1 车载设备
全自动无人驾驶系统的车载设备与传统CBTC系统相比,车载列车自动防护系统(车载ATP)、速度传感器、应答器读取单元、驾驶台等几乎没有变化,保留了传统CBTC系统的既有配置和功能。车载设备主要增加了与障碍物检测装置的接口以及唤醒休眠模块,增强了车头以及车厢范围内的列车视频监控系统(CCTV)和综合监控设备,并对信号系统和车辆间的接口进行了升级改造。
(1)与障碍物检测装置接口。由于没有司机在车头位置瞭望,全自动无人驾驶系统需要增加障碍物自动检测功能。其中一种是对障碍物的识别和预检测,该技术还未在实际工程项目中推广使用;另一种是当列车与障碍物发生碰撞时,障碍物检测装置向车载ATP汇报碰撞事故的发生,当车载ATP检测到障碍物信息后将采取紧急制动等防护措施,以避免二次事故伤害。
(2)唤醒休眠模块。唤醒休眠模块通过车辆蓄电池供电方式在列车休眠期间保持在线,并在设定时刻可接收来自中心列车自动监控系统(ATS)的休眠/唤醒指令,启动列车休眠/唤醒程序[3-7]。
(3)车载CCTV和综合监控设备。全自动无人驾驶系统因为没有司机监督车上以及车前的状态,需要在车头和车厢内增加CCTV以及其他辅助的综合监控设备,以加强对列车运行过程的监控和应急事件的处理。CCTV采集到视频信息后提供给控制中心,控制中心可据此来实现远程监督控制和驾驶功能[8-11]。
(4)与车辆的接口。在全自动无人驾驶系统中,增强了信号系统和车辆间的接口。增加的主要信息包括:信号系统给车辆的唤醒休眠指令、全自动驾驶模式指令、跳跃调整指令、鸣笛指令、运行工况、屏蔽门故障等;车辆给信号系统的休眠唤醒状态、车辆自检状态、车辆状态、列车管理系统(TMS)故障状态、车辆火灾报警等。
2.2 轨旁设备
(1)车站设备。全自动无人驾驶系统的车站轨旁设备与传统CBTC系统相比变化较少,如车站联锁设备、区域控制器(ZC)、ATS、信号机、计轴器、应答器等几乎没有变化。主要增加了站台关门按钮、工作人员保护开关(SPKS),并对屏蔽门进行升级改造,增加了车门和屏蔽门的防夹功能以及故障车门/屏蔽门的对位隔离功能。
(2)车辆段设备。在全自动无人驾驶系统中,全自动车辆段是系统实现的关键部分。通过划分全自动运行区域与非全自动运行区域等措施,实现全自动车辆段的功能需求。全自动无人驾驶系统的车辆段设备与传统CBTC系统相比,车辆段的联锁设备、信号机、转辙机等几乎没有变化,主要在全自动运行区域新增ZC设备、车地无线覆盖,以及在停车列检库内增加了应答器等辅助定位设备,用于列车休眠前的精确停车以及列车唤醒后的快速定位[6]。
(3)控制中心设备。控制中心设备主要由ATS子系统设备组成,相比于传统CBTC系统,全自动无人驾驶系统的中心ATS功能有部分改变,并增加了乘客调和车辆调功能,增强了与综合监控系统(ISCS)间的接口。中心ATS功能主要增加了列车休眠唤醒功能、自动出入段功能、远程控制功能等。由于全自动无人驾驶系统列车上无需配备司机,由控制中心对线路中运行车辆状况、乘客状况进行调度和管理,以加强对列车运行过程的监控和应急事件的处理,因此控制中心新增加车辆调,实现车辆的远程控制,必要时采取紧急制动;新增加乘客调,用于随时响应车厢内乘客的呼叫服务。另外,增强了与ISCS间的接口,包括与广播系统(BA)、电力监控系统(SCADA)、火警系统(FAS)、环境设备监控系统(BAS)、CCTV、站台乘客信息系统(站台PIS)、无线列调系统(TETRA)、控制中心大屏等系统间的互联,通过互联实现对综合监控相关设备的联动监督以及防护控制[7-9]。
3 应用场景差异
全自动无人驾驶系统与传统CBTC系统应用场景差异见图1。
4 功能差异
全自动无人驾驶系统与传统CBTC系统功能差异见图2。
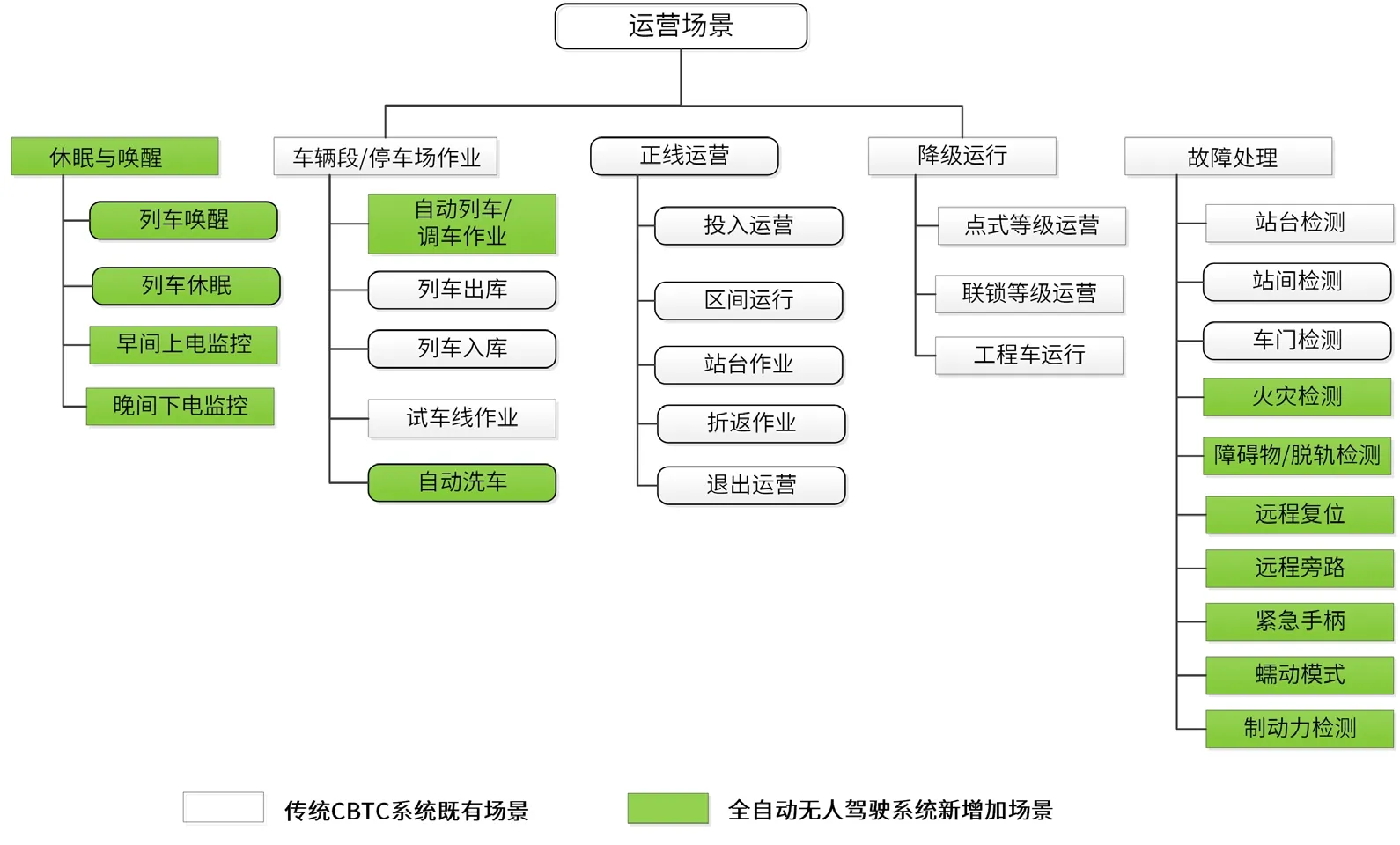
图1 应用场景差异示意图
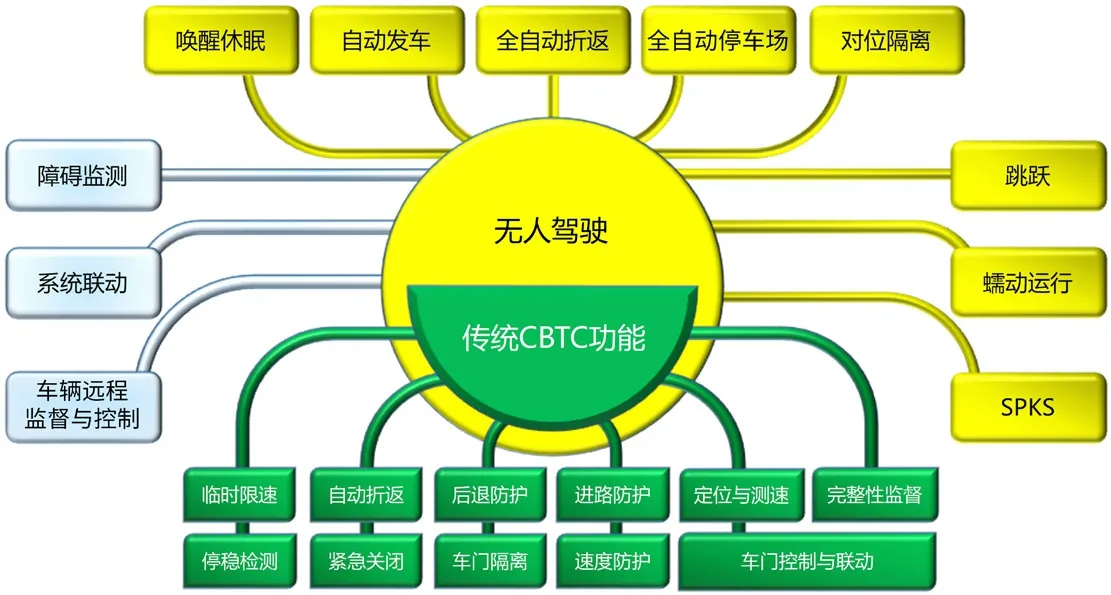
图2 功能差异示意图
(1)列车唤醒。中心ATS根据列车时刻表,自动给休眠的列车发送唤醒指令。列车接收到唤醒指令后,将执行车载各子系统的启动和自检。待所有唤醒程序结束,车载子系统向中心ATS报告列车状态、列车的唤醒过程及唤醒情况,如果唤醒不成功,中心调度员将根据其故障信息进行人工干预;如果唤醒成功,则列车可以根据运营计划投入运营[7-9]。
(2)列车休眠。列车当天运营结束驶入车辆段/停车场库线或正线存车线并停稳后,为了节省能源和保护设备,中心ATS根据列车时刻表,自动发送休眠指令给列车。列车接收到休眠指令后,自动启动休眠程序。在列车完全休眠前,车载子系统向中心ATS报告列车的休眠过程及休眠情况,如果休眠成功,则整车进入休眠状态,仅保持唤醒休眠模块和车地通信设备在不断电状态;如果休眠不成功,中心调度员将根据其故障信息进行人工干预。
(3)自动发车。当停站倒计时结束后,列车在检测到车门、站台门关闭且锁闭,发车条件满足要求后自动发车前往下一站,无需司机参与按压发车按钮或其他发车操作。
(4)全自动折返。当列车运行到折返站台,根据运行计划及移动授权驶入相应的折返点,当折返进路授权后,列车将自动切换运行方向发车运行至折返后的站台,自动打开车门和屏蔽门,无需司机参与折返换端等其他任何操作。
(5)全自动停车场(自动进出车辆段/停车场)。全自动停车场作为正线的延伸,实现正线的列车自动防护功能。
(6)自动出车辆段/停车场。车辆段/停车场进路命令由ATS自动生成,调度人员通过车辆段/停车场ATS工作站,建立列车与时刻表的对应关系,并根据时刻表适时触发对应的出场/段进路,自动投入正线运营。
(7)自动进车辆段/停车场。ATS根据列车计划,为停止正线服务的每一列车自动确定列车的存放线路,并根据列车号自动触发回库进路,列车直接运行到指定的库线/存车线停车。
(8)全自动停车场(自动调车)。车辆段/停车场内自动调车通过列车进路方式实现。车辆段/停车场内进路由ATS自动触发,ATS具有车辆段/停车场调车作业计划编辑功能,车辆段/停车场调度为列车确定目的地(如转换轨、洗车线或其他存车线),ATS自动选择折返点及进路信息[7-9]。
(9)全自动停车场(自动洗车)。洗车作业前,通过调车作业计划,先将列车调至洗车线,信号系统通过与洗车机接口,和车辆配合实现全自动洗车功能。全自动洗车过程中,车辆根据信号系统发送的洗车工况,控制列车恒速(如3~5 km/h)运行。
(10)车门/屏蔽门故障对位隔离。当个别屏蔽门出现故障,屏蔽门向信号系统报告故障屏蔽门位置(包括站台号或门编号等),在列车到达站台前,信号系统将故障屏蔽门位置发送给列车,列车将自动对对应车门进行电气隔离,使此车门在列车停靠该站时不参与开关门动作。当个别列车车门故障时,列车将故障车门关闭且锁闭,并自动对故障车门进行电气隔离,车辆向信号系统报告故障车门位置,信号系统将故障车门信息发送给屏蔽门,由屏蔽门控制系统控制故障车门对应的屏蔽门在列车停靠该站时不参与开关门动作[10]。车门/屏蔽门故障对位隔离示意见图3。
(11)跳跃自动对位调整。当列车进站、驶入存车线/库线未停在规定的停车窗内时,信号系统将自动进行站停位置调整。列车以全自动无人驾驶模式进站停车,如果自动停在停车窗内,车载子系统会向ATS汇报停稳信息并自动进行开关车门/屏蔽门控制;如果列车以全自动无人驾驶模式进站欠标或过标在可调整范围内时,车载子系统将向ATS进行报警,并自动控制列车以跳跃方式向前或向后进行调整对标;如果列车以全自动无人驾驶模式进站欠标超过可调整范围时,车载子系统将向ATS进行报警,并继续自动控制列车对位停车[7-10]。
(12)蠕动模式运行。蠕动模式为全自动驾驶条件下,当车辆网络大面积故障或车载子系统与车辆之间通信故障时,在列车零速时由车载子系统向中心ATS申请,并由中心人工确认后才允许列车进入限速运行(25 km/h)的一种模式。列车以蠕动模式进站停车后,打开车门不关闭,施加制动防止列车移动,并禁止列车继续运行到下一站,等待站务综合人员上车处理[10]。
(13)SPKS防护。SPKS为工作人员保护开关,用于作业人员需要进入全自动运行区域时(如下轨或上车等)的一种安全保护开关。当SPKS处于防护位时,信号系统控制SPKS开关防护区域内的信号机以及可以驶入该防护区域的进路始端信号机立即关闭,列车切除牵引施加紧急制动停车,信号系统禁止SPKS防护区域外的列车驶入,并禁止防护区域内的列车移动。当且仅当在SPKS区域内以及即将驶入SPKS区域的列车均已安全停车,信号系统控制轨旁SPKS激活表示灯点亮后,工作人员才可以刷卡进入对应的SPKS防护区域。
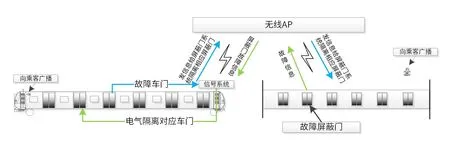
图3 车门/屏蔽门故障对位隔离示意图
(14)障碍检测。信号系统通过与障碍物检测设备以及车辆接口的方式获取列车运行前方的障碍物信息、列车脱轨等信息后,立即实施紧急制动并进行报警。若发生车上紧急手柄拉下、运行中逃生门打开、车辆制动力丢失等紧急情况时,信号系统也会采取措施进行防护,如立即实施紧急制动、进行报警等。
(15)系统联动。全自动无人驾驶系统实现与ISCS系统的接口与联动。当信号系统检测到异常时,会进行报警并将检测信息自动上传至控制中心,同时伴有语音报警提示,根据预设的报警类型,实现相应的联动监督以及防护控制功能,如控制列车运行至下一站停车、降级运行、紧急制动或疏散救援等。系统联动的场景主要包括:站台火灾、车辆火灾、紧急呼叫、紧急手柄、设备故障、检测到障碍物等[7-10]。
(16)车辆远程监督和控制。信号系统通过与车辆接口,实现控制中心对车辆的状态远程监督,并根据监督情况对车辆进行远程控制,如远程紧急制动、远程换端、远程开关门、远程复位、远程旁路、预设全线列车空调参数、远程控制列车照明开关等。
5 结束语
全自动无人驾驶系统可以实现自动发车、自动开关门、自动出入库、自动进站对位调整等,可提升全线尤其是车辆段/停车场的安全性和运营效率,实现车辆段/停车场的自动化调度,优化线路运营场景,降低司机的劳动强度,提升运营/系统应急处置水平。相比传统CBTC系统,全自动无人驾驶系统在优化列车运行、运营灵活度、工作人员角色转变等方面都有明显优势。但全自动无人驾驶系统是一个高度自动化、高度集中控制的大系统,除了对全自动无人驾驶系统的改造升级之外,还需要与其他系统及专业密切协调和配合,以保障列车运行安全有序并快速舒适[12]。
猜你喜欢
结构工程师(2022年2期)2022-07-15
城市轨道交通研究(2022年4期)2022-04-16
恋爱婚姻家庭(2022年9期)2022-04-13
恋爱婚姻家庭·养生版(2022年3期)2022-04-11
建材发展导向(2021年18期)2021-11-05
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年12期)2020-03-29