基于丰田OBD数据的常见驾驶行为分析
2019-12-02 08:02刘昱麟
中国科技纵横 2019年16期

摘 要:随着经济的发展和人民生活水平的提高,我国汽车数量不断增长,但与此同时道路交通事故持续发生。对此,学者从驾驶员驾驶行为的角度对其进行了研究。深入分析驾驶行为,有助于制定更合理的交通法规,设计更高效的交通系统,从而减少交通事故的发生。本文利用丰田OBD数据,实现了对常见驾驶行为的建模,包括刹车模型,急加速/减速模型,疲劳驾驶判断模型,超速行为识别模型,车辆变道转向的相关判断模型等。在此基础上,可实现对车辆停车、稳定行驶、加减速状态、急加速/减速、转向变道及转向灯合理性等行为的判定。本文重点对变道相关模型进行了分析和验证。结果表明,在误差允许范围内,模型计算结果与实际操作基本吻合。
关键词:OBD数据;驾驶行为分析;变道模型
中图分类号:U491.25 文献标识码:A 文章编号:1671-2064(2019)16-0000-00
0引言
随着社会的不断发展,驾驶行为逐渐成为评判司机技术的重要标准。不好的驾驶行为是引发许多的交通事故的主要原因之一,而好的驾驶行为有利于减少交通事故发生,因此对驾驶行为的分析十分紧迫。本文对驾驶行为进行分析,旨在为改善驾驶行为水平做出贡献。
本文数据来源于OBD(On-Board Diagnostic车载诊断系统),理由是OBD数据具有稳定、及时、智能、使用面积广的优点。OBD系统一般以智能手机作为服务显示设备,通过与智能手机互联,将OBD接口获取的汽车数据提供给车主。
驾驶行为的分析可以分为宏观、微观两大类,宏观驾驶行为是从车辆行驶数据入手推导原因,如从车辆加速度、速度、里程数、方向盘等判断驾驶员是否是疲劳驾驶等;微观驾驶行为是指驾驶员的具体决策导致的车辆行驶,如在做出超车决策后,需要判断周边环境信息做出超车决策等,以及决策行为会对整个交通系统的影响。本文基于丰田的OBD原始數据,从微观角度建模分析常见驾驶行为,重点对变道模型进行了验证。
1相关工作
车辆OBD系统为驾驶员操作分析和车辆能耗分析提供了基础。常见应用如,保险公司通过UBI车险与OBD数据模型有机结合,提出更有利于实现双赢的保险机制;在能耗分析方面,也有学者基于OBD数据并根据理想气体状态方程及空燃比原理对计算车辆油耗。能耗分析的延伸还包括通过分析车辆发动机的使用寿命,以及电动车的用能计算、碳足迹计算。
1.1 OBD数据
OBD数据指基于丰田汽车公司《车辆总线通信规范》,通过OBD设备以侦听方式采集车辆总线上各种行驶状态下的参数,包括丰田提供的330个车辆参数字段。涉及车型包括汉兰达、凯美瑞、雷克萨斯等。
1.2数据的问题及解决方法
由于车辆处于桥底或者隧道时,信号可能无法连接,也存在缓存过少导致数据丢失的现象,因此首先进行数据预处理。本文通过识别并标记数据噪声、去除不可靠的数据段的方式进行预处理,为模型分析建立打下基础。
1.3常见驾驶行为的模型
通过OBD数据可以分析驾驶行为。由于驾驶行为可以用多种不同的传感器参数进行描述,因此建立以下模型。
1.3.1转向判断(表1)
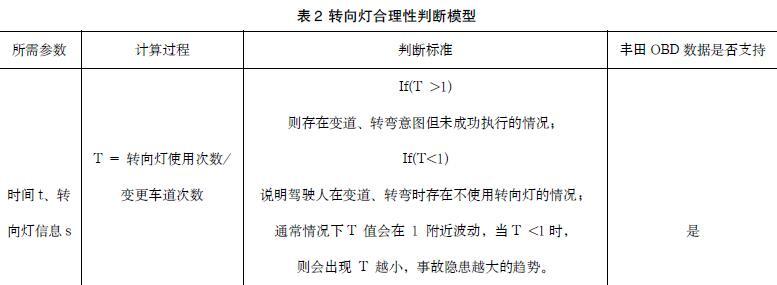
1.3.2转向灯合理性判断(表2)
1.3.3转弯模型
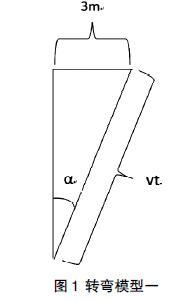
转弯模型的数据基础为10HZ频率收集的OBD数据,包括速度v(m/s),时间t(s),车辆横向加速度a(m/s2),方向盘转角s(°)。模型如图1。
如图1所示,假设车辆变换车道时的速度为v,变道过程近似认为匀速圆周运动,且实际中两条相邻车道中心线相距为3m,车辆变道的转向角为α,因此车辆变道过程中存在等式:
如图2所示,假设车辆转向时的速度为v,将每一个0.1s的小转向近似认为直角三角形,转向半径为,每0.1s变化角度为α,因此车辆变道过程中存在等式:
可对车速情况进行分类。规定速度v在(0,30)内为A类;速度v在(30,60)内为B类;速度v大于60为C类。再对数据的进行整理与归纳得到:
(1)A类转向或变道时方向盘转角s可变范围为(30,300)。
(2)B类转向或变道时方向盘转角s可变范围为(10,50)。
(3)C类转向或变道时方向盘转角s可变范围为(5,7)。
变道具体过程如下:
1)在车速处在对应类别并方向盘转向处在对应类别的情况下开始,对每0.1s的数据做处理,计算
2)对指定时间内的l进行求和,因为近似构成直角三角形,计算
3)若q在(30,45)内,则认为发生了变道
普通转向具体过程如下:
1)在车速处在对应类别并方向盘转向处在对应类别的情况下开始,对每0.1s的数据做处理,计算,以及
2)因为近似构成直角三角形,计算,并对指定时间内的q进行求和
3)若q在(70,90)内,则认为发生了转向
依据普通转向的判定方法,下面对转盘转向、S弯转向、高架桥转向与普通转向做简单对比,并给出对应计算模型,如表3。
2实验验证
本文重点对转向判断模型进行验证。原因在于转向时容易诱发事故,这也适用于对变道的分析。美国公路交通安全管理署(National Highway Traffic Safety Administration, NHTSA)的研究报告表明,变道事故占交警记录的事故总数的5%,占伤亡事故的0.5%。了解驾驶员变道的特征,有助于分析变道事故多发的原因,有针对性地采取措施,提高行车安全与交通运行效率。
2.1验证细节
针对上节所构建的转向判断模型,本文采用同期的驾驶过程记录视频作为检验证据。因可用于验证的车辆视频有限,且只涉及部分车辆,本文使用车辆行驶视频信息对模型结果进行验证。
2.2具体验证过程
以丰田车为例,根据所记录行驶过程的时间轴,与车辆行驶过程所录制的视频信息进行比较,并对车辆应该打转向灯的数据段进行标注(100表示车辆应该打转向灯),再将模型计算结果(-100代表打转向灯)与人工标注的结果进行匹配验证,部分结果如图3。
图3中蓝色为从车辆视频中人工标注得到的打转向灯的信息(为了便于比较,用值100标记实际应该打转向灯),绿色的为模型计算得到的打转向灯的信息(-100表示模型计算应该打转向灯)。
视频验证了2个行程,总计约2个小时,车辆实际共进行了60次转向操作,模型计算结果下车辆共进行了49次转向操作,对比之下,可以看出时间、打转向灯次数基本吻合。对于未匹配的部分,存在人工标注的误差。在误差允许的范围内,验证成功率达到80%。因此认为视频验证下模型基本正确。
3总结与展望
本文通过基于丰田汽车OBD数据的建模分析,实现的对于多种常见驾驶行为的分析。其中包括:刹车模型,急加速/减速模型,疲劳驾驶判断模型,超速行为识别模型,车辆转向的相关判断模型。本文重点对转弯模型的准确度进行验证。
本文希望能为将来的智能生活提供一定的支持。比如在司机转向时,系统可以对司机进行语言的提示,提醒有些习惯不打或晚打转向灯的司机,为广大的司机朋友养成一个良好的驾驶行为习惯。减少交通事故发生的频率,营造人人安分驾驶的优良的氛围。
参考文献
[1]王雪松,李艳.基于自然駕驶数据的驾驶员变道特征分析[J].交通信息与安全,2016(1):17-22.
[2]张凤,李永娟,蒋丽.驾驶行为理论模型研究概述[J].中国安全科学学报,2010,20(2):23.
[3]肖丽萍.基于OBD系统的特性分析[J].北京汽车,2006(5):29-32.
[4]刘雁飞.驾驶行为建模研究[D].浙江大学,2007.
[5]郭洪艳,陈虹,赵海艳,等.汽车行驶状态参数估计研究进展与展望[J].控制理论与应用,2013, 30(6):661-672.
收稿日期:2019-06-26
作者简介:刘昱麟,男,汉族,湖南武冈人。