面向操纵优化的智能列车辅助驾驶系统
2019-12-02 04:58高士根董海荣朱海楠
铁道学报 2019年11期
高士根, 董海荣, 朱海楠
(北京交通大学 轨道交通控制与安全国家重点实验室, 北京 100044)
目前,在列车驾驶及运行过程中,列车驾驶员从列车运行控制系统人机交互界面中获取的信息主要集中于列车速度信息(如当前速度、线路限速)以及站停信(下一站距离)等关键防护性信息,而对于其他重要信息如外部运行环境信息、前后列车信息等掌握不足,这既不利于列车驾驶员做出及时合理的操纵应对,亦不利于其执行优化的操纵行为。如何针对人工驾驶列车运行的特点,在保障安全的前提下通过一定的技术手段提高人工驾驶的操纵决策水平,对于实现列车节能准点运行及提升干线铁路运输效率具有重要的现实意义。
此前国际上对于列车辅助驾驶系统DAS(Driver Advisory System)及其功能扩展已经展开了很多探讨与研究,如德国的TAS系统、瑞典的CATO系统、德国的LEADER系统等,分别以不同的方式与形式进行了面向节能、准点的列车辅助驾驶系统的开发,并进行了部分的线上应用测试,取得了可观的效果[1-2]。而我国在这方面的研究相比起步较晚,且多集中于列车运行曲线的优化理论与控制方法等方面,对于人工列车驾驶环境下的列车运行优化的实现则考虑较少。如文献[3-4]根据我国的具体国情和路情对列车辅助驾驶系统进行了研究,并基于半实物仿真验证了所提出的系统与方法在应对典型运行场景时的作用。文献[5]针对列车节能操纵优化研究的基本问题,基于求解方法的特征对已研究的方法进行分类,将其分为解析方法、数值方法和仿真方法3大类。文献[6]对列车驾驶辅助系统的关键功能进行了技术对比,并进行了初步的系统设计;文献[7]依据列车牵引计算建立列车运行模型,将列车节能优化操纵问题转化为 最优控制问题进行求解,并设计货运列车运行仿真软件进行仿真验证;文献[8]以列车动力学模型为基础,建立了列车运行节能操纵方案的数学模型,并结合改进的遗传算法对列车节能操纵问题进行求解。
综上,辅助驾驶系统在提高驾驶员操纵列车水平 方面具备重要的意义,也已得到了较多研究人员的关注,但现有的辅助驾驶系统多采用离线优化加车载提示的方式,即采用离线优化完毕后的相关信息由车载端进行存储和调用提示,较少考虑在线优化的过程,使得系统的智能性、适用性与灵活性均受到一定的限制,当列车运行出现偏差或出现突发情况时亦缺乏足够的应对能力。本文将在文献[9-10]的基础上,以优化驾驶员操纵为目标,给出一种结合离线与在线的驾驶策略优化方法并基于半实物仿真平台进行验证,为智能列车辅助驾驶系统功能的充分发挥提供方法支撑。
1 智能列车辅助驾驶系统
智能列车辅助驾驶系统iDAS(Intelligent Driver Advisory System)是利用列车定位、测速等传感器信息,结合现代计算机技术与通信技术,实现列车运行环境信息通报、驾驶操纵方案优化与提示、潜在危险预警与应对、后备模式辅助运行等功能的辅助系统。其可在列控系统通过其主人机交互界面DMI(Driver Machine Interface)向列车驾驶员所提供的防护性信息的基础上,辅助列车驾驶员进行安全、节能、准点等的列车驾驶操纵,并可在列控系统发生故障时作为后备系统,辅助列车驾驶员进行安全目视行车,防止列车事故。
与列车辅助驾驶系统相比, iDAS与其的主要区别在于:首先不同于列车辅助驾驶系统多采用的仅有静态线路数据库,iDAS车载端集成列车状态信息采集功能,可实现列车状态信息的感知,为后台动态优化提供依据;其次依据车载端传输的列车状态,中心端可采用智能优化方法对列车运行曲线和操纵序列进行动态优化并将优化后的结果传送至车载端DMI,形成动态反馈机制以应对多变的运行环境,为列车驾驶员提供实用的操纵参考建议。
综合国内外现有的理论结果与工程实践,对智能列车辅助驾驶系统所需要考虑的主要信息进行分析与总结为:
(1) 列车运行环境信息提示:如前行和后续列车的相对位置、可能影响列车运行约束的天气信息等。
(2) 列车优化操纵相关信息:如面向节能和准点的优化操纵方案(运行曲线)提示、关键区段(如动能闯坡、电分相区域)等的提示等。
(3) 列车运行状态信息:列车当前位置、下一停站 距离、终点站距离、列车当前运行时分、下一停站时间预估、运行早晚点情况等运行时分信息。
上述3项关键功能所需的数据可来源于智能列车辅助驾驶系统自身具备的自主定位模块以及车-地、车-车之间的通信,无需与现有的列车运行控制系统进行直接交互,避免了引入智能辅助驾驶系统可能对现有列车运行控制系统的安全性所产生的影响。可选用智能手机、平板电脑等设备作为车载端设备,避免接口适配和设备改造等可能带来的较高成本。
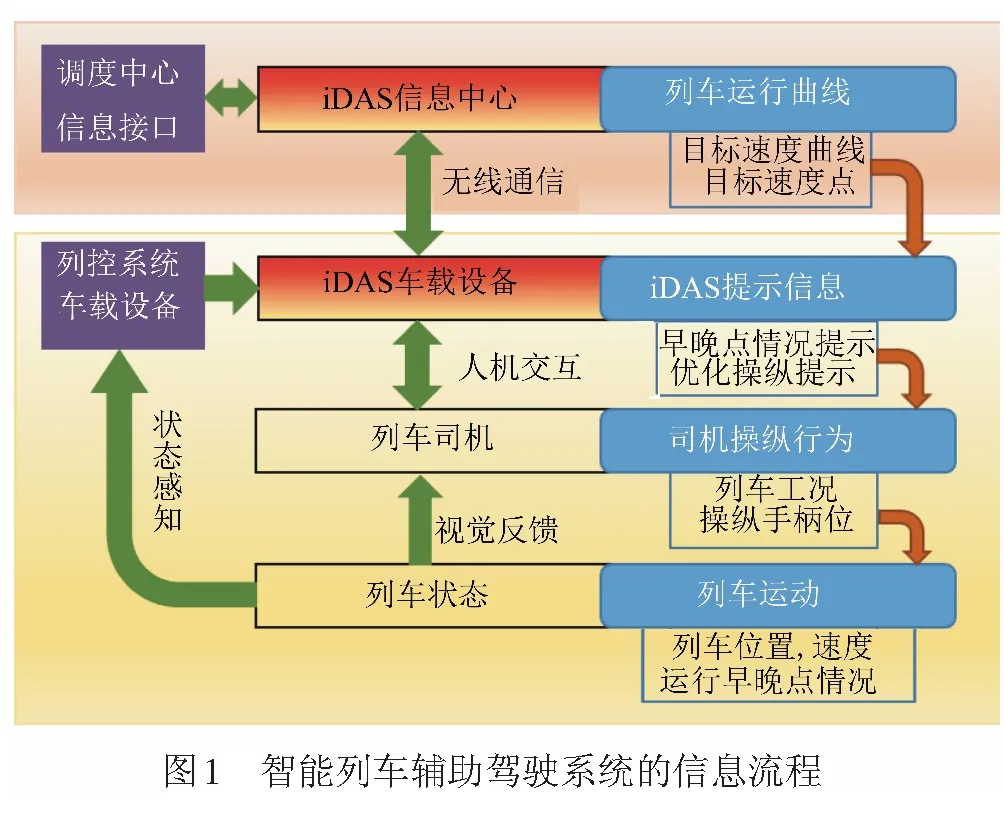
本文所设计的系统采用iDAS信息中心加iDAS车载设备两个层级的方式进行实现。其中,iDAS车载设备向列车驾驶员提供人机交互接口并从已有列控系统车载设备获取列车运行状态信息,之后将所获取的信息反馈至iDAS信息中心;iDAS信息中心负责根据iDAS车载设备反馈回的信息进行相应的列车目标运行曲线优化及其对应优化操纵序列的计算,再将所计算结果发送给iDAS车载设备进行提示与决策支持,同时需与现有调度中心进行调度命令、监控信息、列车运行状态等信息交换。两层级间由无线数据通信进行双向信息通信连接。本文所设计与使用的智能列车辅助驾驶系统的信息流程见图1。
2 人工驾驶条件下的列车驾驶策略优化
2.1 假设条件
针对人工驾驶所具有的独特特点,本文在进行列车运行曲线优化的计算过程中做以下假设:
(1) 根据文献[11]所得出的结论,列车在同一限速和坡度的子区间内运行时,其最优工况序列为最大牵引-巡航-惰行-最大制动的子序列。而在人工驾驶条件下,巡航(恒速)模式较难维持,因而本文采用“最大加速-惰行-最大制动”的子序列作为子区间内最优工况序列,即除需采取制动段的子区间外,其他子区间内采用牵引加惰行组合的方式进行操纵。
(2) 人工驾驶列车时,为保证运行平稳性和乘客舒适性,要求列车驾驶员在改变档位时遵循“缓提少切”的原则,即切换档位时要逐级切换,同时在整个运行过程中尽可能少地进行档位切换。
2.2 列车驾驶策略优化问题的数学模型
基于运动学定律受力分析的列车单质点动力学 模型为
( 1 )
式中:v为列车速度;s为列车运行里程(以运行起点为零点的相对距离);t为时间;Mt为列车的总质量;kt、kb分别为牵引和制动的标志位系数;F(cf,v)和B(cb,v)分别表示列车当前输出的牵引力与制动力,为与列车当前速度v及驾驶员控制器档位cf、cb相关的二元函数;G(s)为与运行里程相关的坡道所造成的作用力,表示为
G=Mt·G(s)=
( 2 )
其中,Lc为列车总计算长度,gi为列车当前所处子区间的坡度,li为列车处于当前子区间内的长度,n为计算点总个数;R(v)为列车所受基本阻力,由戴维斯方程进行计算为
R(v)=Mt·(av2+bv+c)
( 3 )
其中,a、b、c分别为滚动阻力、摩擦阻力、列车阻力系数。
列车运行优化目标函数由下式构建
( 4 )
式中:ε为功率传输系数;F(cf,v)为列车当前输出的牵引力;φ为列车自用电折算功率;ti为列车从第i个计算点到第i+1个计算点的运行时间;Tp为站间计划运行时间;w1、w2为权值系数。可见人工驾驶下的列车运行曲线优化目标函数由列车运行总能耗和列车站间运行时间偏差两部分组成。
目标函数所受到的约束条件为
v(0)=v(Tp)=0
( 5 )
cmin≤ci≤cmax
( 6 )
( 7 )
式中:cmin、cmax分别对应最大常用制动档位和最大牵引档位;Sp为站间运行距离。式( 5 )、式( 7 )对应列车的站间运行的空间约束,式( 6 )对应司控器最大档位约束。
上述式( 1 )~式( 7 )用于描述列车站间运行时其驾驶策略的优化问题,考虑列车自用电对总计算能耗的影响,并建立操纵档位与列车运行速度曲线之间的计算关系,可提高所采用数学模型对实际列车运行描述的准确性与模型的实用性。
2.3 结合离线与在线方法的求解算法
依据前述假设条件,列车的操纵过程可抽象为由一个离散操纵序列所决定的连续变化过程,即决策变量
( 8 )
式中:N为所划分的子区间数目;dN为第N个子区间内的牵引距离;cN为第N个子区间内所采取的牵引档位。决策变量与优化问题的数学模型之间的关系表达为
( 9 )
式中:si为列车在当前子区间内所运行的距离;V为线路限速。即若运行距离si尚未达到预设牵引距离di,则以牵引档位cn进行牵引(kt=1,kb=0);若si已达到预设牵引距离di,则后续段由惰行工况补足(kt=0,kb=0);若在运行过程中有运行速度vi超出V的情况,则按照相应规程进行制动操作(kt=0,kb=1)。

算法对应的主要步骤如下:
Step1
FORi=1:n
IFgi≠gi-1ORV-≠V+
THEN从点i起划分为新的子区间;
END
END
Step2
FORi=1:n
END
END
FORi=n:1
END
END
之后在VminT约束下设置并执行遗传算法流程,得到离线优化后的驾驶策略次优解及所对应的站间运行时间偏差Terr。
Step3
定义评价指标函数为
(10)
式中:d为该子区间内的原牵引距离;δd为迭代过程中选取的牵引距离变化量;Δs为距离计算间隔;m为子区间内计算点的总数量。子区间内牵引距离的分配路径由各子区间的该指标决定,具体反映为区间内单位运行时间变化量下的能耗变化量。
并建立各子区间内的评价指标δ(n);设定在线计算步长、站间运行时间误差容忍度Ttol及最大计算次数Nmax。
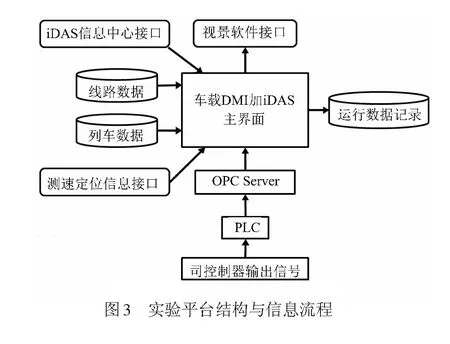
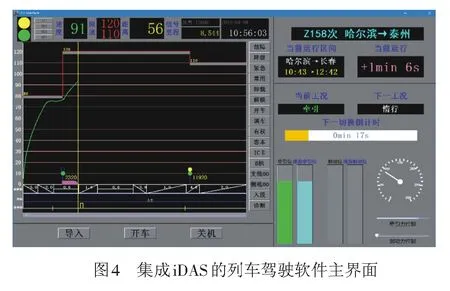
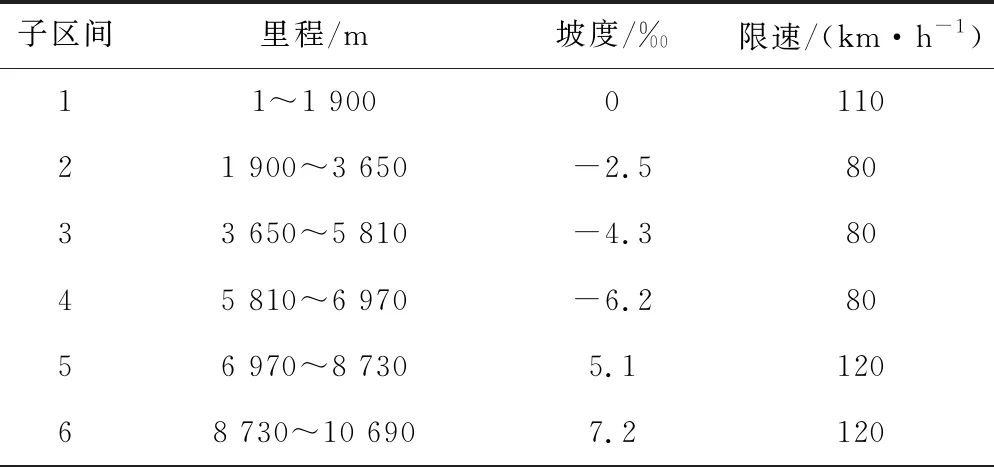
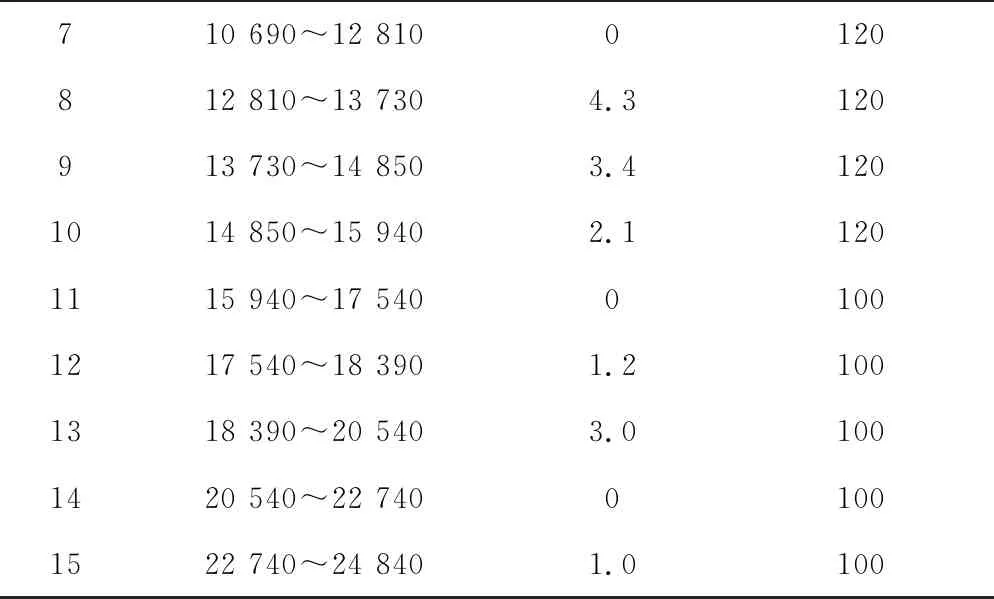
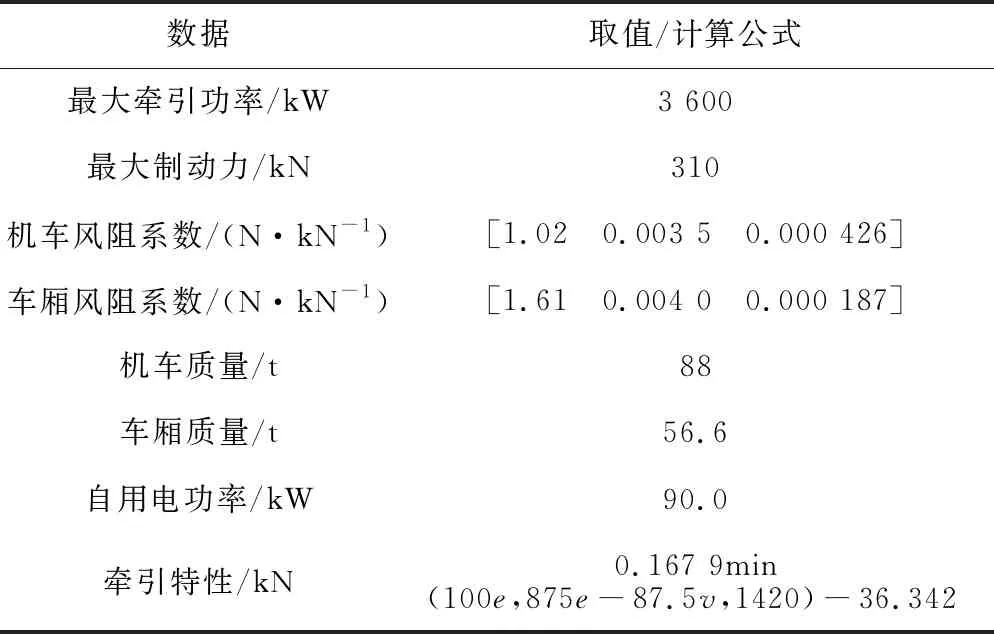
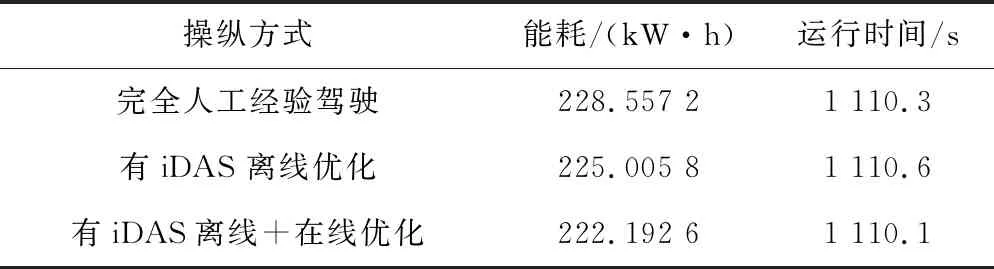
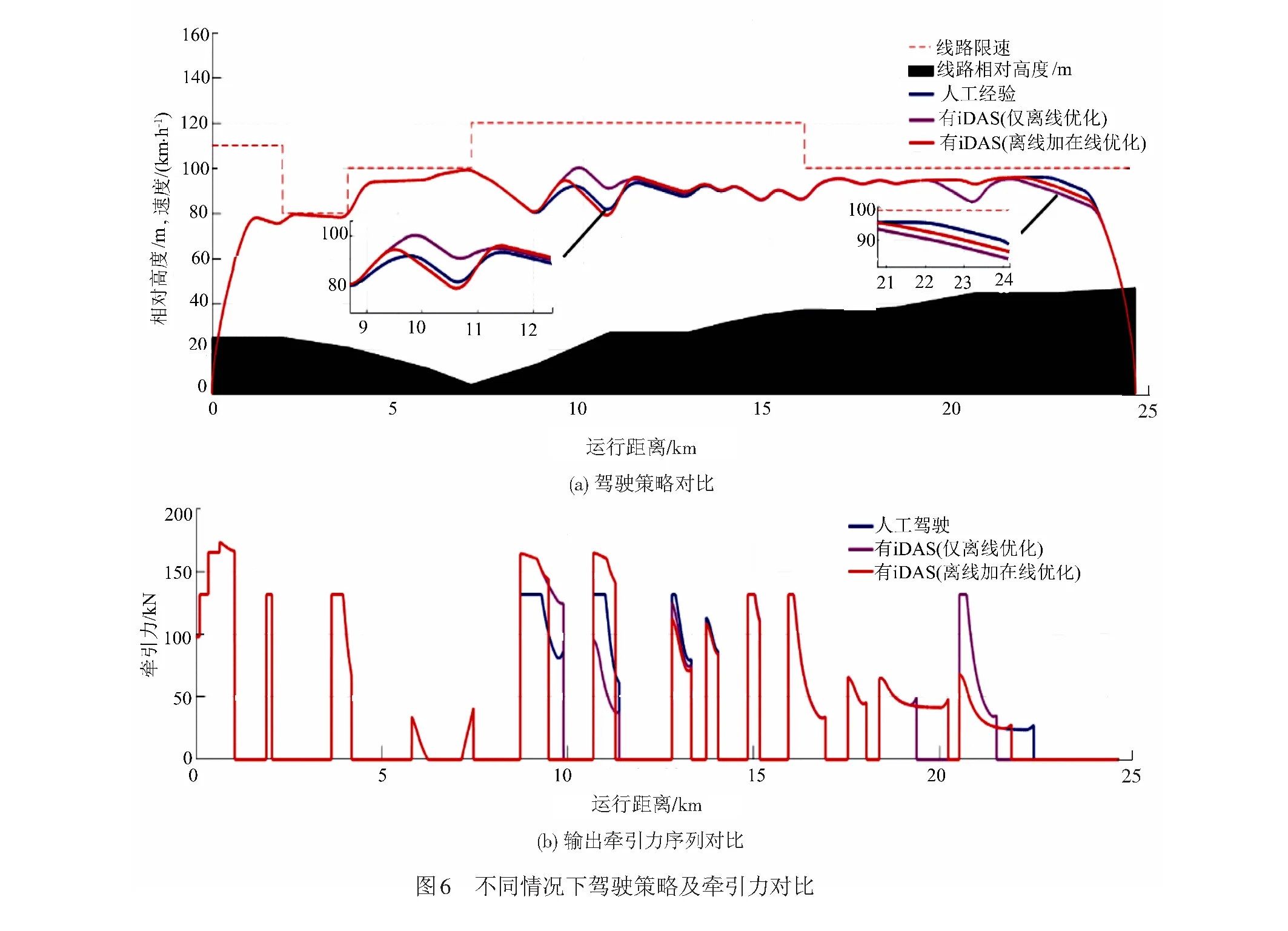
WHILE |Terr|>TtolOR当前计算次数 IF当前策略站间运行时间>预设站间运行时间 THEN调整具有最大评价指标的子区间内牵引距离由dn变为dn+δd,更新驾驶策略的总能耗及Terr; ELSE调整具有最大评价指标的子区间内牵引距离由dn变为dn-δd,更新驾驶策略的总能耗及Terr; END END 算法的流程图见图2。 为对智能列车辅助驾驶系统的功能进行测试,采用实物列车司机控制器加软件功能及界面方式开发了集成系统的半实物综合实验平台,平台主体功能组成与信息流程见图3。 列车驾驶过程由图4所示的PC软件界面及图5所示S640U型实物司机控制器共同进行模拟。图4中左侧为依据标准LKJ2000系统主界面所开发的软件界面,右侧为iDAS相关提示信息区域,包含车次号、始发终到车站、当前运行区间、当前运行时分早晚点情况、当前工况、下一工况以及切换倒计时、推荐操纵档位等信息。平台软件整体采用Java编程语言开发,具有良好的可移植性,同时为基于Android操作系统的移动端APP开发提供了便利,方便后续以智能平板电脑或手机作为车载端的iDAS系统的现场测试。 本文选用某型电力机车为例,在线路纵断面数据基础上,研究所提出的系统结构与方法的有效性。列车采用1机车加9车厢编组,车厢乘客定员按平均110人计算。实验中所用线路数据与车辆数据分别见表1、表2。 表1 实验案例中使用的线路数据 710 690~12 8100120812 810~13 7304.3120913 730~14 8503.41201014 850~15 9402.11201115 940~17 54001001217 540~18 3901.21001318 390~20 5403.01001420 540~22 74001001522 740~24 8401.0100 表2 实验案例中使用的车辆数据 注:牵引特性部分为基于列车牵引计算规程的计算公式,其中e为带边手柄位置,v为车速。机车风阻系数和车厢风阻系数3组取值分别对应式( 3 )中的a,b和c。 选取完全人工经验驾驶、有iDAS(仅离线优化)及有iDAS(离线加在线优化)3种典型情况分别进行若干次驾驶实验,所得到的仿真结果见图6。对仿真结果进行分析如下: (1) 纯人工驾驶情形下,驾驶员对上坡道的处理不足(6 970~8 730、8 730~10 609 m两个连续上坡子区间内采用的牵引距离过短或牵引档位较低),导致列车在上坡道子区间中的速度下降较为明显,并导致在后续驾驶过程中,驾驶员在列车进站前本应执行惰行或制动的子区间(22 740~24 840 m)内采取了额外的牵引工况以补偿运行时间偏差,造成了总运行能耗的增加。此情况下列车站间运行总能耗为228.56 kw·h,运行时间为1 110.3 s。 (2) 对于有iDAS(仅离线优化)情况,由于在上坡道子区间内(8 730~10 690 m)给出了较高的牵引档位及牵引距离提示,使得列车平均运行速度得以提升,在进站前的子区间内得以提前采用惰行工况,降低了 整体的站间运行能量消耗。由于离线算法本身属随机 搜索类算法,其存在的容易局部收敛等局限性导致所 得到的实际是次优解,反映在驾驶策略的调整上则相对较为激进(子区间20 540~22 740 m处出现了提前惰行加额外牵引的情况)。此情况下列车站间运行总能耗为225.01 kW时,运行时间为1 110.6 s,相比情况(1)的节能百分比为1.55%。 (3) 对于有iDAS(离线加在线优化)情况,在情况(2)离线优化结果的基础上,将列车运行状态考虑在内对各子区间内的牵引距离进行进一步调整,使得列车在保证运行时间不变的前提下进一步降低运行能耗。此情况下列车站间运行总能耗为222.20 kW·h,运行时间为1 110.1 s,相比于情况(2)的节能百分比为1.24%,相比情况(1)节能百分比为2.78%。 3组仿真实验的数据对比见表3。运行时间相差较小,均在可接受的偏差范围内(<1 s),证明了所提出的方法与系统在辅助列车驾驶员进行节能、准点的驾驶操纵方面的作用。 表3 实验案例的能耗运行时间结果对比 本文针对智能列车辅助驾驶系统展开研究,在分析列车人工驾驶操纵过程的基础上,设计了智能列车辅助驾驶系统的整体架构,基于区间内牵引距离与档位建立了人工操纵下的列车运行优化问题数学模型,并采用离线与在线相结合的算法对其进行求解,最后基于半实物仿真平台进行实验与案例分析,证明了智能列车辅助驾驶系统能够辅助列车驾驶员进行更好的节能准点驾驶。下一步工作将从半实物仿真平台的进一步改进、算法效率的提升及原型系统的研发及现场测试等方面展开,以期为智能列车辅助驾驶系统的现场测试和实际运用提供必要的准备。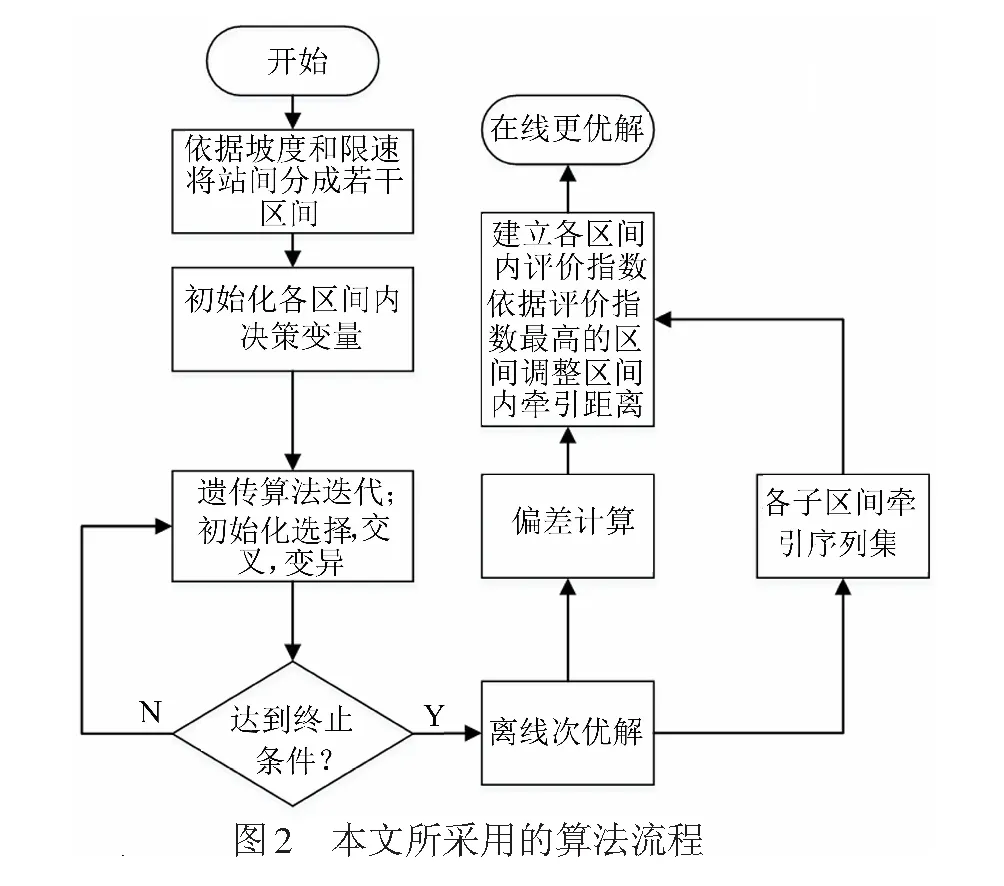
3 仿真与实验分析
3.1 半实物仿真平台的搭建

3.2 实验数据与参数
3.3 实验案例与结果分析
4 结束语
猜你喜欢
防爆电机(2021年4期)2021-07-28
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2019年12期)2019-05-21
铁道通信信号(2019年3期)2019-04-25
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
新民周刊(2016年20期)2016-05-25
海军航空大学学报(2015年3期)2015-11-11