
仪器维修远程协助机器人的研发
2019-11-30 12:14潘洁张伟峰李露露肖攀
科技资讯 2019年25期
关键词:机器人
潘洁 张伟峰 李露露 肖攀
摘 要:随着地震台站改革的不断深入,中心地震台模式的不断推行,越来越多的台站变成无人值守台和遥测台,全省几十甚至几百个台站仪器的维护维修任务变得越来越艰巨,仪器网线松动、仪器死机等这些很小的故障就必须省局负责仪器维修的人员奔赴现场处理,浪费大量的人力和物力。而仪器远程维修机器人能够让省局的仪器维修人员远程查看仪器状态,并且让操作机器人进行简单的维修操作和指导没有仪器维修经验的人配合完成维修,仪器维修远程协助机器人的研发为台站的仪器管理和维护能够提供了一定的帮助。
关键词:仪器维修 远程协助 机器人
中图分类号:TH76 文献标识码:A 文章编号:1672-3791(2019)09(a)-0007-02
Abstract: With the deepening of the reform of seismic stations and the continuous implementation of the model of central seismic stations, more and more stations have become unattended stations and telemetry stations. The maintenance tasks of tens or even hundreds of stations in the province are becoming more and more arduous, the network of instruments is loosened, the instruments are dead, and so on. These minor failures must be handled on the spot by the personnel responsible for the maintenance of instruments in the provincial bureau. With a lot of manpower and material resources, the remote maintenance robot of instrument can let the instrument maintenance personnel of Provincial Bureau view the instrument status remotely, and let the operation robot carry out simple maintenance operation and instruct those who have no experience in instrument maintenance to cooperate in completing the maintenance. The research and development of remote assistance robot of instrument maintenance can provide certain help for the instrument management and maintenance of the station.
Key Words: Instrument maintenance; Remote assistance; Robot
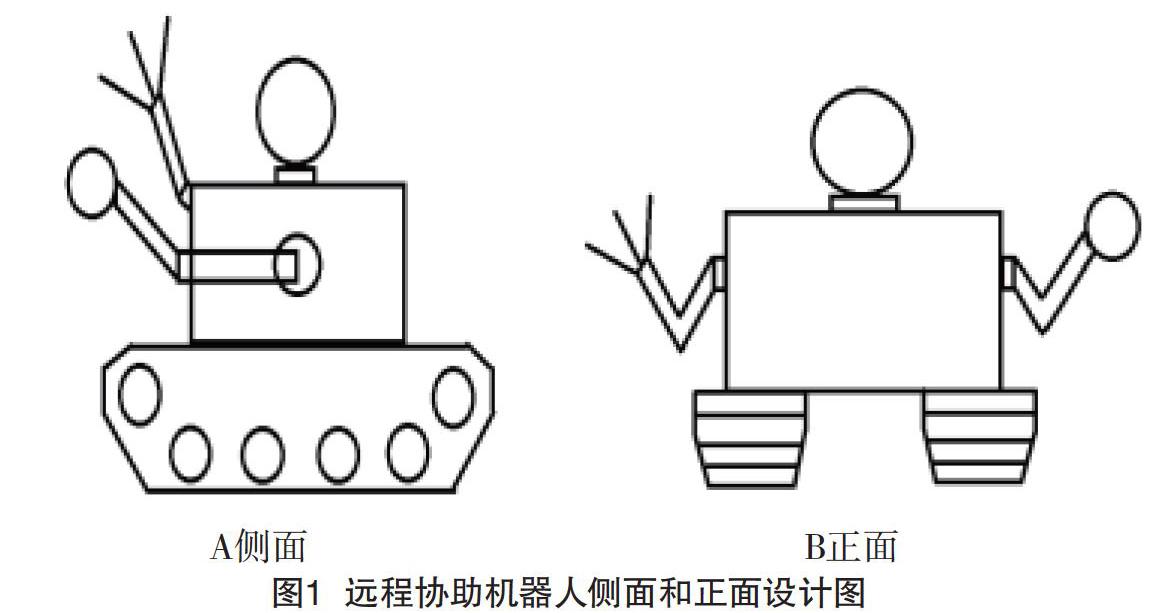
安徽省目前直属的上百个有人和无人值守台站,市县台站几乎所有的仪器维修都是由省局的仪器维修室负责的,维修任务尤为艰巨,特别是在恶劣天气和梅雨季节仪器故障的高发期。有时候仅仅是一个很小的问题,无人值守台站和没有一起维修经验的市县台站无法解决,为了数据的连续率,省局的维修人员只能疲于奔命。为了解决这个难题,受目前市场上出现了能够代替人完成各种工作的多种的机器人的启发,研制出一款专门服务地震仪器维修服务的机器人。这款仪器维修远程协助机器人主要有控制模块、驱动模块、传感器模块。机器人的控制模块主要是操作系统通过网络控制驱动模块和传感器模块,驱动模块能够按照指令驱动机器人前进后退和转弯。传感器模块主要分为语音可视模块和机械模块,并且能按照指令完成语音视频对话和简单的仪器重启等工作。这款机器人应用到地震台站的仪器维修有很多好处,首先这款机器人有针对性,造价不高,除了编程以外,硬件都可以选择市场上比较成熟的产品,减少成本。另外这款机器人可以针对仪器故障进行简单为维修,比如重启操作、对松动的线路进行加固等,最重要的是可以通过这款机器人的视频和语音对讲系统指导没有仪器维修经验的人配合维修仪器,在很大程度上减少了省局仪器维修室人力和物力的浪费。
1 远程控制模块的研发
针对台站仪器的维修,这款机器人要通过网络进行远程控制和操作。远程控制有控制端和受控方,控制端通过请求,取得对远端受控方的操作。受控方通过网络接收控制端发出的信息,并且向执行机构发出命令,驱动执行机构完成各种指令动作。控制端的软件以安卓版的手机APP的方式进行开发,这样更能方便仪器维修人员随时随地查看仪器状态并且进行维修或者指导其他人员维修。
1.1 控制端实现远程控制的程序设计
利用JAVA Socket编程,使控制端与被控端之间建立数据传输的数据流通道[1]。在控制端,实现对所有事件(Mouse、Key)的侦听,将所有事件封装在InputEvent类,并用对像输出流ObjectOutputStream发送到远端。同時,控制端为一个线程,不断地执行run()方法,将接收到被控端的画面数据(按远端转成字节数据的逆过程)转成图片,这些图片用javax.io.ImagIO转成一个字节数组,从而将每一个画面的数据量大小,以及数据用数据输出流往控制端发送,并在控制端显示,从而为控制端发布下一个指令提供画面支持。
1.2 受控方硬件平台设计
受控方的硬件主要有履带车驱动控制系统、远程视频系统、机器臂控制系统组成。选择一款电路板进行编程,将各个系统联系在一起做成一个完整的整体。
选择一款ARM9处理器为核心的QQ2440V3开发板作为该远程协助机器人的电路系统[2],由于该机器人需要对视频不断处理和传输,并且不断接收信息和发布指令,所有需要大容量的内存和较高主频的MCU,目前市场上流行的51单片机不符合要求[3]。采用免费的,源代码开放的编码。UC/OC-II具有结构小,执行效率高,可扩展性强的特点,能够满足基本需求。
2 履带车驱动系统设计
地震台站所处的环境一般较为偏僻,道路状况比较崎岖不平,针对地震台站的周围环境,这款远程协助机器人选择履带车作为移动平台。但是有时候维修仪器要到观测室内,为了保护观测室内的地板,这款远程协助机器人采用橡胶履带车最为合适,因为橡胶履带车具有噪音低、振动小、接地压小,接地面大、稳定性好、对机房等室内外地面破坏小等特点。履带车控制系统主要是选择合适的电路板进行编程,控制履带车前进后退和左右转弯,动力方面采用48V的大功率电机作为驱动器,选择市场上较为成熟的锂电池作为电源,这种电池有容量大、体积小、重量轻的优点,很适合作为本款机器人。
3 机器臂控制系统设计
由于地震台站内的仪器大都是安装在机柜内部,为了更好地查看仪器状态和维修仪器,该款远程协助机器人采用两个机器臂的设计,这两个机器臂各自能独立上下前后移动,是两个独立的系统。一个机器臂安装视频摄像头,因为我们地震台站的设备大都是安装在机柜上,仅仅靠机器人自身的一个摄像头无法合理控制高度,并且无法把摄像头靠近机柜内部的仪器查看仪器状态,机器臂上安装摄像头可以完美解决这一难题。另一个机器臂安装电笔等简单维修工具,能够依靠机器臂的移动完成仪器的重启以及简单的测量工作。
4 远程视频系统设计
视频系统是这款机器人的眼睛和嘴巴,机器人在接收控制方的信息后,发布指令给驱动器,控制机器人移动。控制方通过视频摄像头观察机器人前进方面的路况,并且还能和现场仪器维修人员通话,知道现场人员进行仪器维修。摄像头采用可编程的大视野工业摄像头,选择ARM9处理器为核心的QQ2440V3开发板进行编程,使摄像头能够上下前后移动,并能通过麦克风把现场声音传给控制方,并且本款摄像头采用能够允许多用户登陆的摄像头,方便维修人员在遇到障碍时,可以进行多用户登陆查看故障仪器,进行专家会诊。
5 结语
仪器维修远程协助机器人能够使省局仪器维修人员实时远程查看仪器运行状态,能够远程启停仪器,并且能够通过机器人对故障仪器进行简单的维修和指导没有仪器维修经验的现场人员进行仪器维修工作,并且在某一维修人员无法维修的时候,采用专家会诊方式查找故障,指导现场人员完成仪器维修工作。该机器人的研发能够为仪器维修工作节约大量人力和物力,并且在仪器发生故障的时候,第一时间进行响应,保障地震监测数据的连续性和完整性,为地震台站的仪器管理和维护能够提供了很大的帮助。
参考文献
[1] 姚晓芳,舒小松.基于Java socket网络编程的基础性应用研究[J].无线互联科技,2017(22):32-33.
[2] 史水娥,杨豪强.基于arm9处理器的机房环境远程监测系统设计[J].河南师范大学学报:自然科学版,2010(3):57-59,178.
[3] 楊威,艾铜青.GPRS远程监控系统及其软件编程分析[J].电脑知识与技术,2010(17):4690-4691.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
