汽车事件数据记录系统控制策略研究
2019-11-30 03:47刘全周李占旗陈慧鹏白稳峰
汽车电器 2019年11期
刘全周,李占旗,陈慧鹏,白稳峰,张 蕾
(中国汽车技术研究中心有限公司,天津 300300)
安全气囊的广泛采用始于20世纪80年代末,而汽车事件数据记录系统 (event data recorder system,EDR)是伴随着安全气囊的发展而出现的,为获得触发安全气囊所需的数据,汽车生产商开始在气囊控制模块中安装一个小型存储器,这就是 EDR的雏形。EDR所记录的碰撞前速度、ΔV时间变化曲线、发动机转速、气囊点爆状态、制动状态、安全带使用状态、加速踏板位置、车辆挡位等多项数据,为事故调查、事故还原提供重要的原始数据支持,从而可以客观地、科学地划分汽车厂商和驾乘人员的事故责任[1]。同时也可以作为考核驾驶者违规操作的重要监督手段,这种“监督”及“见证”的功能,大大提高了驾驶者的安全责任感,从而大幅度降低了事故率[2]。
目前,汽车事件数据记录系统国家标准尚在制定过程中,EDR功能大多集成于安全气囊控制器中,并未出现真正独立存在的EDR产品,也没有完善的EDR系统开发方案提出。EDR是一种法规性的产品,将在配套法规的支持下推广应用,国外的经验做法就是这样,国内也将如此,可以预见国标制定完成并正式实行后,EDR产品必然成为国内车辆的标准安全配置。
本文从EDR系统实际应用需求着手,确定需记录的事件数据,进而对EDR的完整控制策略展开研究。
1 EDR数据选择
EDR所记录数据对事故还原、分析提供了重要的数据支撑,改变了此前过多依赖行驶痕迹进行事故分析的方式,因此数据的选择需充分考虑第三方使用需求[3]。从EDR数据来源分析,EDR所记录数据来自于车上不同的控制器、自身所连接的传感器以内部计算值,其中其他控制器的数据通过CAN总线传递给EDR,传感器数据通过硬线传递给EDR。车辆提供数据的不同控制器目前主要包含车身控制模块、动力底盘控制模块、主被动安全模块及高级驾驶辅助系统模块等[4]。
美国联邦法规“49 CFR Part 563”中规定安装 EDR的车辆必须记录速度变化量 (纵向)、最大速度变化量 (纵向)、最大速度变化量 (纵向)、车速、节气门开度、制动踏板状态、点火周期 (碰撞时)、点火周期 (读取数据时)、驾驶员侧安全带状态、正面气囊报警灯状态、驾驶员前侧气囊展开时间、左前成员前侧气囊展开时间、多次事件的次数、多次事件的时间间隔、事件记录完整性等15项数据[5],目前可实现EDR功能的车辆也基本满足上述数据的记录要求。
但随着新能源车辆的逐步普及、高级驾驶辅助系统(ADAS)的广泛应用,规定中所要求数据已无法对车辆的状态描述进行全面覆盖,不能够满足实际应用需求,数据种类急需拓展与补充。现整理并汇总以下16项数据 (详见表1),并分为ADAS数据、新能源数据、控制器信息数据等3大类。
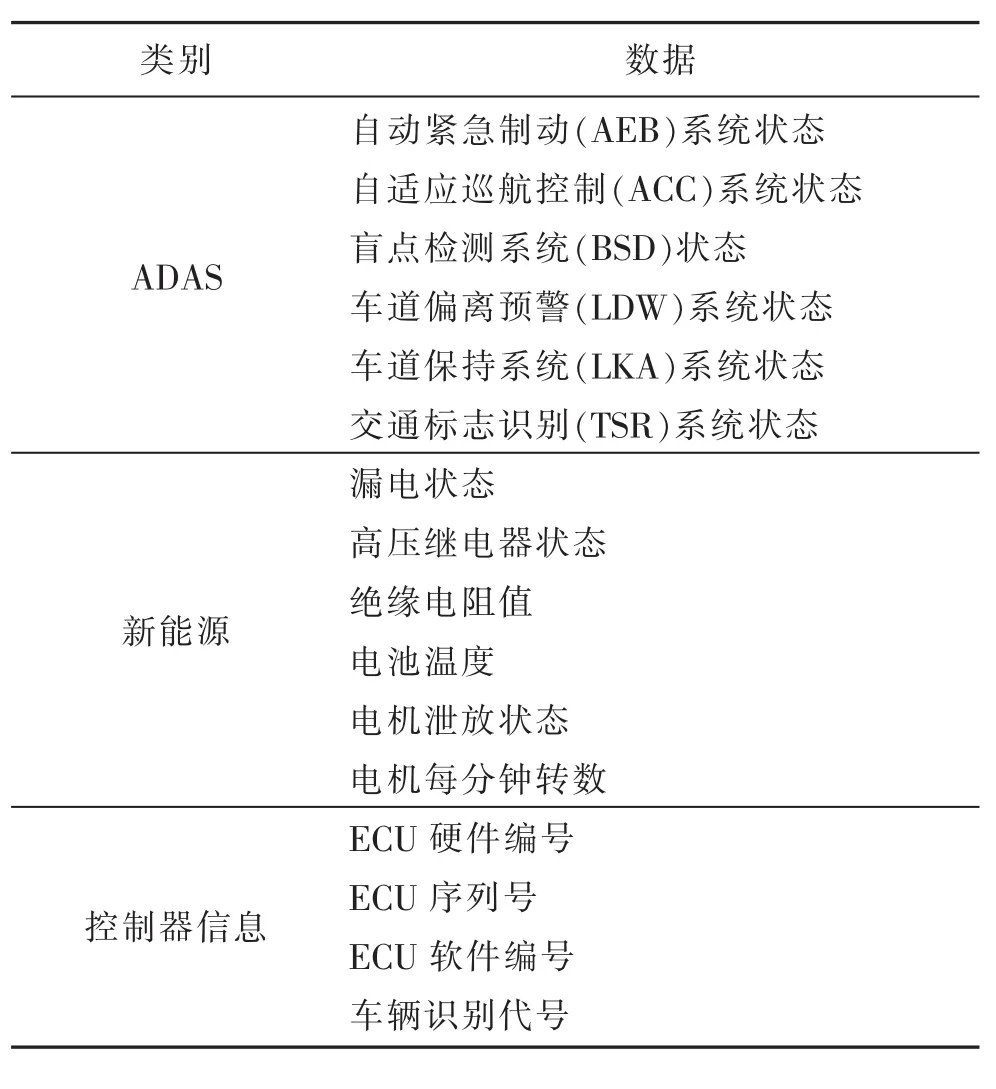
表1 需补充数据
ADAS数据表征了ADAS各系统的功能状态,可以用于分辨碰撞前后车辆状态的实际控制源是驾驶员操作还是车辆自主控制,由此可以准确判定事故成因、判别操作责任等[6]。对于新能源车辆碰撞事故,电池状态的反映有着重要作用,上述新能源数据可以充分表征碰撞前后车辆动力电池的关键状态。控制器信息数据主要用于数据记录与控制器的匹配与对应,保证数据的真实性与可信度。
2 EDR系统构成及控制原理
EDR系统由外围碰撞传感器、EDR控制存储单元、数据提取工具、数据显示与分析软件等4部分构成,如图1所示,可实现事件数据的触发与锁定、数据存储记录、数据提取、数据分析及事故还原等功能。
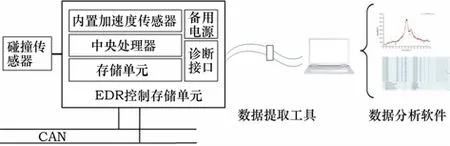
图1 EDR系统构成
EDR控制策略主要包含系统初始化模块、功能主程序模块、数据读取模块、故障诊断模块等,实现流程如图2所示。初始化模块主要实现系统初始化及硬件自检,功能主程序模块主要实现事件数据的触发、锁定及存储,数据读取模块主要实现数据提取,故障诊断模块主要实现故障机制。
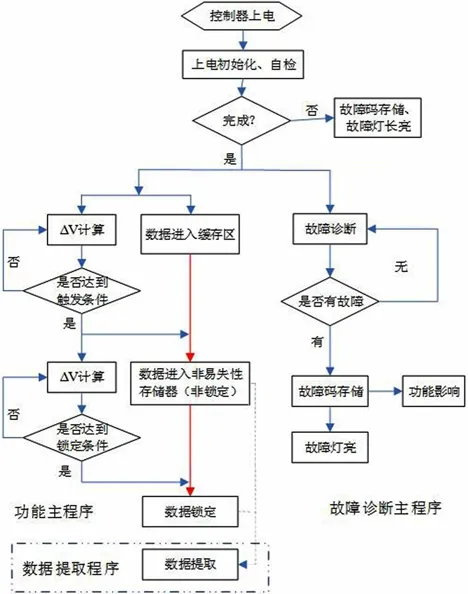
图2 EDR控制策略组成
2.1 初始化模块设计
初始化模块主要实现对ROM、RAM、A/D模块、加速度传感器、电容等进行自检,并设置相关系统参数及各模块工作模式,包括通用IO端口、定时器、AD转换控制器、CAN控制器、中央处理器、存储器等[7]。
控制器上电后EDR进入初始化过程,在初始化过程中主程序模块、故障诊断模块不工作。初始化过程不通过时,会产生相应故障码,并存储在RAM中,此时控制器对外输出故障灯控制信号。初始化过程中故障指示灯亮,初始化结束且通过时,故障指示灯灭,否则保持常亮。控制器每次上电,初始化程序均进行一次。
2.2 功能主程序设计
功能主程序模块主要实现事件数据的触发、锁定与存储,本控制器依据碰撞强度设计2个阈值,分别实现数据的触发非锁定、触发并锁定,可实现最大3次数据存储,且数据记录时长共计5.25s。
2.2.1 数据缓存设计
上电初始化过程完成后,来自于碰撞传感器、CAN总线等的所有待记录数据进入数据缓存区[8]。由于EDR需记录碰撞前5s及碰撞后250ms的数据,根据各数据的数据长度、记录精度、记录数量计算得到缓存空间大小,为充分利用该存储空间且提高存储效率,数据缓存采用堆栈方式处理,遵循先入先出的原则,当缓存空间填满后,最早进入缓存的数据将被顶出。
2.2.2 数据记录触发
1)申报子系统。通过系统,申报者可以不受时间与空间的限制进行在线项目立项申请、中期检查申请、结题申请、项目修改申请等,通过申报者身份可以登录系统查看和管理本人所有教改项目,查询项目状态及专家评审意见等信息;同时作为教改项目的资料库,申报者还可以随时调取相关项目申报资料。
上电初始化完成后,内置加速度传感器的纵轴、横轴加速度信号,经过A/D转换、滤波处理后,进入控制器。
采用移动窗算法实时计算纵轴与横轴ΔV,当纵轴或横轴方向上,150ms内车辆速率变化小于8km/h时,输出控制值0;当纵轴或横轴方向上,150ms内车辆速率变化等于或超过8km/h时,输出控制值1。如果事件持续时间小于150ms,那么触发阈值指的是从最近的时间零点算起,等于或者超过8 km/h的车辆速率的变化。控制值为0时,缓存区内的数据不会被存储到非易失性存储器中;控制值为1时,缓存区内的数据被存储至非易失性存储器中,并被标记为事件X1。
为节省存储空间并使数据存储指令简化,数据存储按照数据采集周期进行分类,分别按照2ms、10ms、100ms、500ms及单次分别进行存储,当控制值置为1后,缓存区内的数据进入非易失性存储器。
2.2.3 数据记录锁定
若无不可逆的约束装置 (气囊、安全带张紧)展开、或ΔV未达到第二阈值时,非易失性存储器中事件X1的数据不被锁定,此时锁定标志位为0;当出现不可逆的约束装置展开或ΔV达到第二阈值时,非易失性存储器中事件X1的数据被锁定,此时锁定标志位置1。
非易失性存储器最多可存储3次事件数据,且数据的覆盖满足以下规则。
1)当非易失性存储器未存满3次事件时,锁定与非锁定数据均不被覆盖。
3)被锁定的事件数据不被任何后续事件数据所覆盖。
2.3 数据读取设计
EDR所存储的事件数据需通过专用的提取工具进行事后提取,提取过程需保证数据的完整性与安全性[9],因此数据的提取需先经过校验步骤,当校验通过获得数据提取权限后方可以通过特定传输方式进行数据提取。数据提取方式可以通过Ethernet、CAN、LIN等多种协议实现,由于CAN总线在汽车上的广泛应用,目前基于CAN的数据提取方式仍为主流选择[10],可分别采用物理寻址、功能寻址进行,每种方式都存在自身的优势与限制,充分考虑到提取方式的通用性,特设计功能+物理的提取方式。
具体为当数据提取工具和EDR连接后,上位机软件检测通信是否正常;正常通信后,工具端发送7DF功能寻址请求,请求EDR物理的ID;收到请求后,EDR向工具端发送本控制器的物理ID信息[11];基于该物理ID信息,工具端向EDR发送VIN请求,当EDR反馈正确VIN信息后,校验完成;随后工具端向EDR发送数据提取请求,EDR中所记录信息按照存储方式进行上传;数据提取完毕后按照选择存储在指定路径。数据提取流程见图3。
2.4 故障诊断设计
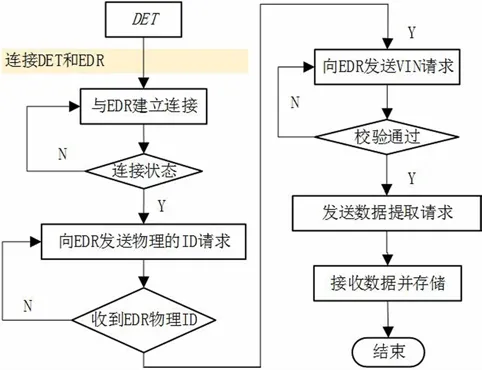
图3 数据提取流程
故障诊断功能是EDR中必不可少的组成部分,更是提高控制器可靠性的重要手段,在汽车控制单元的代码总量中,故障诊断代码量会占到60%甚至更多[12]。故障诊断能够对系统的各个节点进行诊断,并把诊断结果存储到相应的存储器中,当发现系统出现故障时,会产生故障代码并对功能造成影响。
EDR故障可分为两大类,即内部故障与外部故障[13]。内部故障主要是EDR控制单元的故障,它包括模块内部的所有可能发生的故障,如看门狗出错,存储器读写错误,A/D模数转换错误,加速度芯片自检错误等。内部故障是致命的,因为控制单元是EDR条件判定、数据存储的主要实现方,一旦出现故障可能会导致记录无法被触发,数据不能被锁定等情况,其后果很严重。因此当出现此类型故障时,EDR会点亮指示灯,提醒驾驶员进行维修或更换[14]。外部故障指与EDR连接的外部器件所出现的故障,如外置加速度传感器连接线故障、总线传输故障、供电电压故障等。此类故障往往是由于线束开路、短路等电气原因造成[15]。
根据EDR控制器工作特点,本系统故障诊断设置见表2。
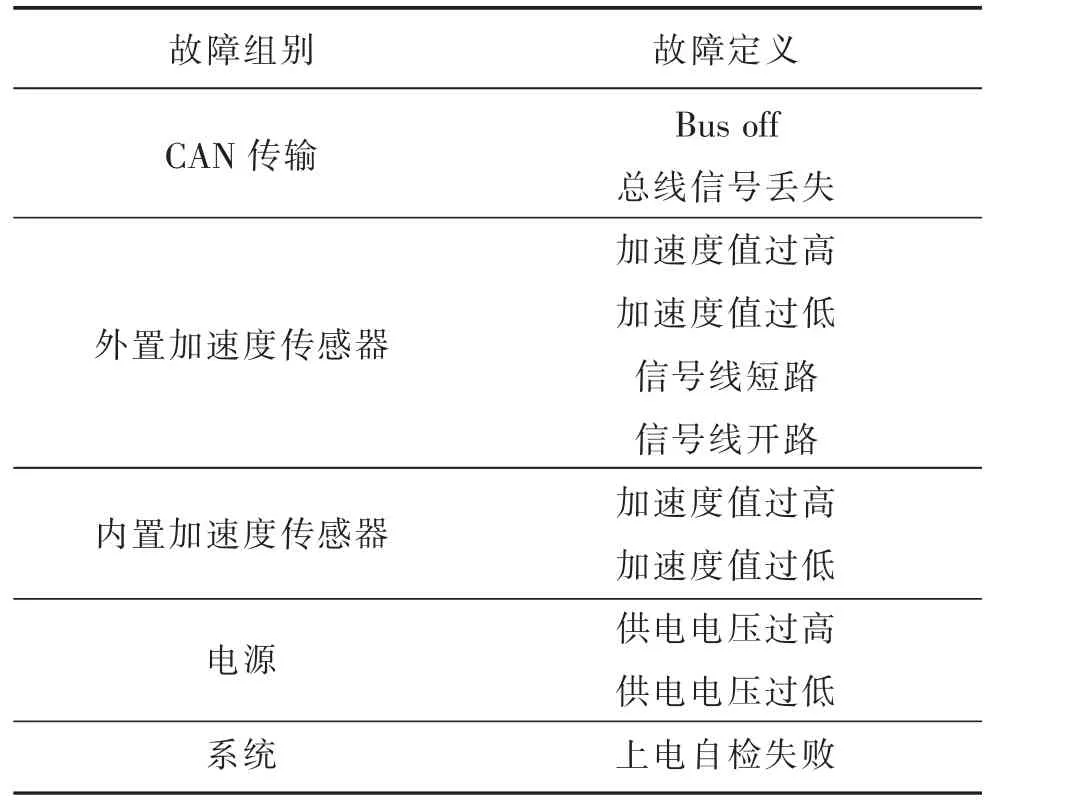
表2 故障诊断设置
3 结束语
本文分析了国外法规对EDR数据记录的要求,并基于新能源汽车、ADAS应用趋势的分析,整理出16项实际需求数据。对EDR的功能、诊断策略进行研究,给出了完整的控制策略组成,并设计了包含校验、物理+功能的数据提取流程。EDR为交通事故中碰撞过程还原、责任认定提供了强大的数据支撑,已成为进一步提高事故调查水平,提出更加有效的事故预防措施的重要保障,对其数据记录种类及实现技术的深入研究具有重大的现实意义。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
汽车实用技术(2022年9期)2022-05-20
北京航空航天大学学报(2021年6期)2021-07-20
网络空间安全(2019年8期)2019-03-18
环球时报(2014-06-18)2014-06-18
科技传播(2012年10期)2012-06-06
计算机世界(2009年27期)2009-07-30