
汽车倒车预警系统的设计
2019-11-29 06:57张琦
汽车实用技术 2019年22期
张 琦
(德州学院 汽车工程学院,山东 德州 253023)
前言
车辆的不断增多造成了交通拥堵以及停车位的不足,汽车在倒车时极易引发碰撞,同时倒车的失误会引发甚多交通事故的发生。而造成这些倒车事故频发的主要原因包括:驾驶员的操作技术不熟练、倒车镜有死角以及视线模糊等[1]。这些事故的发生给事故双方都带来了诸多麻烦,以及不必要的损失。研究和开发倒车预警系统等主动式汽车辅助安全装置可以有效的减少交通事故的发生。倒车预警系统的应用可以减缓驾驶员的负担,减少判断的失误,对于提高交通的安全起到了重要作用。
1 汽车倒车预警系统的组成及工作原理
汽车倒车预警系统能够测量车体与后方障碍物的距离,当距离超出限定数值存在碰撞危险时,会对车内驾驶人员进行适度预警提醒。该系统主要是由四个模块组成:
(1)超声波传感器模块。主要由超声波发射和接收电路组成,倒车启动时,发射超声波,遇到障碍物时能产生回波信号送控制器。
(2)信号处理模块。接收传感器信号,由控制器根据设定程序进行处理,将处理的结果发送显示和预警模块。
(3)温度补偿模块。检测车辆外部环境的温度并进行补偿。
(4)显示与预警模块。车内显示显示装置用于倒车时实时显示与障碍物之间的距离。当车辆和障碍物的距离小于限定距离时,预警装置发出警示。
汽车倒车预警系统的结构如图1 所示。
汽车倒车预警系统采用超声波传感器,实现汽车与后方物体之间的距离的测定。当汽车挂入倒挡时,汽车倒车预警系统启动,发射的超声波经物体反射后返回传感器,传输给信号处理模块进行处理,经控制器计算出具体的距离信息,达到安全距离下限时发出预警信息。
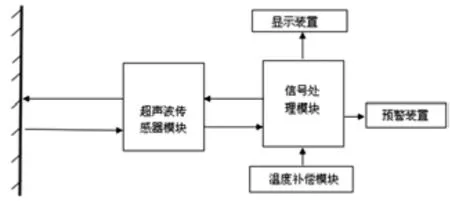
图1 汽车倒车预警系统结构图
对于超声波而言,其传播距离相对较近,在遇到阻碍物后会有反射,然后可以根据传播时间的长短、被反射超声波的强弱来判断障碍物的性质和大致的距离[2]。反射波信号通过信号处理模块转变为电信号,测出从发射超声波至接收到反射波的时间差t[3]。被测障碍物的距离s等于传播速度c 与时间差t的乘积,即s=ct/2。
2 汽车倒车预警系统的硬件设计
2.1 传感器模块
超声波传感器应满足以下几个要求:(1)有良好的测距准确性;(2)抗干扰性能好,工作稳定;(3)实时性好;(4)性价比高。基于以上几方面的要求,选择HC-SR04 超声波传感器。HC-SR04 实物图如图2 所示。

图2 HC-SR04 超声波传感器
2.2 信号处理模块
信号处理模块由A/D 转换器、单片机、放大电路等部分组成。其中单片机采用低电压、高性能的8 位处理器的AT89C51 单片机。信号处理模块结构图如图3 所示。

图3 信号处理模块结构图
2.3 温度补偿模块
选用DS18B20 数字温度传感器,反应灵敏度高,而且温 度的延迟变化极其的小。DS18B20 采用的是3 脚PR-35 封装,适用电压3V-5V,可以调节9 到12 位的分辨率,编程温度有0.5℃、0.25℃、0.125℃和0.0625℃,信号和电源集成在一起,只需要一根线连接。
3 汽车倒车预警系统的软件设计
软件部分主要由主程序、距离计算程序、超声波程序、测温程序和显示预警程序等组成。
主程序工作流程:温度传感器测量空气温度,计算调整超声波速度,超声波测距模块接收到测距信号进行测距,单片机启动定时器开始计时。当单片机检测到HC-SR04 超声波测距模块送来的回波时,计时器停止计时,保存定时器的计数值,通过程序换算出距离值,送显示装置显示;进行判断处理,达到预警值时进入预警程序。
主程序流程图如图4 所示。
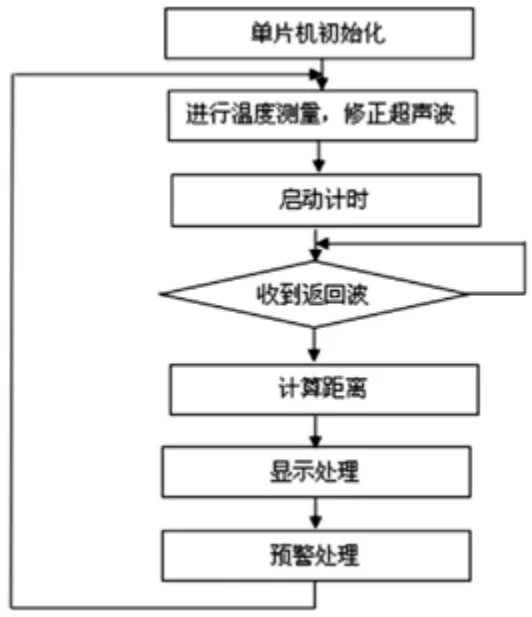
图4 主程序流程图
4 结论
汽车倒车预警系统能够减少倒车事故的发生,保障驾驶员的行车安全。本文对汽车倒车预警系统的软硬件部分进行了设计,以AT89C51 单片机作为处理器,使用单片机计算汽车与障碍物之间的往返时间,通过公式计算出汽车与障碍物的距离,并通过通过显示装置将距离显示出来,当距离小于设定安全距离时发出预警信号。
猜你喜欢
财会学习(2022年7期)2022-11-13
中国交通信息化(2022年7期)2022-10-27
包装工程(2022年9期)2022-05-13
医学食疗与健康(2021年27期)2021-05-13
动漫界·幼教365(中班)(2020年3期)2020-04-20
环球时报(2019-12-30)2019-12-30
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
