基于MBus的水肥一体化施肥机传感器监测系统研制
2019-11-28 07:49:10高菊玲孙昌权
节水灌溉 2019年11期
高菊玲,孙昌权,黄 锋
(1. 江苏农林职业技术学院机电工程学院,江苏 句容 212400;2.江苏省现代农业装备工程中心,江苏 句容 212400)
我国人口已有14亿人,人均耕地面积小,淡水资源短缺[1],严重威胁着农业的正常生产。因而节水灌溉研究一直都是一项重要而紧迫的任务。随着滴灌、微喷灌、喷灌等技术的发展,能够将水肥结合起来的水肥一体化技术也在不断进步[2]。
水肥一体化技术是以滴灌和喷灌技术为基础,能够一次性将植物所需的肥料和灌溉水输送给植物,满足植物的生长所需。近年来随着无土栽培技术的普及,在克服土壤连作障碍,提高投入产出比,提高农产品质量方面,无土栽培技术显示出强大的发展潜力[3]。但无土栽培面临着栽培基质无法提供充足养分的问题,水肥一体化技术正是这个问题的解决方法。水肥一体化技术和无土栽培技术的结合可以说是顺应了农业科技的发展。现阶段,施肥一体化技术的研究,有的是施肥机控制算法的研究[4-6],有的是施肥机混肥系统的研究[7,8]。为了提高肥料的利用率,降低生产成本,各种信息技术也进入到农业领域中,将物联网与作物栽培结合起来[9],发挥植物的生产潜能。可以预见,未来的水肥一体化技术,将会是自动化控制、植物生长生理、信息技术三者的相互结合。
与此同时,在工业控制领域,智能化仪表、电磁阀控制技术日趋成熟,甚至人们生活中,也出现了远程抄表技术[10]。这些技术能够提高设备的自动化程度,减少人的维护复杂程度,实现实时的远程监管[11]。这些技术在农业上是否有适用的场合,需要不断地探索。
本文对水肥一体化施肥机的传感器网络展开研究,使用电力线载波技术实现传感器节点的供电和通讯,采集施肥区域的环境参数,进而控制施肥机的运作。对该技术的可用价值进行评价,以期为该技术在农业上的应用提供参考。
1 施肥机水肥一体化技术和MBus技术
1.1 施肥机水肥一体化技术
水肥一体化技术,以滴灌和喷灌技术为基础,使用管道输送水,配合肥料融合和肥料调节施肥装置,将灌溉水以及作物需要的肥料一次性输送到植物根系的施肥技术[12]。
一般而言,水肥一体化技术包括两个层面,一是硬件层面,包括贮肥罐、混肥器、施肥管路和各种电磁阀;二是软件层面,用于和作物、环境相耦合,实现精准的肥料施用控制,进而提高肥料的利用率,提升作物的品质,减少对环境的污染。
在实际的生产实践中,人们逐渐意识到水肥一体化技术能够降低生产成本,减少水资源的利用,有效提高作物的产量。如果能够根据作物需水需肥规律,制定合理可靠的灌溉施肥制度,将会更进一步提升作物产量,保证较高的作物品质。
1.2 MBus技术
Metering-Bus简称MBus,是一种专门为计量仪表数据远程传输而设计的主从式半双工总线,只需2根线缆,便可完成主站与远程从站之间的通讯。
MBus系统的一般结构见图1,包括一个主站和多个从站。MBus采用“主站呼叫-从站应答”的方式通讯,从站之间不能直接进行通讯。Mbus使用两线制通讯,不区分正负极、施工简单、故障率低,总线具有一定的带载能力,能够直接给从机远程供电,使用独特的电气特征传输信号,拥有优秀的抗干扰能力。Mbus技术广泛应用于测量仪表数据数字化中,比如数字抄表系统、大型商场的火警监测系统等[13]。
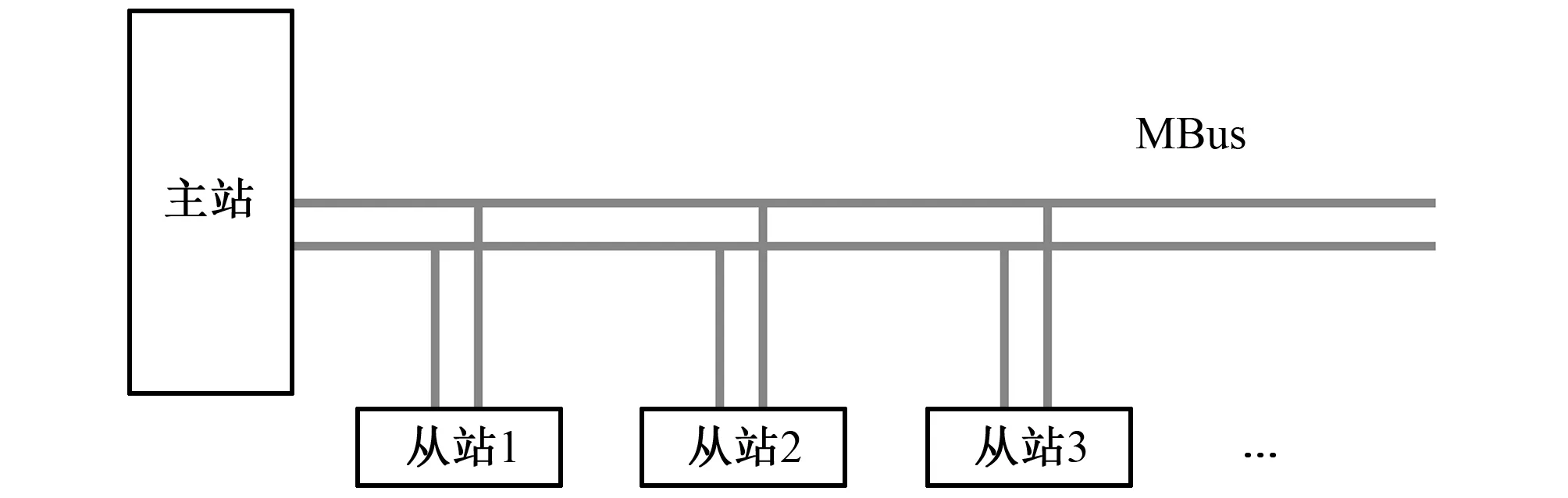
图1 MBus系统的一般结构
与MBus应用场景相近的还有RS485技术。但是RS485技术存在一些不足:容量少,接入设备不能超过128个;通信速率低,随着距离的延伸,通信速率迅速降低;只能采用非隔离的通讯方式,不适合长距离的户外通讯;不能给设备直接供电;RS485的芯片功耗较大,容易增加线路上的电压降;布线方式受限制,只能使用串行方式。这些局限,更能显示出MBus的先进。
2 基于MBus的施肥机传感器监测系统设计
2.1 系统架构与组成
一般而言,施肥机组成包括:供水系统、搅拌电机、母液桶、增压泵、混肥器、施肥管路、终端施肥的执行机构、电磁阀、控制器和人机交互界面(HMI)。
为了降低系统复杂程度,重点验证MBus技术在施肥机方面的应用,本系统的施肥机架构与组成见图2。
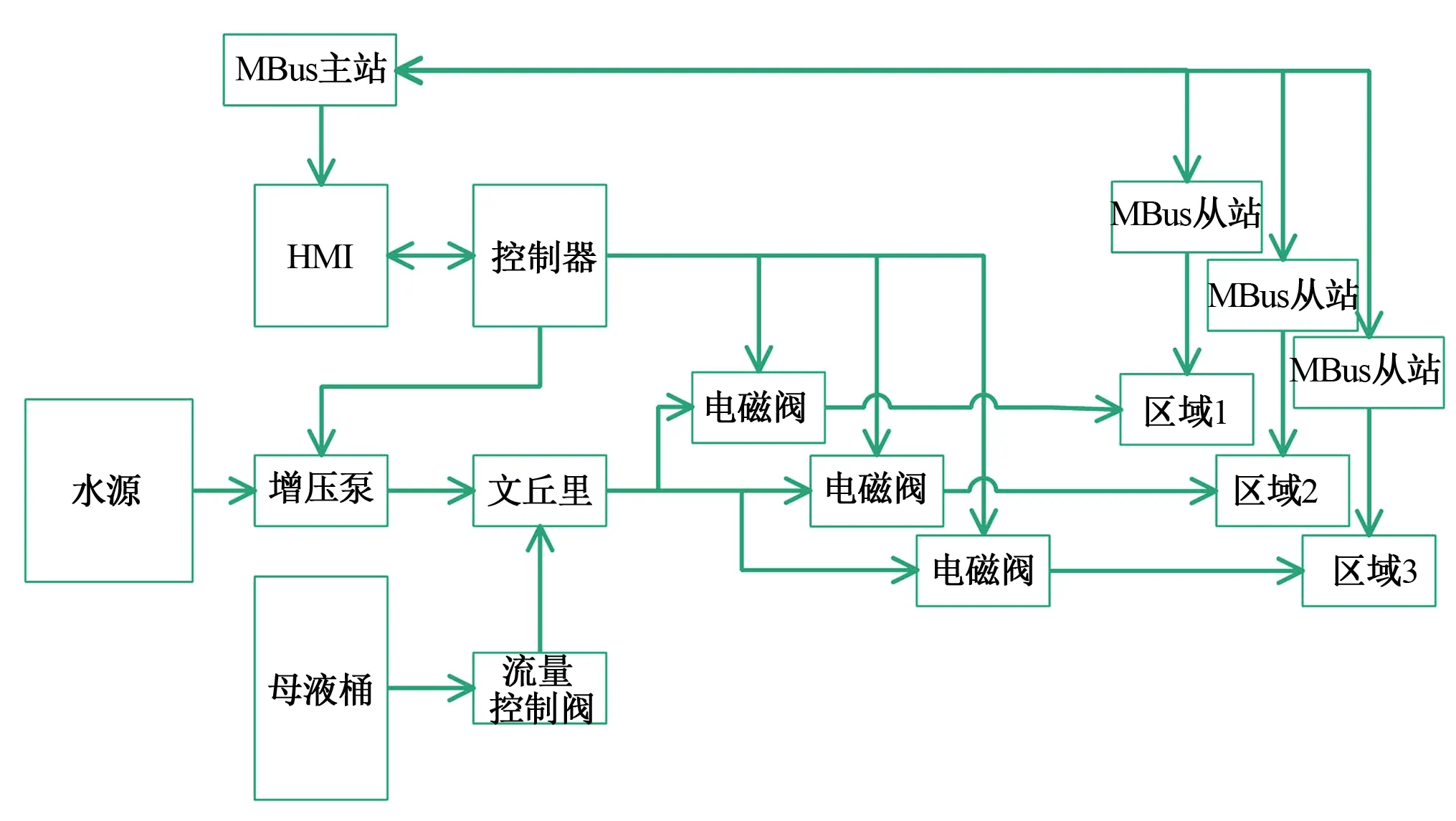
图2 施肥机架构与组成
选择三菱公司的Fx3G作为控制器,接口丰富,扩展功能强,易于通过安装IO模块增加输入输出能力。威纶通公司生产的HMI以可靠稳定、支持通信协议广泛而闻名,能够通过简单的配置和PLC通讯,故选择该公司的MT8102iP作为HMI。
本系统施肥机的工作原理是:PLC接收用户的设定,按时开启增压泵,利用文丘里效应,母液桶中的浓缩母液经过流量控制阀进入到文丘里中,经混合后,制成特定比例的工作液。控制器通过对施肥管路中不同区域电磁阀的开闭,实现对不同区域的施肥作业。为了简化设备的复杂度,提高可靠性,本设备取消了母液的自动化配置,采用手动调节流量控制阀,来控制不同的营养液浓度。
电磁阀的安装靠近施肥机,便于供电和控制。MBus主站安装在施肥机控制配电板上,与HMI连线通讯,MBus供电直接从配电板取得。
在施肥区域安装MBus从站,其中从站的硬件设计见图3[14]。

图3 MBus从站硬件设计
从站用于采集施肥区域的环境参数,反馈给控制器。因为MBus模块的特性,单片机可以直接从MBus总线获取所需的电能,解除了用电的限制,在单片机的程序上可以增加传感器的采样频率,提高对施肥区域环境参数变化的响应速度。使用铜康铜热电偶,安装在土壤下5 cm,用于采集土壤的温度数据。土壤湿度传感器利用电极测量土壤的电阻率,测量结果为电压输出型,输出范围为0~3.7 V,使用MCU的ADC模块将电压值转化为土壤相对含水量。
主站部分,如果使用Fx3G的扩展板增加一个串行通信接口,那么会导致整个设备的成本增加,本设计充分利用威纶通HMI多出来的DB9接口,使用Free Protocol通信协议,在威纶通的宏命令中使用INPORT和OUTPORT函数,自行定义数据帧的格式,具体格式见表1。主站和从站的数据帧均遵守MBus仪表总线协议。采集的数据存储在人机交互界面中,每5 min保存一次记录。同时约定从站应答的数据格式,见表2。

表1 MBus数据帧格式

表2 从站应答帧中DATA部分格式
2.2 系统控制流程
主站部分,设置HMI的COM2接口使用Free Protocol协议,编写宏程序。当机器开机以后,主站以10 s为一个周期向从站发送查询帧,向从站轮询采集的环境参数。接收到从站返回的数据帧后,对从站发回的数据进行解析,存放在HMI的寄存器中。HMI根据区域的环境参数与设定值进行比较,将控制指令下发给PLC,进而控制对应区域电磁阀的开闭。主站查询与控制流程图见图4。
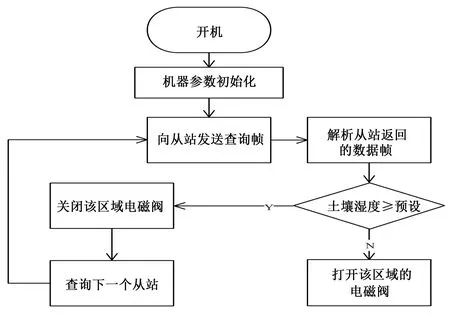
图4 主站查询与控制流程图
从站在UART的中断中侦听主站的查询请求,一旦MBus从站模块获取到询问帧,从站则进入UART中断服务,将从站连接的传感器数据组装后,按照MBus协议的要求递交给MBus从站模块,然后数据发送到主站中。从站中断工作流程图见图5。
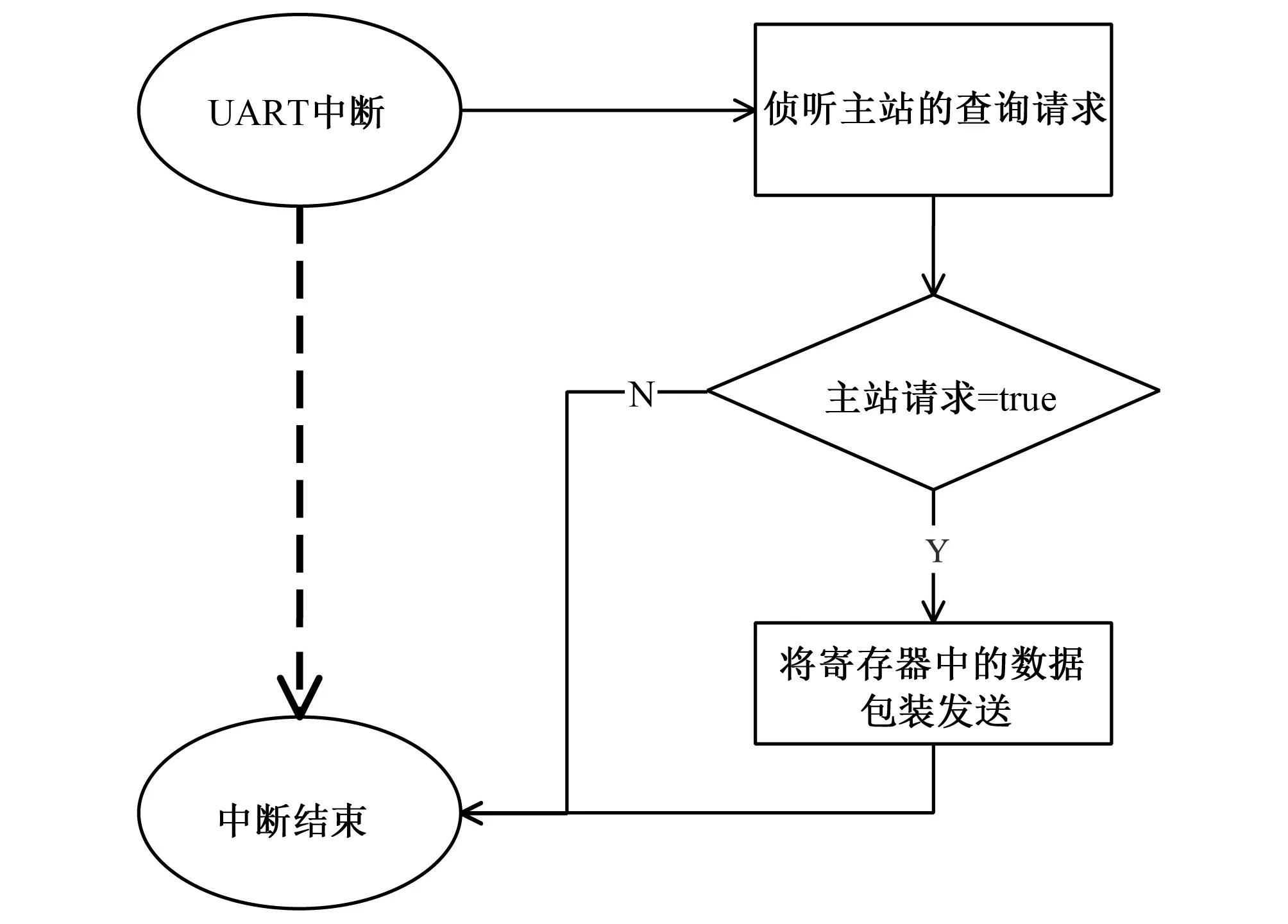
图5 从站中断工作流程图
从站使用STM32F1x芯片的TIM,定期对传感器进行数据的采集,由于DHT11自身已经对数据进行了处理,故每次直接读取该传感器的数据作为最新值。
(1)
式中:x为最新的采样值;yi为更新前的数值;yi+1为更新后的值。
铜康铜热电偶、土壤湿度传感器的数据有一定的波动,为了减少波动对数据的影响,使用式(1)更新地温数值。
3 试验验证
3.1 试验方案
试验在江苏农博园的连栋塑料温室中进行,对机器进行两种工作模式下的验证。实验实际采用的是一主一从的方式,A组试验和B组试验交替进行,两组试验间隔4 h。
A组实验,使用基于MBus通讯的传感器采集区域的湿度情况。对比土壤湿度阈值,决定电磁阀的通断。具体策略见式(2)。
(2)
式中:yi为i区域采集回来的湿度值;t为湿度设定的阈值,上下浮动10%,作为模糊区间,不作控制;YV为电磁阀,YV=on表示电磁阀开启,YV=off表示电磁阀关闭。
实验每次2 h,记录土壤相对含水量。
B组实验,在HMI上写排程,用于定时控制PLC开启电磁阀。设定形式为每半小时开启电磁阀5 min,试验同样进行2 h,记录土壤相对含水量。
使用土壤相对含水量表示土壤湿度,即土壤含水量占该土壤田间持水量的百分比,见下式。

(3)
在从站部分使用了片上自带的ADC模块,该模块为12位逐次逼近型,可以将电压、电流等模拟量信号转化为0~4 096之间的数值。为了建立土壤相对含水量与传感器数值之间的关系,需要对土壤含水量与ADC输出数值进行标定。采集温室内土壤,进行3次重复试验,取平均值作回归方程。标定结果如图6所示。

图6 土壤含水量与ADC读值标定曲线
实验结果的均匀性使用Christiansen计算法计算,见下式。
(4)
式中:ci为第i个采样;n为样本容量;Cu为样本点的均匀性值。
实验结果与设定的相符程度用平均误差平方和来描述,值越小,那么实验结果和设定值越相符。
(5)
式中:s为系统设置的湿度阈值;ci为所采的样本;n为样本容量;Qc-s为平均误差平方和。
3.2 结果与分析
实验对2 h内的变化进行了细致的记录,数据为3次实验结果的算术平均值。对A组实验,湿度设定阈值为70%。B组实验设计为每经过30 min,打开电磁阀灌溉5 min。两组实验下相对土壤含水量见图7。
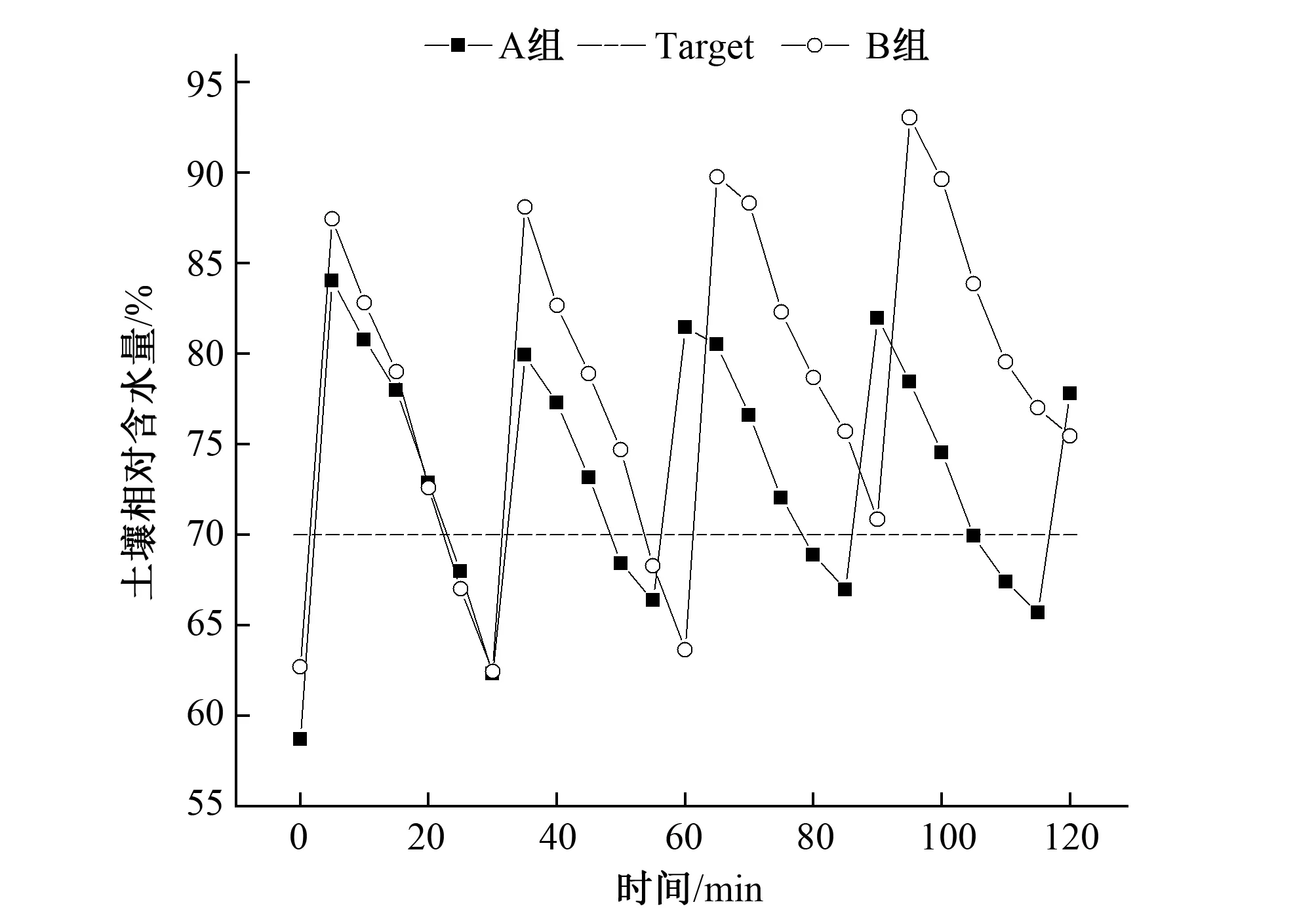
图7 两组实验下土壤相对含水量
从图7可以看出,两种模式下,土壤的相对含水量都呈现锯齿状变化,分别在打开电磁阀灌溉后约5 min,土壤相对含水量达到峰值,之后缓慢下降,最终在25 min后,湿度下降到低于设定值。B组实验,采用的是定时灌溉模式,土壤相对含水量上升的时机比较一致,灌溉5 min的设计能够满足70%的土壤相对含水量设计指标,但是土壤相对含水量有不断增高的趋势。
A组实验,每当达到土壤相对含水量下阈值的时候,则开启电磁阀进行灌溉,一直到相对含水量达到上阈值,则关闭电磁阀。对比B组的试验结果,可以看出,A组实验虽然也呈现出锯齿状的土壤相对含水量变化,但变化范围始终围绕在设定值附近。B组实验采用定时灌溉的策略,随着时间的增加,土壤相对含水量实际处于一个逐渐升高的状态中,稳定性不如A组实验。Christiansen计算法的结果也印证了这个观察,其中A组实验的均匀系数为92.157 3%,B组实验的均匀性系数为90.837 5%。
当对比两种方式与设定值的相符程度时,A组平均误差平方和为54.892,B组为142.929,B组显著高于A组,说明A组更加接近设定值,与实验数据相符。
4 结 语
基于MBus的施肥机传感器监测系统,通过Mbus技术将传感器直接与施肥机控制设备相连,有效解决了定时方式的传统施肥机无法精确对水肥施用控制的问题。与传统的定时控制相比,使用从站节点获取区域的环境参数能够实现更加准确的施肥控制,避免水肥的浪费,具有良好的研究推广价值。
本系统仅是MBus技术与施肥机相结合的初步探索,实验时间有限,两种技术的结合还有很多方面可以挖掘,如何提高施肥的准确性,提高MBus从站节点的数量,在新的技术融合下,改进施肥机的控制算法仍有待进一步验证。
猜你喜欢
农业工程学报(2022年1期)2022-03-25 01:13:24
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29 09:13:56
自动化学报(2019年12期)2020-01-19 05:18:14
电子制作(2019年7期)2019-04-25 13:17:10
电子测试(2018年4期)2018-05-09 07:27:32
电子设计工程(2017年20期)2017-02-10 03:39:04
电子制作(2017年23期)2017-02-02 07:17:07
江苏农机化(2015年6期)2015-12-07 11:58:18
农村百事通(2015年10期)2015-07-27 10:09:06
电测与仪表(2014年18期)2014-04-04 12:33:08