
风电变流器并联控制的环流抑制策略研究
2019-11-21 05:37江宏玲戴新荣
安庆师范大学学报(自然科学版) 2019年4期
周 成,江宏玲,戴新荣,谢 芳
(1.安徽国际商务职业学院信息工程学院,安徽合肥231131;2.安徽省(水利部淮河水利委员会)水利科学研究院,安徽合肥230088;3.安徽省建筑工程质量监督检测站,安徽合肥230088;4.安徽大学工业节电与电能质量控制协同创新中心,安徽合肥230601)
随着风电装机容量的不断加大,对大功率风电变流器的需求日益突出。大功率风电变流器一般可由较小功率的风电变流器并联得到。环流的存在导致绝缘栅双极型晶体管(IGBT)电流不均,使得IGBT功率器件的电流应力不平衡,这导致IGBT功率器件长期处于严重的热状态,最终导致IGBT器件烧毁[1-3]。因此,在并联控制时如果不处理好环流问题,会降低系统的控制性能和发电效率,甚至造成系统不可恢复性崩溃,给用户带来巨大损失[4-5]。如何解决好环流问题成为变流器并联的核心问题。国内外学者对变流器的并联控制进行了相关的研究,文献[1]提出了一种利用电抗器和减小零序电流控制算法来抑制动态环流,控制效果较好,但算法较复杂。文献[2]提出了一种主从式的变流器并联控制方案,并联系统能稳定运行,但效率不高。文献[3-6]分别给出了零序环流的控制算法、脉宽调制波重构算法等控制算法,在很多变流器控制中得到了应用,但算法复杂、成本较高。基于以上研究存在的问题,在分析多种变流器控制技术的基础上,针对大功率变流器并联控制,本课题组提出网侧和机侧独立控制环流抑制策略。
1 环流等效数学模型
图1所示为实际工程应用中普遍采用的两台变流器共直流侧并联拓扑图,变流器并联控制必然带来如图1所示的环流问题。
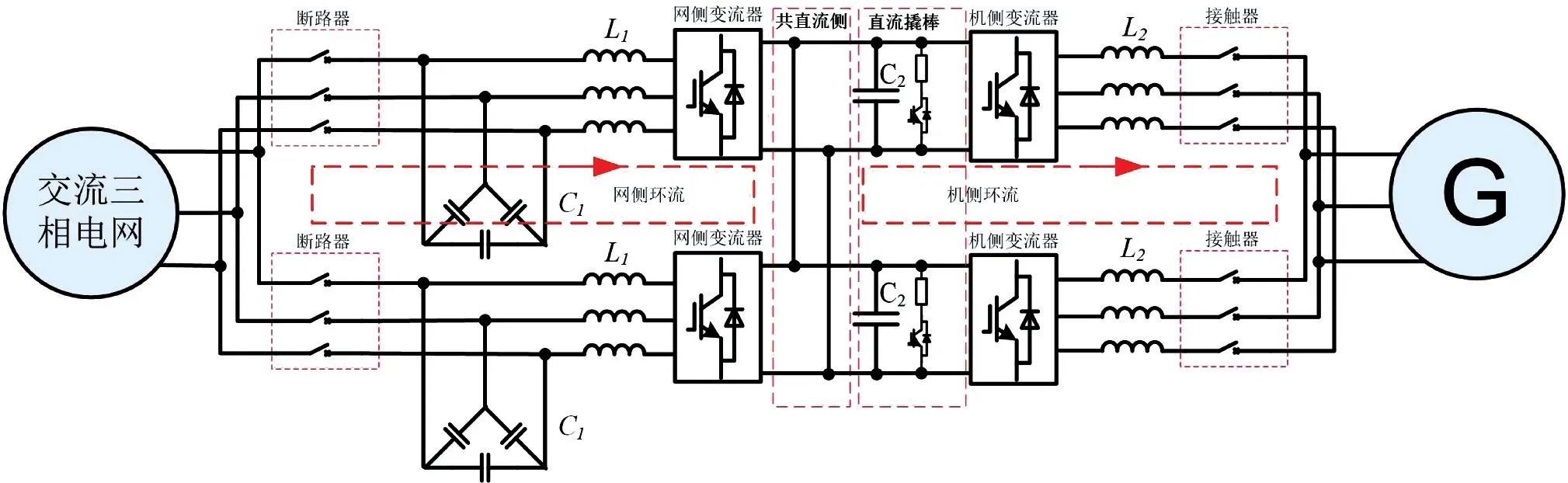
图1 变流器并联时的环流
为了对两台变流器共直流侧并联系统进行环流分析,对图1所示的机侧与网侧拓扑电路做等效数学模型的推导,得到并联系统的等效平均模型。使用坐标变换,每个相桥臂的数学模型等效到同步旋转坐标系[7-8],如图2所示。图2中各变量的下标g、σ分别代表机侧和网侧变量,下标1、2分别代表机侧或网侧的两个变流器,下标d、q、z分别代表d轴、q轴、z轴(零轴)分量。eσz、egz分别为网、机侧电势的z轴(零轴)分量,ωσ为电网同步角速度、ωg为电机同步角速度,R为每相线路电阻(含电感电阻),d为变流器三相桥臂的占空比分量,i为环流。
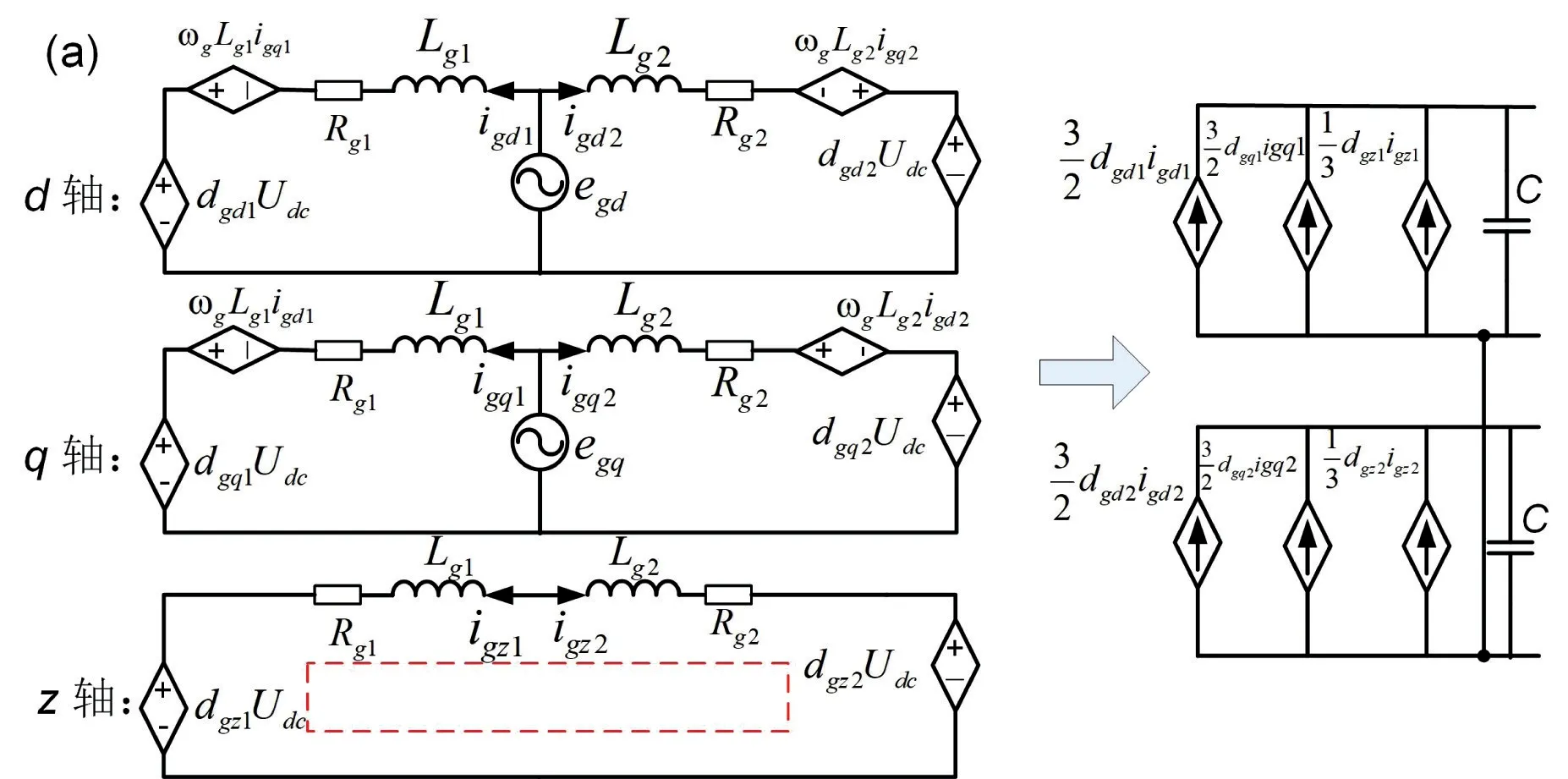
图2 (a) 并联系统机侧平均模型
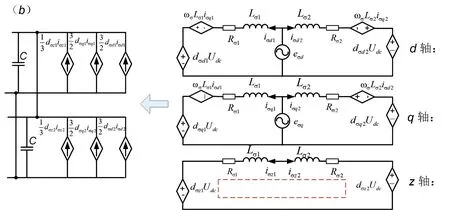
图2 (b) 并联系统网侧平均模型
由图2所示的并联系统平均模型可知,机、网侧的环流是相互独立的。以机侧环流为例(网侧环流类似),两机侧变流器的各桥臂占空比Z轴分量不等(dgz1≠dgz2)是造成环流的主要原因,要控制环流需要调节dgz1或dgz2即可[9-10]。图2所示的机、网侧环流表达式为

2 两种环流抑制策略
由上文分析可知,并联变流器机、网测的环流相互独立并且环流产生的主要原因是两机侧或网侧变流器的三相桥臂占空比的零轴分量或。在进行环流抑制时可对机、网侧进行分开设计,以机侧环流抑制为例(网侧可类似得到)有如图3(a)和图3(b)两种环流抑制策略。
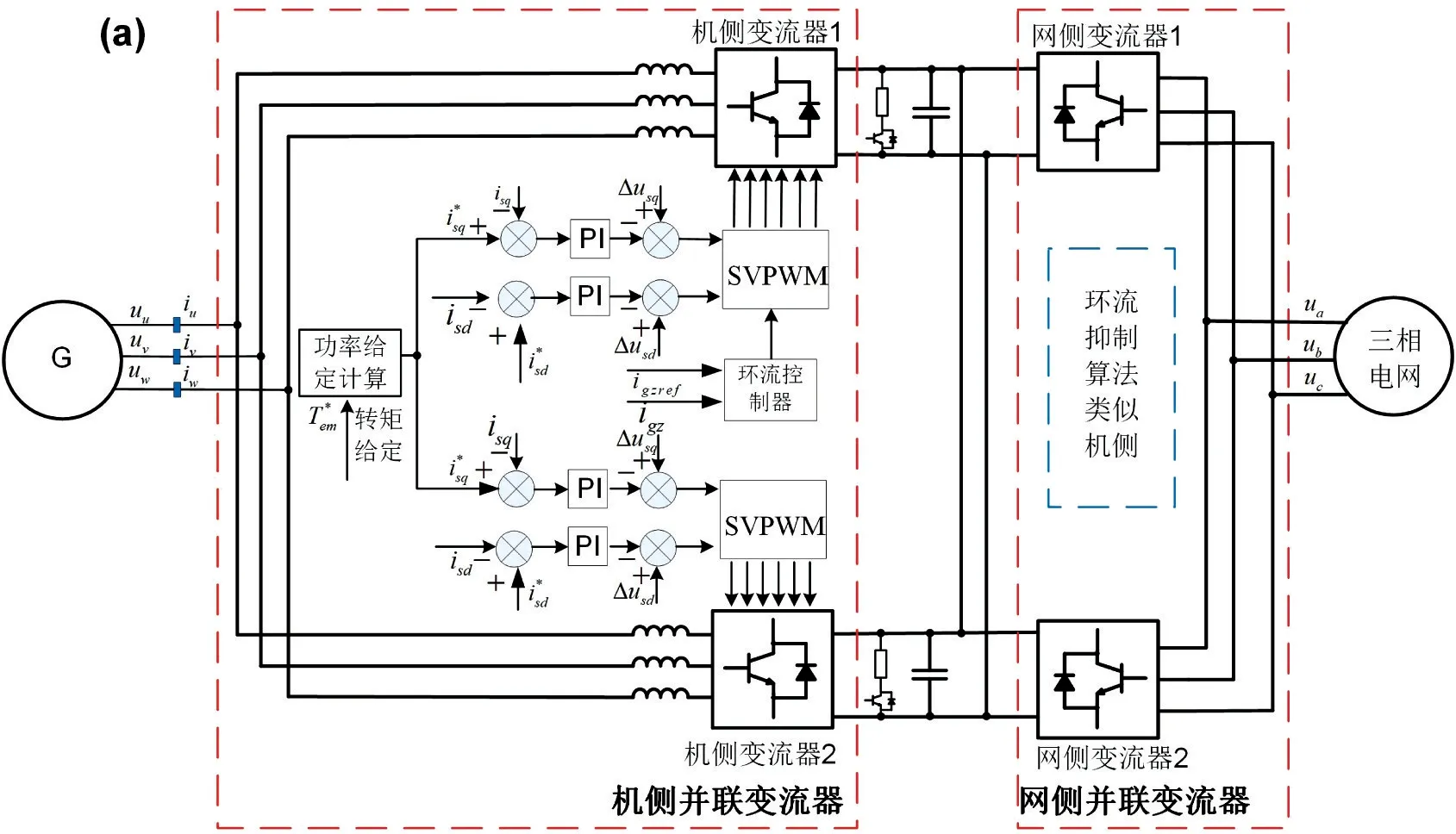
图3 (a) 机侧变流器分开控制策略
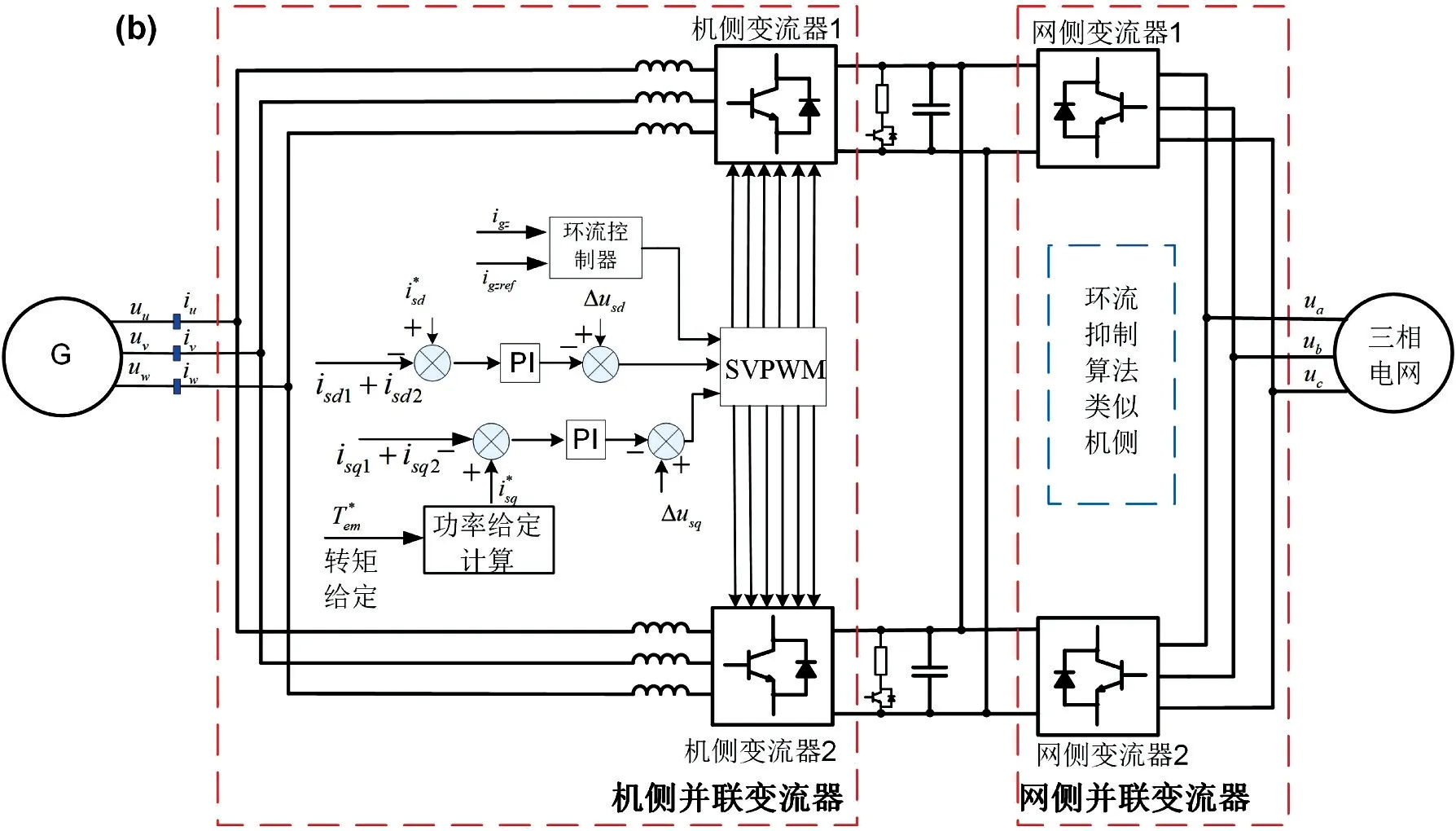
图3(b) 机侧变流器统一控制策略
图3 (a)所示的环流抑制方法是:忽略机侧变流器的并联上、下桥臂PWM 驱动信号的不一致问题。在机侧变流器1的控制中加入零序电流控制,设计环流抑制器只抑制机侧变流器1的环流,机器变流器2的环流自然得到抑制。使用电流传感器测得机侧变流器的三相电流并算出Z轴(零轴)电流信号(给定值为0)作为反馈信号送入环流抑制器,经PI调节器作为环流抑制器的输出再分送补偿到三相桥臂占空比零矢量上来调整零轴分量dgz1,从而实现环流的抑制。为了得到较理想的环流抑制效果对并联上、下管的PWM驱动信号的一致性要求较高,但这种控制策略实际上是机侧变流器1和2各采用一套电流环控制,并联上、下管的PWM驱动信号分别由各自电流环输出控制。如图4所示,当两套电流环控制输出的PWM驱动信号不一致、A桥臂的上管A1导通时,A桥臂的下管A4可能导通,这样电流会从直流母线的正极经过A1和A4再流入直流母线的负极形成桥臂间环流。
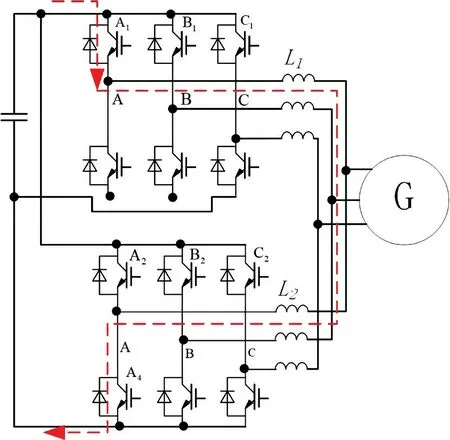
图4 桥臂之间环流
图3 (b)所示环流抑制方法是:考虑如图4所示的并联上、下管的PWM驱动信号的一致性。采用机侧两个变流器用一个DSP控制(网侧类似),也就是机侧并联采用一个电流环控制。该控制策略通过将电流传感器检测到的两个变流器的三相电流之和送入PI调节器的反馈端,电流环的给定由转矩控制算法得到,通过一个电流环调节后输出信号经过SVPWM来控制两并联变流器的开通和关断。在并联侧采用同一个载波和同一个调制信号,避免了图3(a)所示控制策略的上、下桥臂PWM驱动信号的不一致问题,从而达到抑制桥臂环流的目的。
3 仿真与实验
系统仿真参数为网侧滤波参数L=0.6 mH、C=160 uF,且给定无功电流均为400 A。仿真波形如图5所示,图5(a)所示为未加环流抑制的波形,可以看出两并联输出的电流不一致;图5(b)所示为加入环流抑制后的电流波形,可以看到电流波形基本重合,环流减小。
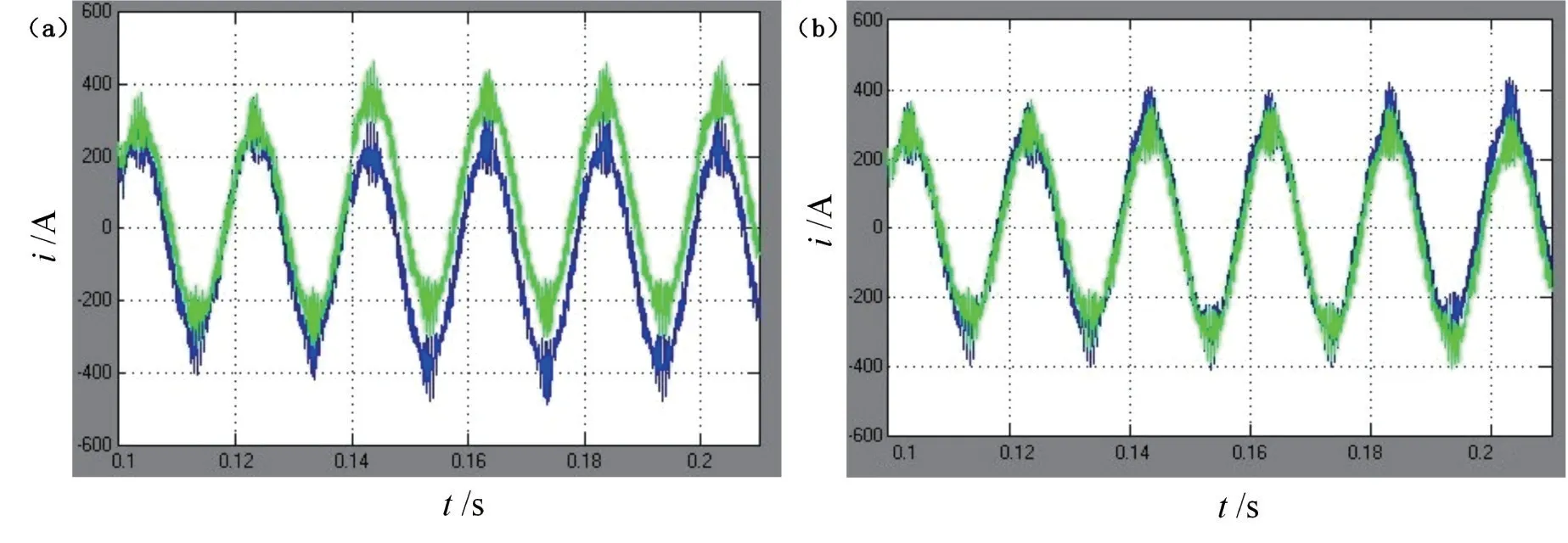
图5 环流抑制策略仿真。(a)加环流抑制的波形;(b)加环流抑制的波形
基于上述仿真,搭建了小功率实验平台开展控制方案的相关实验验证。实验平台的系统框图如图6所示。DSP2808主要用于电压、电流等信号采样和算法处理等,FPGAEP2C8主要用于调节占空比和系统故障处理等。变流器逆变桥采用英飞凌公司的FF100R12RT4 搭建,其电流和电压等级为100 A 和1 200 V。
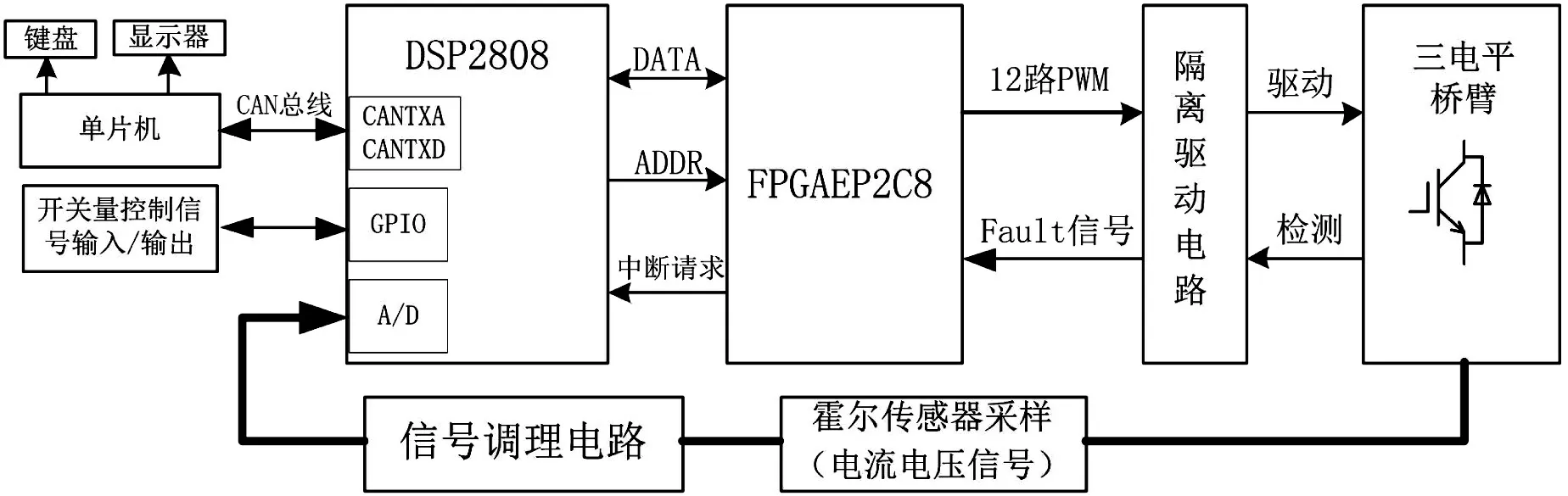
图6 实验平台控制结构框图
当给定电流一致且交流侧接入的电感较大时,采用图3所示的两种控制策略均能获得如图7所示的基本没有环流的良好控制效果。
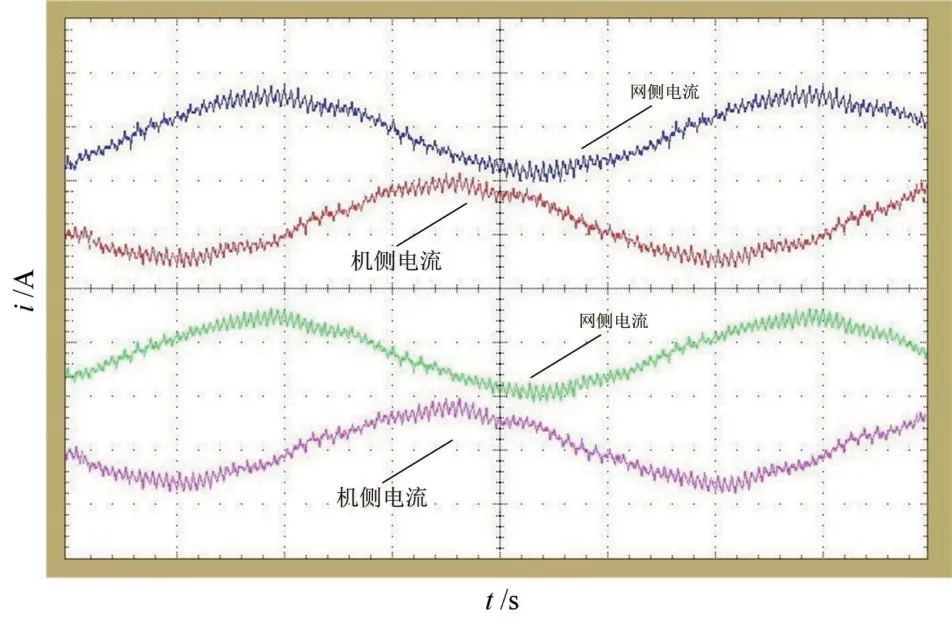
图7 参数相同时电流波形
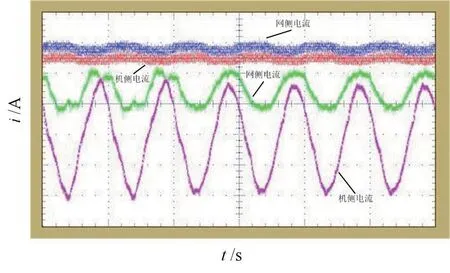
图8 给定电流不一致时电流波形
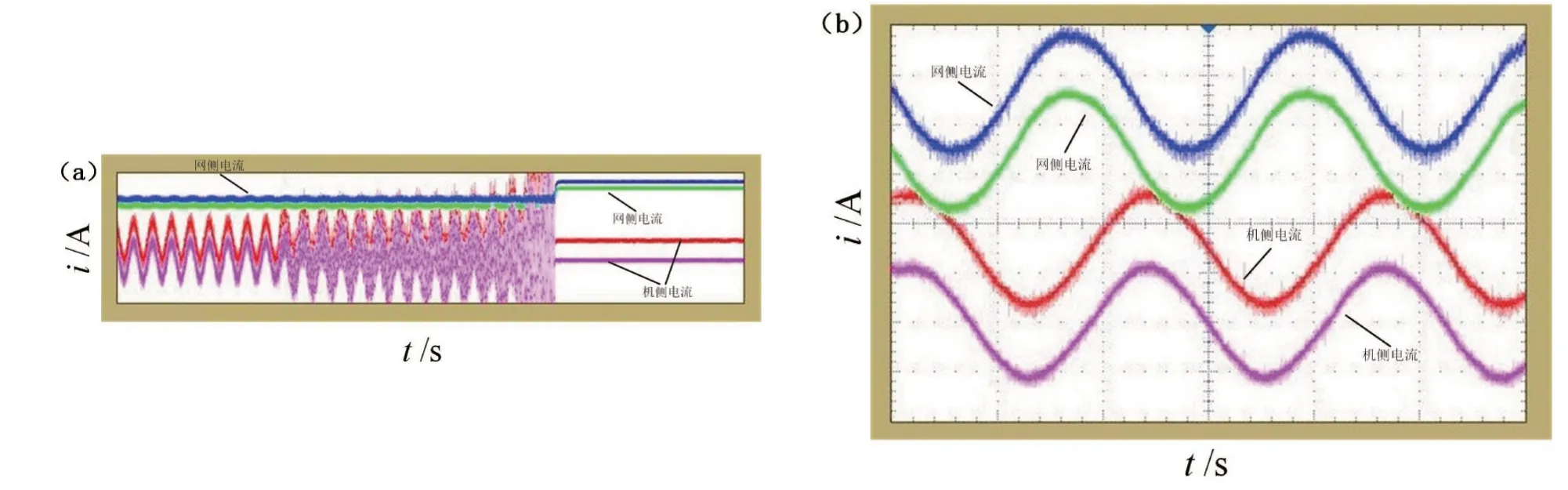
图9 滤波电感很小时两种控制策略电流波形。(a)图3(a)控制策略电流波形;(b)图3(b)控制策略电流波形
当给定电流不一致且交流侧接入的电感较大时,采用图3(a)所示的控制策略得到图8所示电流波形,实验波形表明,在加入环流抑制后波形有所改善,环流抑制控制有一定的效果。但是当机侧和网侧接入0.02 mH的小电感时,则并联会产生较大的环流,图3(a)所示的控制策略会使变流器产生如图9(a)所示的系统过流保护,系统工作性能很差,甚至导致变流器系统停机。而采用图3(b)所示的控制策略则可以正常并网运行并且基本没有环流,电流波形如图9(b)所示。因此,实际的变流器中机侧的电感通常都较小,为了得到良好的环流抑制和控制效果应选择图3(b)控制策略。
4 结 论
综上所述理论分析和仿真实验验证了环流抑制策略的可行性,结论主要为并联变流器各桥臂占空比z轴分量不等(dgz1≠dgz2或dσz1≠dσz2)是造成环流和电流波形畸变的主因。共直流侧并联时机/网侧环流互相独立,两侧抑制方案可分开设计。当滤波电感参数很小时采用第二种控制策略可确保稳定运行并取得较好的环流抑制效果和良好的控制性能。
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
中风与神经疾病杂志(2021年10期)2021-01-03
电子制作(2019年10期)2019-06-17
通信电源技术(2018年5期)2018-08-23
中国实用神经疾病杂志(2018年9期)2018-05-25
工矿自动化(2016年10期)2016-10-28
儿童故事画报·智力大王(2016年6期)2016-09-14
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
