
基于LoRa的小龙虾生态养殖监控系统设计与实现
2019-11-13 05:31宋晓霞
渔业现代化 2019年5期
宋晓霞,陈 明,池 涛
(1 上海海洋大学信息学院,上海 201306;2 农业农村部渔业信息重点实验室,上海 201306)
20世纪末以来,长江三角洲一带开始大量食用小龙虾并加工出口,推动了小龙虾养殖业的发展。但是在大多数的养殖场中,饲养员还是凭借对小龙虾生物学特性的了解来养殖,忽略了小龙虾精细的养殖过程管理,小龙虾长期处在低氧、水质恶化的环境下会严重影响发育、生长,进而影响产量和品质。小龙虾养殖的首要问题是水质环境的好坏,水质环境目前还较难实现有效控制,是养殖风险的最大来源[1-2]。随着社会经济的不断进步,“绿色生态”的理念得到了高度重视,传统的人工水产养殖方式逐渐被新型的生态养殖模式所替代,生态健康高效的养殖模式更加有利于水生生物的生长[3-6]。
随着现代农业产业化、规范化、立体化的推进,物联网技术已慢慢渗入到渔业水产领域[7]。如基于ZigBee无线传输网络的水产养殖环境监测系统[8-9];采用WiFi网状组网配置方法设计基于物联网和地理信息系统的水产养殖测控系统[10];根据ZigBee和GSM的优势开发防盗报警系统等[11]。目前在控制系统中大多使用的通信技术为ZigBee、WiFi、GSM等无线技术[12-14],虽然解决了布线困难、供电不方便的问题,但是ZigBee传输距离短,传输速度慢,适合小范围组网;WiFi功耗高,组网能力低;GSM信号差且造价较高。这些无线技术都无法满足环境复杂、覆盖面积广的渔业监控系统。
本研究选择新兴的LoRa技术[15],设计了一种绿色生态养殖模式,将循环水式生态养殖技术与“稻、草、虾”式共生养殖技术相结合,构建零排放多级水质生态调控系统。结合现代水产物联网技术、智能化控制技术、生物技术和生态调节技术,提出一种基于LoRa的“感知-决策-控制”的闭环生态智能控制系统。
1 “稻、草、虾”混合生态多级调控养殖模式
“稻、草、虾”混合生态调控模式是根据水稻、伊乐藻(一种耐低温水草)、小龙虾共生互利的特点,在一定的养殖区域内,依据养殖生物间的互补共生共存原理,运用生态调控技术,改善养殖环境和养殖模式,为养殖生物提供最适宜的环境,实现生态平衡的同时又能提高养殖效益的一种绿色生态养殖模式[16]。
本系统采用4级处理模式(图1)。第1级:从周边水系引水到进水渠,通过种植苦草并投放螺蛳进行沉淀和生物处理;第2级:将第1级处理水体引入到种植水草的蓄水池中,通过水草的净化能力及其光合作用使水体溶氧量大幅提升,水体中氨氮、亚硝酸盐氮等各项指标大幅度降低并且确保水体pH稳定在7.5~8.5,然后再引入大棚虾池;第3级:根据设施养殖车间的生态情况,构建稻、草、虾的共生生态环境。在4—9月采取种植水稻的方式,水稻在生长过程中为小龙虾提供了隐蔽场所,并为其提供大量的昆虫幼体作为饵料,小龙虾摄食饵料之后,残饵降解到水体中形成氮、磷以及微量元素,可以为水稻提供一些营养元素。在当年10月至翌年3月采取种植伊乐藻的方式,在光合作用过程中释放大量的氧气,同时吸收大量的有害氨氮、二氧化碳等和一些有机分解物质,能够稳定水体pH,提高透明度;第4级:通过设施养殖系统将养殖水体经检测后再返回到进水渠进行循环处理,循环使用,达到养殖水体零排放的要求。
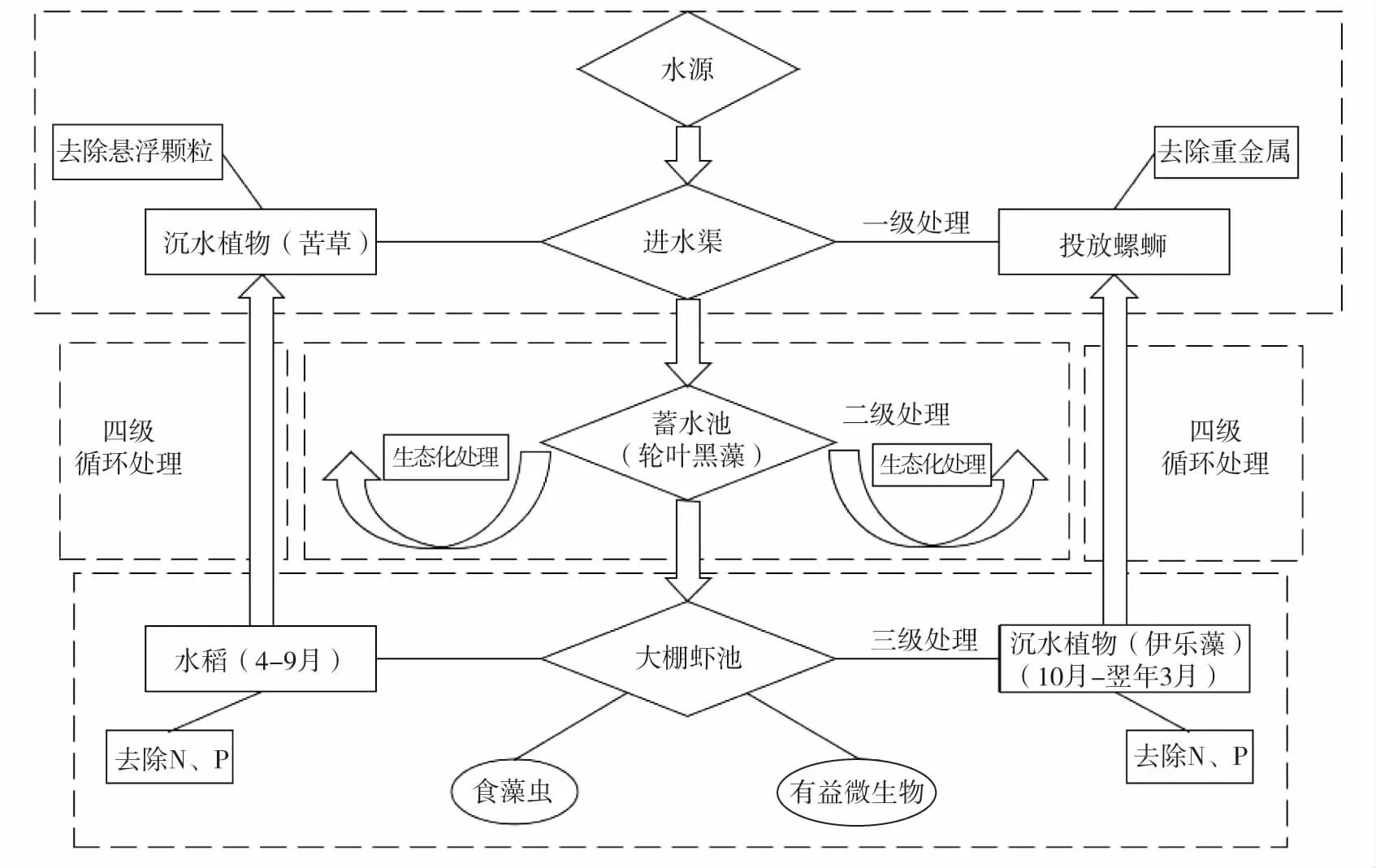
图1 “稻、草、虾”混合生态多级调控养殖模式示意图
在小龙虾养殖过程中,养殖水环境为小龙虾及其他生物提供食物、生存环境和氧气。由于人类活动、农业生产等原因,导致养殖水体的水温、pH等参数发生了变化,影响小龙虾及其他生物的生长。根据小龙虾养殖的环境需求,本系统中选取的水质评判参数主要为5种:pH、溶氧、氨氮、水温和亚硝酸盐氮[17-18]。
2 监控系统总体架构
小龙虾生态养殖监控系统主要由现场智能硬件模块、云服务器、可视化软件3个部分组成(图2)。其中智能硬件模块由LoRa传感器子节点、LoRa网关、4G路由器、PLC控制柜构成。在本系统中通信距离至少达到2 km,且环境复杂,因此采用高性能超低功耗STM32L1处理器和SX1278无线射频收发模块,两者具有低功耗、抗干扰性强,通信距离远等优点。LoRa通信网络采用星形的网络拓扑结构,传感器子节点通过RS485方式采集不同传感器收集的pH、溶氧、氨氮、水温和亚硝酸盐氮等信息,通过子节点与汇聚节点的LoRa芯片将节点和LoRa网关进行有效组网。汇聚节点与服务器之间的通信采用4G网络方式,为现场端设备与云服务器提供通信链路;同时为了实现远程监控路由器,通过4G网络与云服务器共同搭建VPN,实现异地访问管理。在本系统中,选用模糊控制作为控制算法,实现系统的自动调节;选用LabVIEW软件为开发平台;选择开源、免费的MySQL存储养殖水域环境参数。
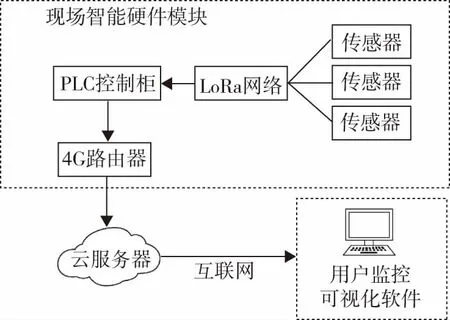
图2 系统总体框架
3 系统设计
所设计的小龙虾生态养殖监控系统终端主要由传感设备、电源模块、数据处理模块和无线传输模块组成。电源模块采用高能锂电池与太阳能供电相结合的方式。数据处理模块采用以ARM Cortex-M3为内核的STM32L1处理器[19],具有高性能、低成本的优势。无线传输模块采用SX1278射频芯片,这是一款高性能、低功耗、远距离的低功率无线模块,其灵敏度可达-148 dBm,最大链路预算可达168 dB。
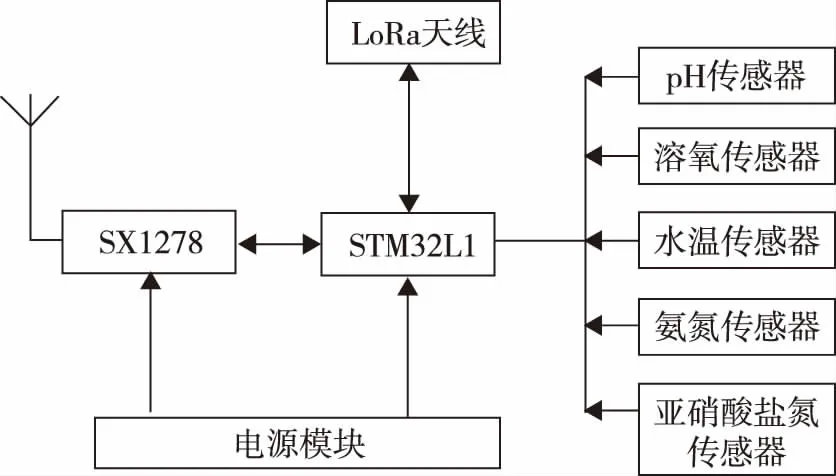
图3 硬件原理框图
传感器子节点的主要任务是收到汇聚节点发来的采集命令之后,通过485总线采集不同传感器的水质信息。当没有收到采集命令时,通常处理模块STM32和传输模块1278均处于待机状态。当 SX1278 LoRa模块收到汇聚节点发送的采集命令时,LoRa模块通过 SPI方式唤醒处理模块,处理模块解析指令后,打开传感器电源并通过 RS485总线给传感器发送所感知数据的读取指令;当处理模块收到水质数据后关闭传感器电源,同时将数据上传至汇聚节点,然后子节点系统再次进入待机状态,等待下一个数据读取周期。硬件原理框图和现场实物如图3、图4所示。

图4 现场实景图
4 集控中心软件设计
4.1 上位机与PLC通信
上位机监控软件采用NI公司开发的一款虚拟软件LabVIEW进行设计,控制柜的网络通讯主要依靠发送一个FINS的指令集来实现以太网数据通信[20]。FINS(Factory Interface Network Service)通信协议是欧姆龙公司开发用于工厂自动化控制网络的指令/响应系统,FINS指令发送之后,上位机就能够自动读和写PLC数据区中的数据和控制器的运行状态。上位机与OMRON PLC通信如图5所示。

图5 上位机与PLC通过以太网通信
以太网通信单元可以通过UDP/IP或TCP/IP两个端口直接提供整个FINS数据通信命令服务。本文通讯采用FINS/UDP模式,其中在网络层远程通信设备终端使用的地址是IP地址,而在终端应用程序层使用的地址是FINS节点地址。本地UDP的端口号在传输层进行定义,默认的端口号是9600。FINS/UDP数据包格式如图6所示。通过向以太网单元FINS/UDP端口直接发送一条包含整个FINS通信命令的外部数据缓存包,就可以读写PLC的内存管理数据或控制整个PLC的运行。

图6 FINS/UDP数据包格式
4.2 数据库设计
LabVIEW通过LabVIEW SQL Toolkit(又称LabVIEW Database Connectivity Toolset)工具包实现与数据库的通信[21]。此工具包只能运行管理数据库,数据库的创建需要通过第三方数据库来完成,本文选择 MySQL数据库。
LabVIEW数据库工具包基于ODBC技术[22],利用LabVIEW SQL Toolkit访问数据库最直接有效的方法就是利用ODBC驱动访问数据库,在使用ODBC API函数时,需要提供数据源名DSN(Data Source Name)才能连接到实际数据库。ODBC类似于通道接口,在数据库与应用程序之间建立连接入口通道,实现数据库通信。完成了整个数据源的创建后,LabVIEW SQL Toolkit工具包就可以使用此DSN访问与其关联的数据库。LabVIEW连接到数据库后,运行程序便可以将收集到的实时数据保存到新的数据库中。
4.3 终端应用
监控系统的界面需要满足直观性、友好性、交互性以方便管理员操作,主要包含以下功能:
(1)数据显示。将不同池塘中三参数和五参数传感器采集到的实时水质数据直观地显示在主界面上,方便饲养员了解当前池塘水质情况,以便作出正确的判断。
(2)数据存储。保证现场数据的可靠存储是实现智能控制的基础。对不同池塘每个时段不同水质数据的分类存储应便于饲养员查询和检索,亦可对小龙虾最佳生长环境更加了解。
(3)最佳溶氧量选择。管理员可以依据养殖经验和对小龙虾当前生长情况的判定,设置最佳溶氧量,系统则会自动形成基于模糊控制算法的最佳控制方案。
(4)环境调控方式选择。控制方式分为自动和手动开启。当显示的数据出现不合理时,管理员可以切换为手动控制增氧,默认情况下为自动控制。
(5)WEB界面发布。4G路由器与云服务器共同搭建VPN,为现场端设备与云服务器提供通信链路,再通过LabVIEW的Web技术发布程序前面板界面至浏览器,即可实现系统的远程监控。
5 模糊控制策略
在小龙虾养殖环境中,对池塘中溶氧量的控制尤为关键。由于本系统的被控对象存在较强的滞后性,传统的控制方法很难适应外部环境参数的变化。因此,本研究采用经典的模糊控制算法对水产养殖环境中的关键指标水体溶氧量进行控制,从而实现系统的智能化。模糊控制算法是以模糊集合论、模糊语言变量和模糊逻辑推理为基础,将系统化的理论与实际的人类专家的应用经验相结合移植于自动控制系统中的算法。模糊控制器主要由输入模糊化、模糊推理、反模糊化3个单元组成[23](图7)。
据经验,池塘的最佳溶氧量为5 mg/L左右。选取溶氧偏差e和溶氧偏差变化率ec为输入变量,溶氧u为输出变量,则对应的模糊化后的模糊变量分别为E、EC和U,且论域均为(-4,-3,-2,-1,0,1,2,3,4)。在本系统中,控制器的变量都采用5个模糊标记,简记为:{NM,NS,ZE,PS,PM},分别表示为:大、偏大、合适、偏小、小,通过隶属函数来定义这些相关的模糊子集。将偏差较大时模糊控制器要保证输出能够快速达到给定值,当偏差较小时输出量应该更加精确,保证系统能够准确检测到被控对象的变化。
该系统采用双输入单输出:IF x IS A AND y IS B,THEN z IS C。其中x,y为输入量,z为推理结果,A,B,C为模糊集,用隶属度函数表示(图8)。根据养殖人员的经验,制定出25条控制规则(表1)。根据表中的规则信息,利用取小取大模糊推理法得到结果模糊集,最后清晰化为实际值。
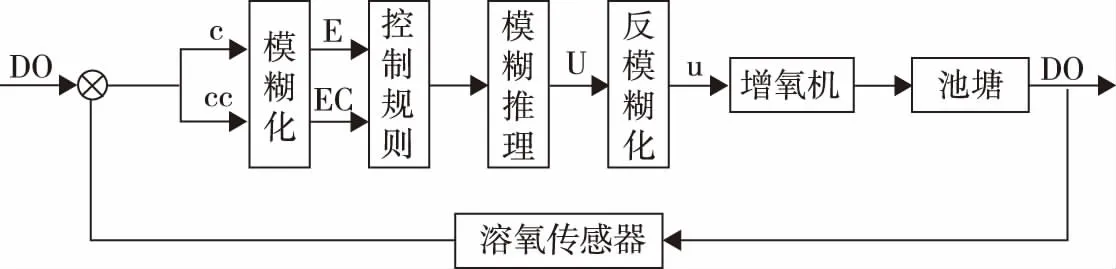
图7 溶氧模糊控制系统框图
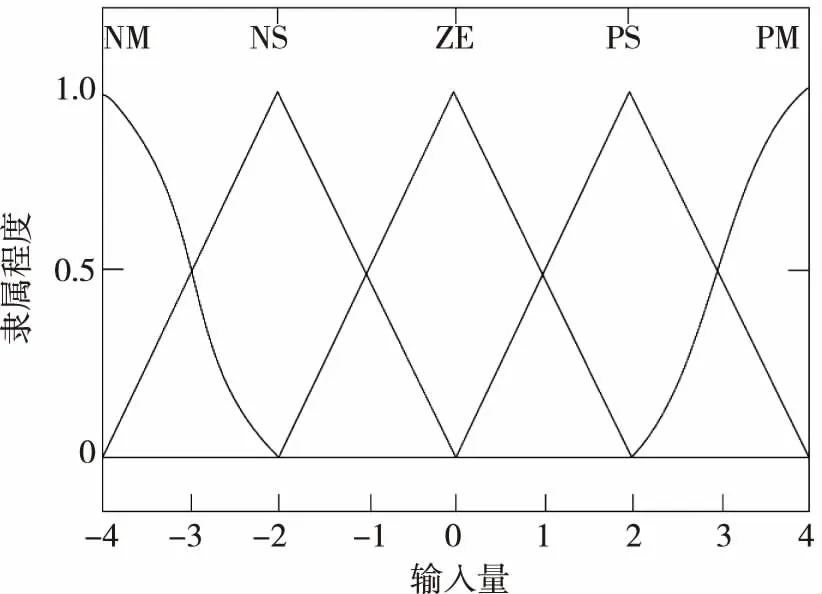
图8 隶属度函数
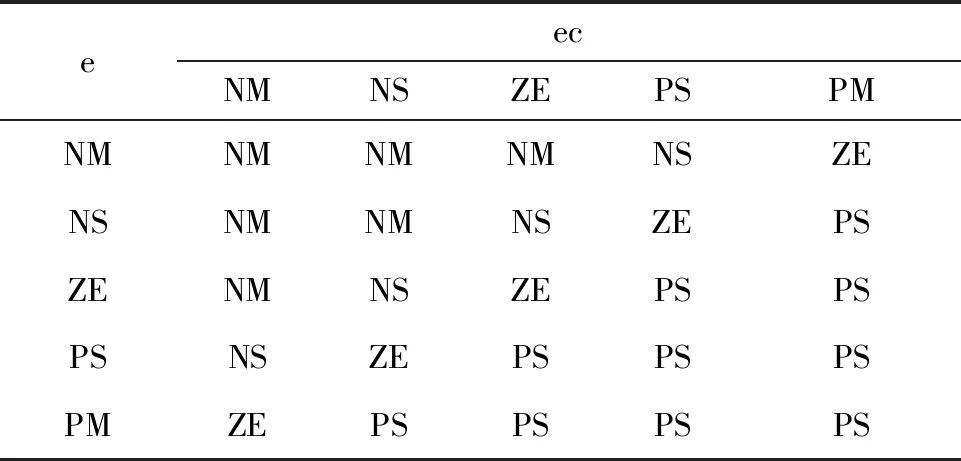
eecNMNSZEPSPMNMNMNMNMNSZENSNMNMNSZEPSZENMNSZEPSPSPSNSZEPSPSPSPMZEPSPSPSPS
在Matlab的Simulink工具中进行仿真得出模糊控制阶跃响应图如图9所示,幅值为5,时间为500 s。响应在达到并超过5 mg/L时,有一个很快的微调并稳定在5 mg/L左右。通过该图可以看出,系统比较稳定、精确,响应速度较快。

图9 模糊控制阶跃响应图
6 结果与分析
设备布置如图10所示。
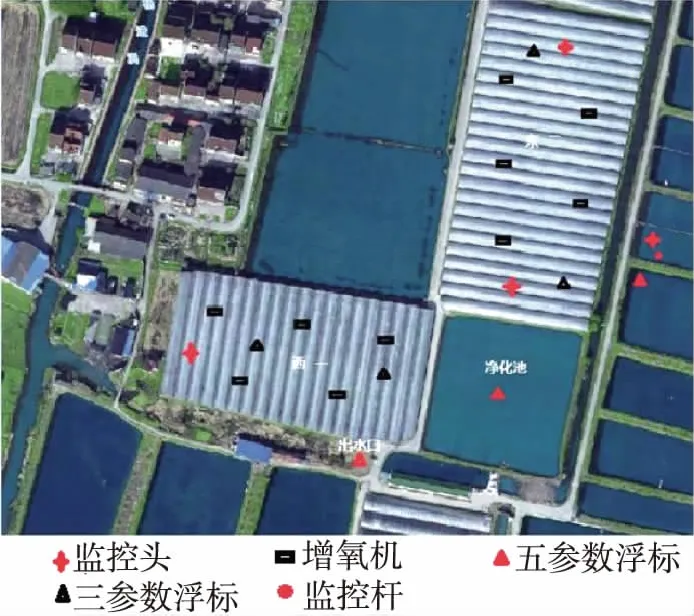
图10 池塘设备布放图
为验证系统的功能与可靠性,在上海金山区进行试验部署一个净化池塘,两个养殖池塘。养殖池塘选在通风向阳、环境安静、排灌方便、水质无污染的地方,池塘面积≥1.67 hm2,为稻田改造而成。建设时沿稻田田埂外缘向稻田内7~8 m处开挖环形沟,面积占30%左右。在每个养殖池塘中放置2个三参数浮标和若干台增氧机,出水口放置一个五参数浮标;在净化池塘中放置一个五参数浮标。
6.1 上位机测试
本系统开发了独立的上位机软件,显示中心运行正常,数据返回完整,显示内容简洁直观,该测试验证了系统的可行性。表2是2019年7月30日采集净化池中的部分数据。
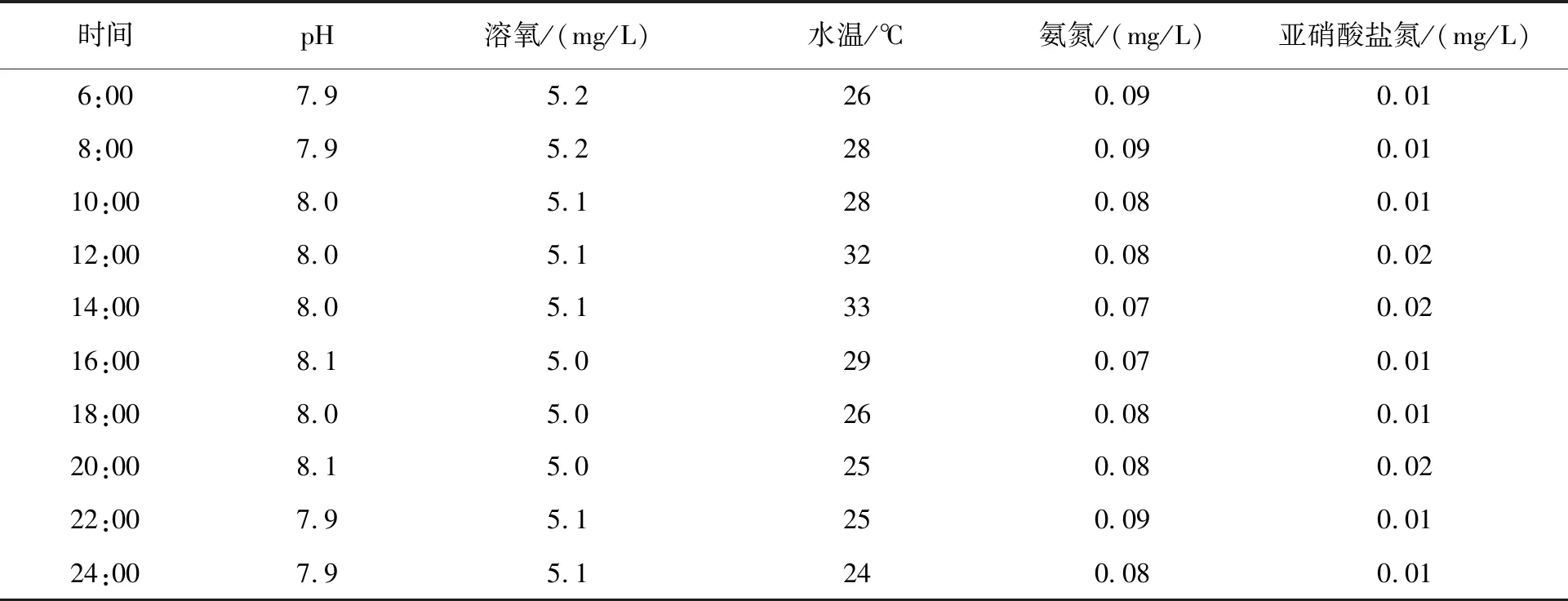
表2 净化池中水质测试数据
6.2 传输误差测试
水质参数采集系统主要完成对pH、溶氧、水温、氨氮、亚硝酸盐氮的采集,精准的水质参数采集直接影响小龙虾的生存环境。为了确保采集数据的准确性,选取2019年7月1日下午14:00净化池中五参数传感器的溶氧数据作为测试对象,将采集系统采集的信息和传感器读数进行对照试验,本研究将其与高精度溶氧仪(参考传感器)的采集数据进行对照(图11)。

图11 溶氧测试数据
比较传感器读数与上位机读数可知,两者的读数基本一致,误差控制在0.2 mg/L范围内,说明该系统传输可靠性较高,满足实际需求。
6.3 控制成功率测试
在自动控制系统关闭或者是自动控制效果不理想达不到养殖需求时,管理员可以选择手动控制。在10 d测试试验中,关闭自动控制功能,管理员每天手动控制10次,共计100次,应答反应95次,控制成功率为95%,其余时间均是自动控制且无故障,满足小龙虾养殖需求。
7 结论
针对小龙虾传统养殖过程中环境污染严重等问题建立生态养殖模型,并结合水产物联网技术,设计了一套基于生态调控和智能调控的小龙虾生态养殖监控系统。该系统上位机以LabVIEW设计监控软件,通过LoRa技术实现了水质数据信息的采集,根据模糊控制算法智能处理溶氧量,并配合云服务器和4G模块可实现远程监控,提高了监测效率。该系统能够实现高效智能的水产养殖,为养殖生产和物联网应用提供有效参考。
□
猜你喜欢
当代水产(2021年7期)2021-11-04
小学生优秀作文(低年级)(2020年11期)2020-12-14
当代水产(2019年7期)2019-09-03
建材发展导向(2019年10期)2019-08-24
当代水产(2019年1期)2019-05-16
当代水产(2019年3期)2019-05-14
电子制作(2018年14期)2018-08-21
中国科技纵横(2017年10期)2017-06-30
发明与创新(2016年34期)2016-08-22
阅读与作文(小学低年级版)(2016年2期)2016-03-12
