某型炮兵气象雷达野战标校系统∗
2019-11-13 08:19马林
舰船电子工程 2019年10期
马 林
(陆军炮兵防空兵学院士官学校 沈阳 110867)
1 引言
某型炮兵气象雷达是一种测量大气温度、气压、湿度和风向、风速等气象要素的野战机动式气象探测装备。它通过被动接收无线电探空仪发出的探空信号实施探测,具有电磁隐蔽性好、保障能力强、探测高度高等优点[1]。由于是机动式装备,所以占领新的探测阵地后,必须对雷达的方位角和仰角重新进行标校才能校正角度测量基准,保证角度测量的准确性。雷达标校方法主要有光学标校法和有源标校法[2],虽然雷达在野战条件下可采用共同点法、反觇法[3-4]和北极星法等光学标校方法,但是受野战条件限制,实施起来非常困难,难以保证测角精度。共同点法标校时需要利用雷达天线上的光学瞄准镜和光学经纬仪瞄向同一标校物,但是野战条件下很难找到适合的标校物,并且夜间无法进行准确标校。反觇法标校时需要利用雷达天线上的光学瞄准镜和光学经纬仪互瞄,这种方法存在标校距离短,精度难以保证、夜间标校难度大、无法进行仰角标校等问题。北极星法标校时需要利用雷达天线上的光学瞄准镜瞄准北极星,这种方法只能在晴空的夜间进行,受天气影响大。
鉴于以上问题,利用北斗差分定位、多重调制和单片机等技术,设计一种野战标校系统,对实现炮兵气象雷达全天候野战条件下的准确标校具有重要作用。
2 系统总体设计
2.1 标校原理
某型炮兵气象雷达野战标校系统的工作原理是:首先利用标校系统的北斗模块测量获取雷达天线方位和俯仰轴线交点大地坐标,然后利用系留探空气球或其他方式将标校系统置于标定点。气象雷达自动跟踪标校系统发出的包含标定点坐标信息的高频电磁波,使雷达天线电轴对准标定点。标校软件将雷达接收到的标定点坐标变换为以雷达天线方位和俯仰轴线交点为原点的直角坐标系中的坐标,然后根据两点的直角坐标计算雷达天线电轴指向标定点的准确方位角和仰角,与雷达方位角和仰角的测量值进行比较后得到系统误差。最后将得到的方位角和仰角的系统误差录入雷达数据处理系统完成标校工作。
2.2 系统组成
某型炮兵气象雷达野战标校系统主要硬件和软件两大部分组成,其中硬件由主控模块、北斗模块、信号生成模块、通信接口模块和电源等组成,软件主要包括标校软件。如图1所示。
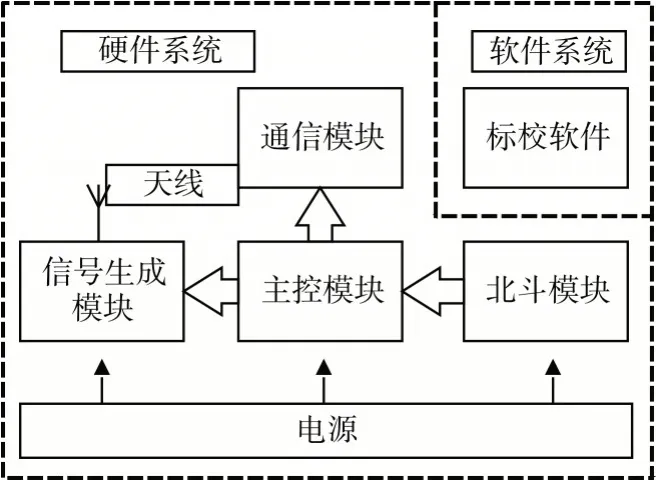
图1 系统组成
北斗模块主要用于接收北斗卫星信号,实现全天候实时定位和精准授时。主控模块系统硬件的核心,主要对北斗模块发送来的坐标和时间进行采集、编码和通信管理,实现副载波的产生和系统时序控制。信号生成模块主要用于产生某型炮兵气象雷达能够接收并解码的包含坐标和时间等信息的特定频率的信号。通信接口模块采用串口通信协议,主要用于程序下载和向PC 机发送坐标数据。电源主要完成整个硬件系统的供电。标校软件运行在气象雷达的PC 机上,主要用于计算雷达天线电轴指向标定点的准确方位角和仰角,与雷达测量角度值比较得出方位角和仰角校准值。
3 硬件设计
3.1 主控模块设计
主控模块主要由ARM微控制器、外部FLASH、晶振电路、稳压电路和复位电路等组成。ARM 选用意法半导体公司出品的32 位微控制器STM32F103RCT6,该微控制器基于ARM Cortex-M内核,时钟频率达到72MHz[5]。除具有丰富的接口之外[6~7],还内置低电压检测、调压器、RC 振荡器等,具有很高的集成度。主控模块外部FLASH 选用W25X16芯片,与微控制器的SPI接口PA4~PA7实现数据交互。虽然微控制器内部包含了8MHz的振荡器,但是为了保证系统时钟更加准确和稳定,在微控制器的OSC32IN 和OSC32OUT引脚接入32.768kHz 晶振作为外部低速时钟信号,在OSCIN和OSCOUT引脚接入8MHz晶振作为外部高速时钟输入信号。由于微控制器的供电要求为2.0V~3.6V,稳压电路选用输出电压为3.3V 的AMS1117作为调压芯片[8],并在其电源输出端连接10μF 的电容,在微控制器的电源和地之间设置两个电容进行滤波。主控模块框图如图2所示。
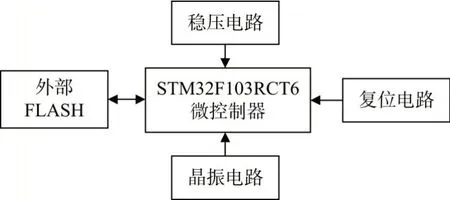
图2 主控模块框图
3.2 信号生成模块设计
信号生成模块主要通过信号调制电路实现副载波和二进制代码调制,通过功率放大电路实现载波信号调制和放大。微控制器将编码后的二进制坐标代码和定时器分频得到的副载波方波送入以74LS08 与门为核心的调制电路。当二进制坐标代码为正半周期时,受副载波调制形成周期变化方波;当二进制坐标代码为负半周期时,与门输出恒定负电压。经过调制电路调制后的数字信号送入功率放大电路,通过改变晶体管的偏置电压实现载波的调制和功率放大。当数字信号为“1”时,输出频率为f1,当数字信号为“0”时,输出频率为f0,从而使码元转换时刻两个载波相位能够保持连续。
3.3 通信接口模块设计
通信接口模块选用了CH340G 芯片作为USB转串口芯片。CH340G 正常工作时需要外部向其XI 引脚提供12MHz 的时钟信号[9~10]。虽然时钟信号可以由CH340G 内置的反相器通过晶体稳频振荡产生,但是为了确保信号稳定可靠,在XI 和XO引脚之间连接一个12MHz 的晶振,并且分别为XI和XO 引脚设计了对地连接振荡电容。CH340G 的5、6引脚分别接USB接口的D+和D-接口,2、3引脚分别接微控制器的USART 接口,通过CH340 的转换作用实现串口和USB接口间的数据传输。
4 标校软件设计
4.1 软件流程
标校软件的流程如图3所示。
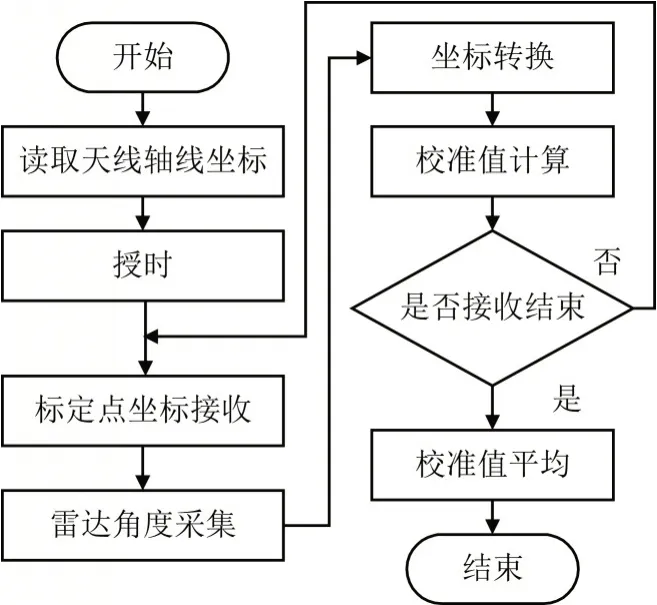
图3 标校软件流程
标校软件启动后,通过野战标校系统的通信接口读取测量获得的天线方位和俯仰轴线交点大地坐标,并对雷达PC 机进行授时。野战标校系统置于标定点,且雷达自动跟踪后,实时接收标定点坐标数据的同时触发采集雷达角度数据,通过坐标变换和校准值计算得到该组数据的角度差。经过多组数据计算后,对角度差进行算数平均得到雷达方位角和仰角的系统误差。
4.2 坐标变换方法
气象雷达采用左手站心直角坐标系,其原点o为天线方位和俯仰轴线交点,x轴指向坐标北,y轴指向坐标东,z轴与椭球法线向重合,指向天顶,如图4所示。
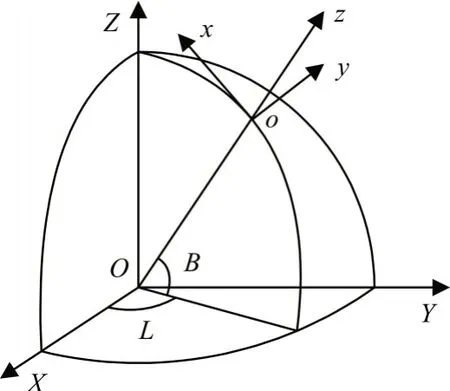
图4 站心直角坐标系
坐标转换时,首先将大地坐标系转为地心空间直角坐标系。其转换公式为
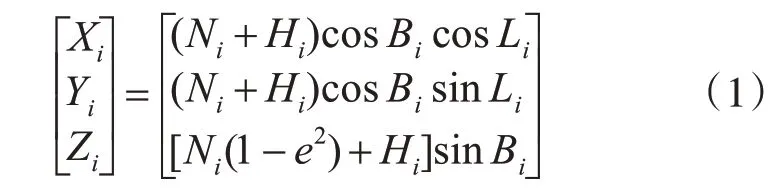
式中Bi,Li和Hi为大地坐标系中i点的纬度、经度和高程,Ni为过i 点的卯酉圈曲率半径,e2为第一偏心率平方,在CGCS2000 坐标系中,e2=0.006694380022900788[11]。
转换为地心空间直角坐标系后,利用布尔沙坐标转换模型[12~13]将坐标转换为右手站心直角坐标系,最后将x轴取负得到转换公式为
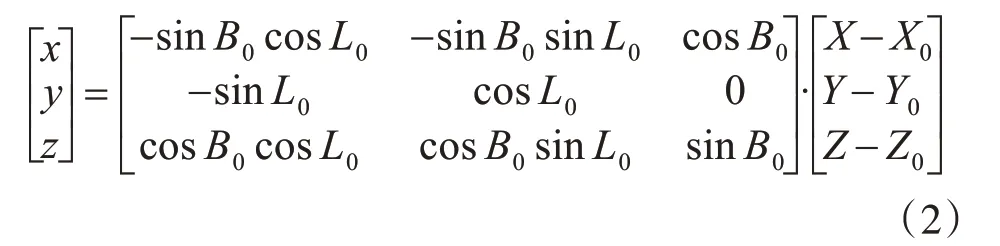
式中B0,L0和H0分别为雷达天线方位和俯仰轴线交点在大地坐标系中的纬度、经度和高程坐标。
4.3 校准值计算方法
利用标定点在站心直角坐标系中的坐标可以得到雷达电轴准确的方位角和仰角。
方位角计算公式为
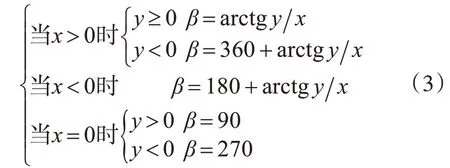
仰角计算公式为

雷达电轴准确的方位角、仰角和雷达测量的方位角、仰角分别作差可得到标校值。
5 结语
本文详细介绍了某型炮兵气象雷达标校系统的标校原理和系统组成,分别就系统硬件和软件的设计进行了具体介绍。该系统可有效解决目前野战标定方法存在的标校点少、夜间标校难度大、精度低等问题,对提高某型炮兵气象雷达全天候标定能力具有重要意义。
猜你喜欢
军事文摘(2022年19期)2022-10-18
中国信息化周报(2020年15期)2020-05-11
初中生世界·九年级(2020年2期)2020-04-10
新生代(2018年20期)2018-11-13
科技视界(2016年15期)2016-06-30
幼儿教育·父母孩子版(2015年9期)2015-11-09
中国高新技术企业(2015年23期)2015-06-24
物联网技术(2014年2期)2014-03-07
现代电子技术(2009年9期)2009-06-25
红领巾·成长(2009年8期)2009-01-12