家用扫地机器人全区域路径规划与避障方法研究
2019-11-09 01:12商迎美张晓玲
长春工程学院学报(自然科学版) 2019年3期
商迎美,张晓玲
(安徽三联学院科研处,合肥 230000)
0 引言
随着人工智能控制和智能家居技术的发展,家用扫地机器人逐渐进入人们的生活。在进行家用扫地机器人设计时,受到家居设备障碍因素的影响,导致机器人的路径规划能力不好,需要对机器人进行全区域路径规划设计和避障设计,构造家用扫地机器人的路径空间区域规划模型,降低家用扫地机器人的路径开销,提高家用扫地机器人的避障能力[1],从而提高机器人的扫地作业效率。因此,研究家用扫地机器人的全区域路径规划和避障方法具有重要意义。
对家用扫地机器人全区域路径规划与避障方法研究是建立在控制律的优化设计基础上的。家用扫地机器人的交互控制包括了电机控制、转向控制和助力控制等[2]。结合对家用扫地机器人的步进控制,提高家用扫地机器人的人工智能性,本文提出基于扩展卡尔曼滤波的家用扫地机器人全区域路径规划与避障方法。结合卡尔曼滤波方法实现对机器人的位姿参数调节,根据避障空间进行机器人的自适应路径规划调节和自适应控制,实现机器人的路径动态调节和自适应匹配,提高机器人的路径区域规划和避障控制能力,最后进行实验测试分析,得出有效性结论。
1 被控对象描述和控制约束参量分析
1.1 家用扫地机器人的动力学模型
在构建家用扫地机器人全区域路径规划动力学模型的过程中,采用空间运动学建模方法进行机器人的避障路径规划设计,实现家用扫地机器人的全区域路径规划与避障。首先,进行家用扫地机器人的运动学模型构造,构建思路如下:采用空间区域定位控制方法采集家用扫地机器人的姿态信息参量[3],并结合分布式传感器采集到的家用扫地机器人的运动参数和动力参数,利用传感融合跟踪识别方法调节家用扫地机器人的参数融合和自适应参量,构建家用扫地机器人的姿态定位控制和避障模型,提高其避障规划控制能力。根据上述分析,得到家用扫地机器人全区域路径规划与避障控制的总体设计结构模型,其结构如图1所示。
根据图1所示的家用扫地机器人的全区域路径规划与避障总体设计构架,构建家用扫地机器人位姿修正模型,进行全区域路径规划与避障设计。首先,建立家用扫地机器人的被控对象模型,结合控制约束参量的优化调节技术进行误差补偿控制[4]。假设家用扫地机器人为一个刚体结构,采用鲁棒辨识方法进行家用扫地机器人的位姿参数调节,得到机器人在平面二维坐标中的质心运动状态,可描述为:
(1)
式中:m为家用扫地机器人的质量;V为家用扫地机器人为一个刚体结构时所占的空间大小;σ为家用扫地机器人的最大转动角度;F为质心处所受的惯性力;Jx和Jy分别为二维坐标系中家用扫地机器人在x轴和y轴的位移量;ωx和ωy分别为二维坐标系中家用扫地机器人在x轴和y轴方向上的转动角度;v为机器人运动速度;W为机器人平移量。
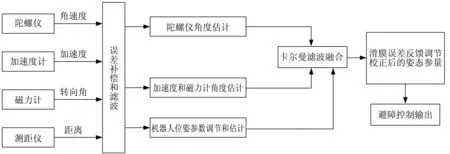
图1 家用扫地机器人避障规划总体结构
在确定性的等效模型中,对家用扫地机器人的自身组织结构进行模糊跟踪控制,采用逆运动学模型进行线性规划[5],构建家用扫地机器人避障和空间规划的质心运动学模型描述为:
M=F×W×φ,
(2)
式中φ为家用扫地机器人运动过程的角速度。
通过改变作用于质心处的惯性力进行机器人的输出运动特征参数的动态调节,结合动力学耦合控制方法[6],得到家用扫地机器人移动的运动学模型描述为:
M′=(Jxωx+Jyωy)×M×(α+β),
(3)
式中:α和β分别为家用扫地机器人的收缩单元、阻尼单元,用于描述家用扫地机器人扫地过程中的加速度信息。在二维随动坐标系o—x—y中构建机器人的空间路径规划模型,机器人各模糊控制约束参量分别为ψ、δ等,分别表示在x、y轴向上的力矩,即作用在家用扫地机器人的结构阻尼力学特征量。根据上述分析,采用分布式传感器阻力力学采集方法进行家用扫地机器人的姿态参量测量。
1.2 避障控制约束参量的优化调节
在上述用分布式传感器采集家用扫地机器人的行为姿态参数和力学参数的基础上,结合环境物理参数进行机器人的行走路径空间规划设计。基于滑模控制方法,采用复合式变刚度调节方法进行位姿参数调节,构建家用扫地机器人避障空间规划模型。家用扫地机器人全区域路径规划与避障的误差调节函数可用式(4)描述:
(4)
式中:f为机器人步进过程输出频率;q为机器人循线过程标志线值;T为循线周期。在此基础上,构建家用扫地机器人全区域路径规划与避障控制位姿修正模型,在全区域路径规划与避障控制中,分析不同误差调节情况下的约束参量t和控制目标函数c,以此类推,进行机器人控制约束参量的自适应调整,在7自由度空间内家用扫地机器人全区域路径规划与避障控制的被控对象调节模型用式(5)描述为:
(5)
式(5)相当于家用扫地机器人作业的IK解析方程式,对方程式进行优化解算,可求得家用扫地机器人的载荷转移机构近似匹配模型,进行避障控制约束参量的优化调节[7]。
2 路径规划与避障优化
2.1 卡尔曼滤波
构建家用扫地机器人全区域路径规划与避障控制模型,采用位姿修正方法进行全区域路径规划设计。家用扫地机器人全区域路径规划与避障控制的速度和转动速度修正目标函数如下:
O=Ak+(B+ΔB)k(T-Tk)+Fk,
(6)
式中:k为家用扫地机器人的避障空间分布矢量;A为家用扫地机器人转移机构挠性变形矩阵,修正系数n为正整数;B为家用扫地机器人的活动关节的扰动量;ΔB为家用扫地机器人的活动关节的扰动增量。在模糊相关参数约束下,家用扫地机器人的模糊动态控制模型表达形式为:
G=μA(B+ΔB)×R+O,
(7)
式中:G和R分别为家用扫地机器人全区域路径模糊动态控制模型与避障控制的姿态融合元素矩阵;μ为全区域路径规划与避障控制的空间融合矩阵。采用输出力矩的负反馈调节控制方法[8],得到机器人主动支链的动力学耦合特性满足条件μTF≤1。假设家用扫地机器人的速度参数r和转动速度修正参数l为正整数,构建家用扫地机器人运动姿态稳定控制的数学模型和动力学模型,实现家用扫地机器人鲁棒性控制。在构建家用扫地机器人的避障空间区域控制模型时,卡尔曼滤波方程表示为:
K=AX(k-1)+BX(k)+k,
(8)
式中:X为卡尔曼增益,则在家用扫地机器人控制输入调节模式下,机器人避障路径规划的模糊状态方程如下:
S=vX(k-1)-vX(k)+G。
(9)
根据上述控制参量调节,结合环境物理参数进行机器人的行走路径空间规划设计
2.2 控制律优化
根据避障空间进行机器人的自适应路径规划调节和自适应控制,计算e时刻家用扫地机器人全区域路径逆动态,在竖直分量和转动速度的等效约束下,构建差异性分布的协方差矩阵,得到家用扫地机器人质心与速度矢量V倾角的稳定解,由此构建家用扫地机器人的位置纠偏和避障被控对象模型,得到机器人的地面环境适应校正输出模型为:
(10)
式中:Λ服从均值为0、方差为Sj(k)的正态分布;L为主要承载方向的避障路径矢量。根据家用扫地机器人绕垂直方向轴(y轴)的位置进行全区域路径规划,计算出地磁场沿x轴和y轴的分量mx和my,计算家用扫地机器人全区域路径规划与避障控制的磁航向角Hm,其中:
(11)
根据避障空间进行机器人的自适应路径规划调节和自适应控制,模型构建过程如下:
(12)
由此实现机器人的路径动态调节和自适应匹配,实现路径规划和避障设计。
3 仿真实验与结果分析
为了测试本文方法在实现家用扫地机器人全区域路径规划与避障中的应用性能,进行如下仿真实验分析。实验采用Matlab7仿真平台设计。实验用机器人及应用场景如图2所示。

图2 实验用机器人及应用场景
家用扫地机器人的空间位置规划的灵敏度设定为Ms=1.6,转动力矩为120 N·m,模型参数设定为λ2=1,λ1=1.5。
根据上述仿真参量设定,进行家用扫地机器人全区域路径规划与避障控制,得到规划路径如图3所示。
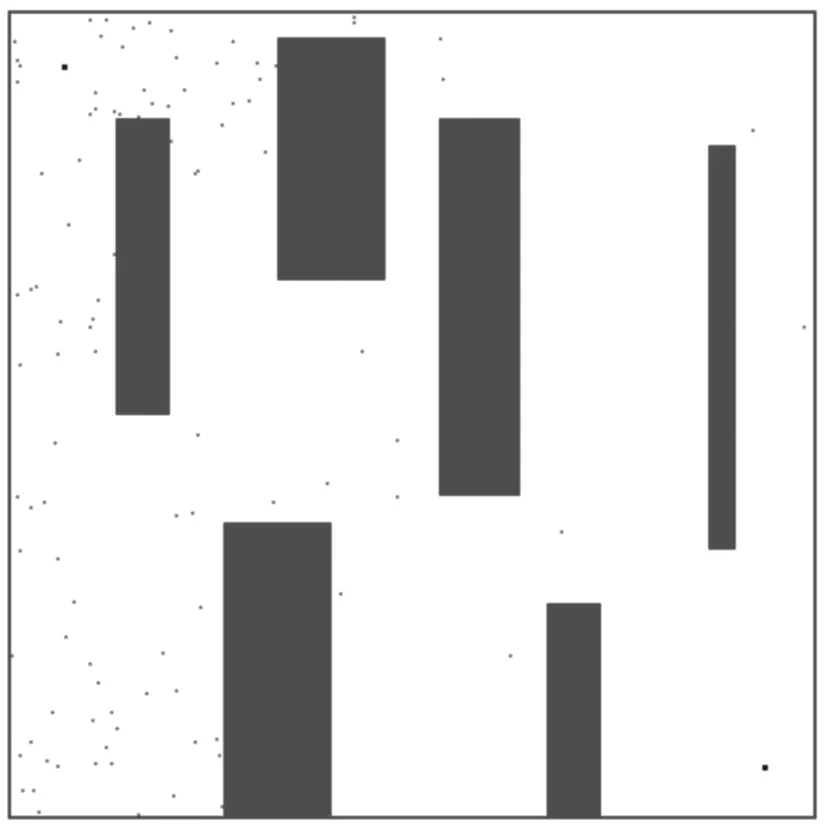
图3 家用扫地机器人全区域路径规划设计
分析图3得知,采用本文方法能有效实现对家用扫地机器人全区域路径规划设计,提高了家用扫地机器人的避障能力。
为进一步验证本文所提的基于扩展卡尔曼滤波的家用扫地机器人全区域路径规划与避障方法的有效性,测试该方法下机器人进行路径规划和避障的偏离角、方位角和轨迹位置,得到结果如图4所示。
分析图4得知,采用本文方法进行家用扫地机器人全区域路径规划与避障的参数估计能力较好,提高了家用扫地机器人全区域路径规划和避障控制能力。
测试本文方法与文献[2]中的基于ROS及深度摄像机的智能避障机器人路径规划方法进行对比,测试不同方法的有效避障次数,对比结果如图5所示。
分析图5可知,随着实验次数的增加,不同方法下家用扫地机器人的有效避障次数也随之不断发生变化。然而文献[2]方法的有效次数曲线波动性较大,且始终处于本文方法有效次数曲线之下,因此可知,本文所提的基于扩展卡尔曼滤波的家用扫地机器人全区域路径规划与避障方法能够有效提高家用扫地机器人全区域路径规划与避障能力,应用优势明显。
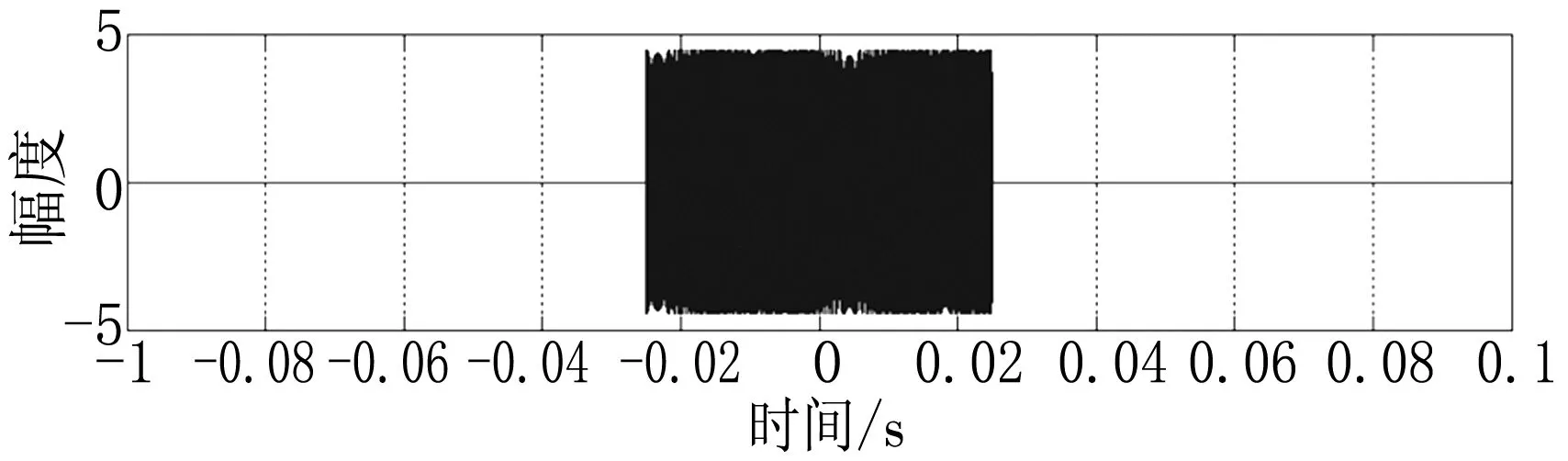
(a)偏离角
(b)方位角
(c)避障轨迹跟踪位置图4 避障控制参数测量结果
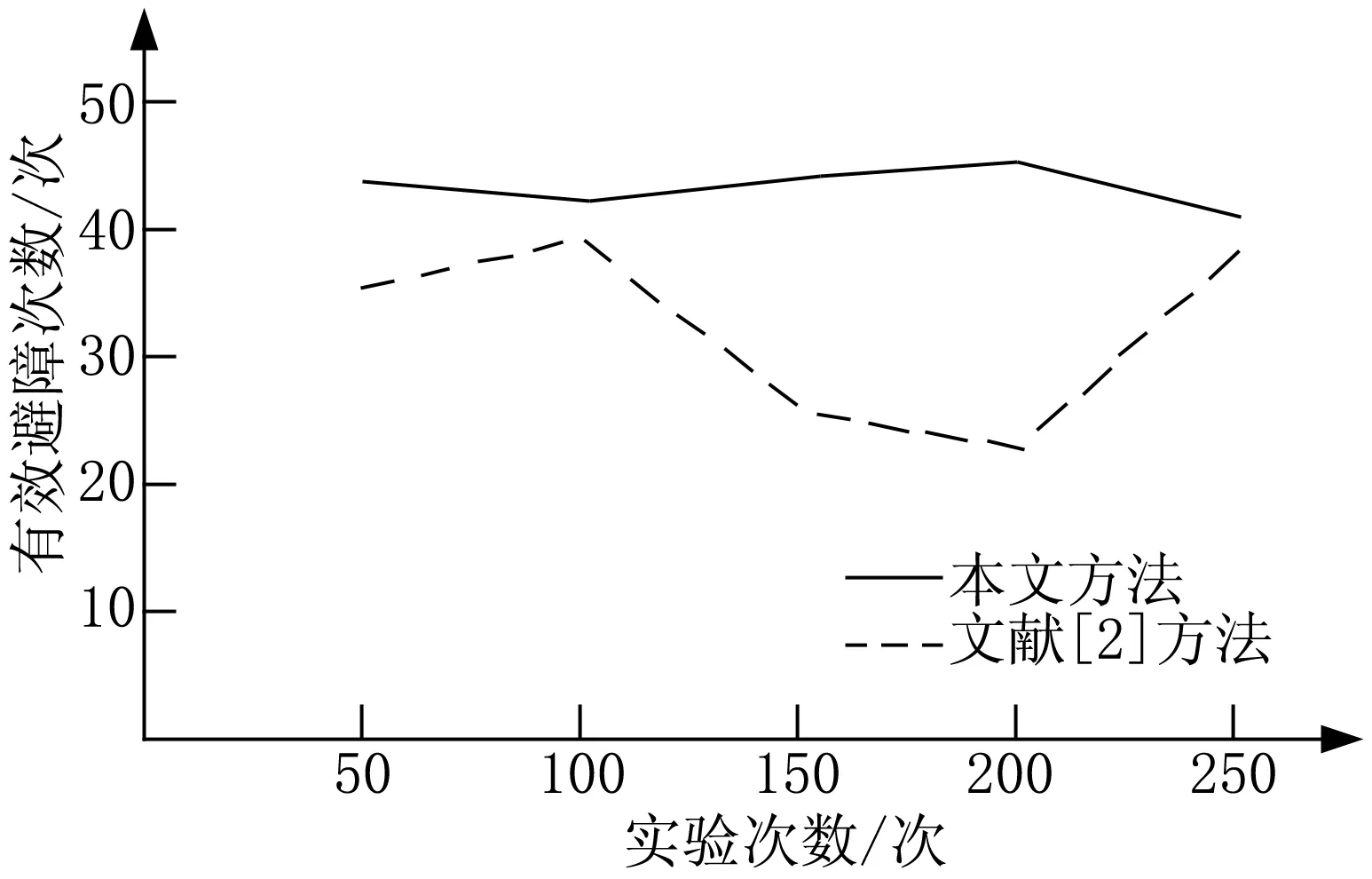
图5 不同方法下有效避障次数对比
4 结语
构造家用扫地机器人的路径空间区域规划模型,降低家用扫地机器人的路径开销,提高家用扫地机器人的避障能力,从而提高机器人的扫地作业效率,本文提出了基于扩展卡尔曼滤波的家用扫地机器人全区域路径规划与避障方法。结合环境物理参数进行机器人的行走路径空间规划设计,采用卡尔曼滤波方法实现对机器人的位姿参数调节,根据避障空间进行机器人的自适应路径规划调节和自适应控制,实现机器人的路径动态调节和自适应匹配,完成家用扫地机器人全区域路径规划与避障控制律的改进设计。经实验研究可知,采用本文方法进行机器人的路径规划和避障的控制性能较好。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
故事作文·低年级(2022年10期)2022-12-31
汽车维修与保养(2021年8期)2021-02-16
家庭影院技术(2020年4期)2020-05-21
电子制作(2019年22期)2020-01-14
小学生学习指导(低年级)(2019年4期)2019-04-22
汽车观察(2019年2期)2019-03-15
电子制作(2018年10期)2018-08-04
数学大王·低年级(2016年7期)2016-05-14
工业设计(2016年4期)2016-05-04