
对无人机光电系统机载干扰模式仿真分析
2019-11-06 08:42:32都元松董文锋黎波涛
火力与指挥控制 2019年9期
都元松,董文锋,黎波涛,罗 威
(1.空军预警学院,武汉 430019;2.解放军93107 部队,沈阳 110000;3.解放军95763 部队,西藏 日喀则 857000)
0 引言
美国某型高空无人侦察机自问世以来,多次飞抵我国东部沿海实施高空侦察,严重威胁我东部沿海重要目标的保密安全。该机种携带的机载任务设备主要有合成孔径雷达侦察系统、光电侦察系统、电子侦察系统以及雷达告警、诱饵自卫系统等,侦察手段多,侦察精度高,威胁大[1]。为应对高空无人侦察机对我国沿海边境及重点防护区域侦察,利用强激光干扰技术对高空无人侦察机光电侦察实施有源干扰[2-4]是一种有效的选择。
实现对空中目标光电侦察系统的强激光干扰,前提是有效发现目标并进行实时跟踪[5-7]。由于地对空侦察距离远、目标小、大气透过率低、信号特征弱,对于如何能够进行有效的区域性防护是目前的一个重难点问题。利用机载干扰模式实现空对空强激光干扰高空无人侦察机光电侦察设备是目前较为有效的一种干扰手段,干扰机越高,大气越稀薄,激光透过性越好,功率利用率高;并且距被干扰飞机近,且能够在伴随飞行中始终实施干扰,有效干扰时间长。本文就我方重点目标防护区域、高空无人侦察机光电探测距离、高空无人侦察机飞行高度以及干扰机飞行高度4 个因素进行了详细的分析;通过模拟设定高空无人侦察机光电探测系统光饱和功率密度,给出了模拟仿真条件下最小干扰激光功率值。
1 机载干扰模式分析
机载随队干扰模式是利用一架或者多架干扰机,每架干扰机固定防护一个区域。我方可利用雷达等主动/被动探测设备对高空无人侦察机实现精确定位,确定其空间三维坐标位置、航向及速度,引导我方干扰机精确控制航线,包括我方干扰机高度、航速和航向等,使其能够始终介于高空无人侦察机光电探测器和被保护的我方重要目标两者连线之间,如图1 所示。只要高空无人侦察机光电侦察设备对我重要区域实施侦察,我机载激光干扰设备就能保证激光束进入高空无人侦察机光电侦察设备的瞬时侦察视场,对其实施有效干扰。

图1 机载伴飞干扰示意图
1.1 高空无人侦察机航线模型
为分析简便起见,假定高空无人侦察机沿我方重点防护区域一侧直线飞行实施高空侦察。假设高空无人侦察机光电探测设备能视阈参数为:方位ω∈(75°~105°)和ω∈(255°~285°),Δω=30°;滚转φ∈(-80°,80°),Δφ=160°;俯仰∈(-15°,15°),Δ =30°,如图2 所示。


图2 高空无人侦察机光电探测器侦察态势图
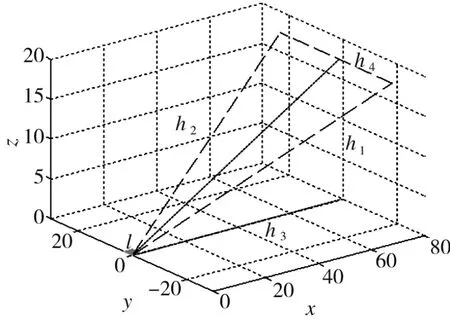
图3 高空无人侦察机飞行航迹态势图

图4 高空无人侦察机对地目标侦察态势图
1.2 干扰机航线模型
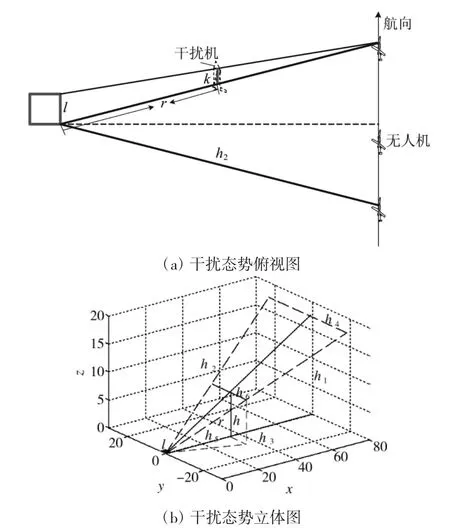
图5 干扰机对高空无人侦察机实施跟踪干扰态势图

1.3 空对空干扰部署带模型


图6 空对空干扰部署带示意图
1.4 机载干扰功率模型
为应对高空无人侦察机光电侦察,采取强激光干扰方式是目前较为有效的干扰方法,实施机载干扰最大难点是干扰激光光轴对准高空无人侦察机光电探测器,如下页图7 所示。其基本条件是干扰机发射出的干扰激光功率Pt大于高空无人侦察机光电探测器饱和阈值Pth,将被视为干扰有效。

图7 机载干扰模式态势图
高空无人侦察机光电探测器接收干扰激光功率受以下几个因素影响:干扰机发射功率Pt,激光发散角θ,干扰机距离高空无人侦察机光电探测器距离R,高空无人侦察机光电探测器口径D,高空环境下大气传输速率。
根据发散角指标,激光到达高空无人侦察机光斑面积为

光斑半径为

高空无人侦察机光电探测器处的激光功率密度为

大气传播的光束不仅因吸收和散射现象而损失能量,同时也受到大气湍流的影响。大气湍流运动是由于太阳辐射和各种气象因素所产生的大气温度的微小随机变化所导致的大气风速的随机变化而形成。大气温度变化导致大气密度的变化从而导致大气折射率的变化。变化的累积导致大气轮廓折射率廓形的明显不均匀性,由此引起光束抖动、强度起伏、光束扩展以及像点抖动等大气湍流效应。
大气湍流对光束特性的影响程度与光束的直径d 与湍流尺度m 的相对大小有关。当d/m<<1 时,湍流的主要作用是使光束产生随机偏折;当d/m≈1时,湍流的作用是使光束截面发生随机偏转,从而形成到达角起伏,使光学系统接收时,在焦平面上出现像点抖动;当d/m>>1 时,光束截面内将包含许多湍流,各自对照射的那一小部分光束起衍射作用,从而使光束强度和相位在空间和时间上出现随机分布,光束面积也在增加[8],如图8 所示。由以上分析可知高斯光束经远距离传输可类比为均匀分布。
由于对光学辐射传输特性影响最严重区域是对流层,它集中大气含量的80 %,也是产生大气湍流最严重的区域。为避免因大气影响而带来的能量衰减,干扰机飞行高度应尽可能达到10 km 以上。在国产无人机中,从载荷能力、航速、飞行高度、滞空时间等条件,“翔龙”无人机具备装载激光干扰器、伴飞干扰光电侦察系统的条件。

图8 光束扩展示意图
假设高空无人侦察机光电探测器饱和阈值为Pth,根据理论分析可知干扰机最小发射功率为

由于干扰激光达到高空无人侦察机光电探测器时成均匀分布,可得干扰激光光轴向四周最大偏离角θ1为


图9 干扰激光光轴偏离角
2 仿真与数据分析
当高空无人侦察机对我方阵地实施高空光电侦察时,为确保我方阵地得到有效防护,采用空对空干扰方式,使得干扰飞机始终保持在高空无人侦察机和需要防护区域的连线之间。因此,空中将形成对高空无人侦察机实施激光主动探测强激光干扰的一条干扰部署活动带,如图6 所示。为探究影响干扰部署活动带区域范围的因素,下面就防护区域、高空无人侦察机探测距离、高空无人侦察机飞行高度以及干扰机飞行高度4 个方面进行仿真分析。
2.1 干扰部署活动带受防护区域影响分析
设定高空无人侦察机飞行高度h1=18 km,光电探测距离h2=80 km,我方干扰机飞行高度h=10 km,仿真分析空中干扰部署活动带宽度及面积随不同防护区域变化结果,如图10 和表1 所示。由图10可以看出,在高度h=10 km 处干扰部署活动带宽度及空中被侦测面积在高空无人侦察机飞行高度、光电探测距离,以及干扰机飞行高度一定的前提下与被防护目标的边长成正比关系。随着防护区域面积的增加,空中干扰部署活动带宽度及在高度h=10 km处被侦测面积也随之增大。因此,为实现对较大区域目标实施区域性防护,势必改变干扰机空中部署的方位及架数。

表1 不同防护区域下干扰带变化范围

图10 干扰部署活动带随防护区域变化散点图
2.2 干扰部署活动带受高空无人侦察机光电探测距离影响分析
设定高空无人侦察机飞行高度h1=18 km,地面防护区域边长l=3 km,我方干扰机飞行高度h=10 km,仿真分析空中干扰部署活动带宽度及在高度h=10 km 处被侦测面积随高空无人侦察机探测距离变化结果,如表2 所示。由表2 可以看出,干扰部署活动带宽度不随高空无人侦察机光电探测距离的变化而变化,但在高度h=10 km 处被侦测面积随高空无人侦察机光电探测距离的变化而变化,且成正比关系,如图11 所示。因此,改变高空无人侦察机光电探测距离,不会影响我方干扰机部署架数及飞行航向。但干扰机初始位置、飞行方位及飞行时间将随高空无人侦察机光电探测距离的变化而变化,如图12 所示。
2.3 干扰部署活动带受高空无人侦察机飞行高度影响分析
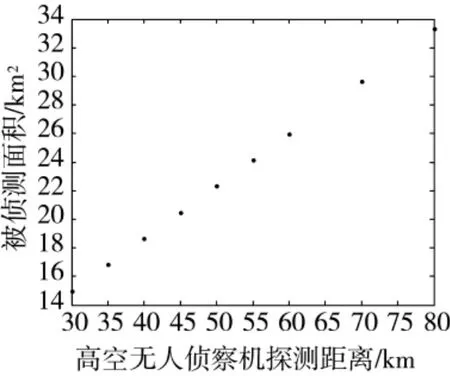
图11 干扰部署活动带随探测距离变化散点图
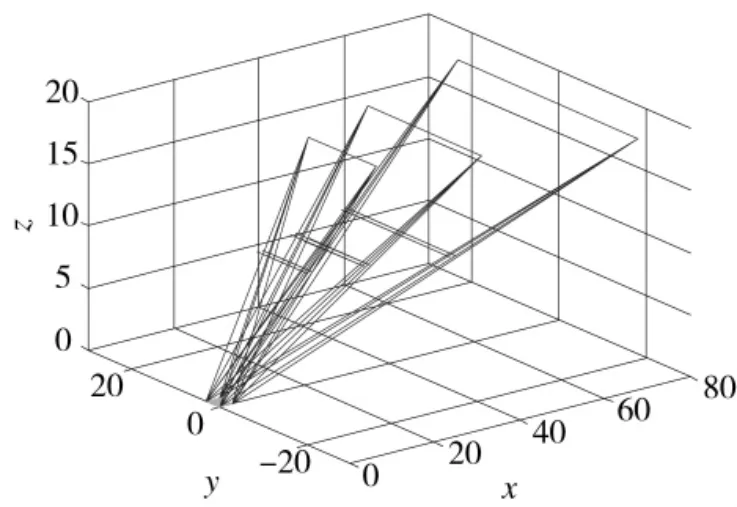
图12 干扰部署活动带随探测距离变化态势图

表2 不同探测距离下干扰带变化范围
设定高空无人侦察机探测距离h2=80 km,地面防护区域边长l=3 km,我方干扰机飞行高度h=10 km,仿真分析空中干扰部署活动带宽度及在高度h=10 km 处被侦测面积随高空无人侦察机飞行高度变化结果,如下页表3 所示。由表3 和图13 可以看出,干扰部署活动带宽度及在高度h=10 km 处被侦测面积随高空无人侦察机飞行高度的增高而增大,这势必会影响我方干扰机空中防御部署位置甚至增加干扰机数量,且当高空无人侦察机飞行高度达到16 km 高空时,其在高度h=16 km 处被侦测面积变化范围明显减小。对我方干扰机而言,高空无人侦察机飞行高度越高,越不利于我方干扰机对其实施强激光干扰。但由仿真数据可得其最大干扰部署活动带宽度及在高度h=10 km 处被侦测面积,为我方干扰机实施空中防护提供了最大理论防护范围,具体干扰区域变化如图14 所示。
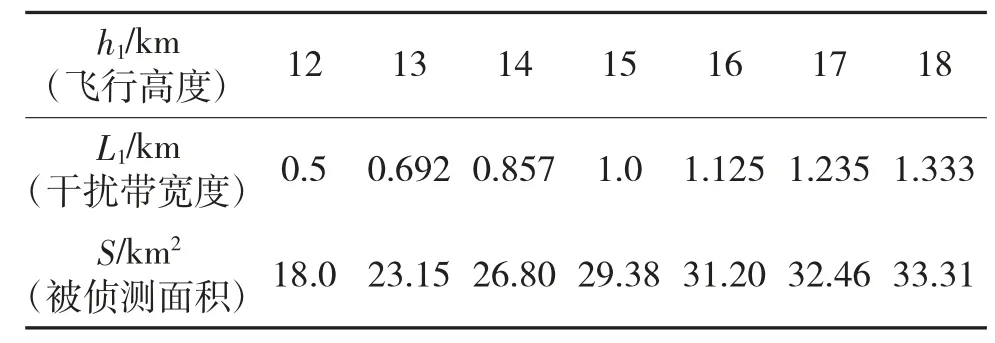
表3 高空无人侦察机不同飞行高度下干扰带变化范围

图13 干扰部署活动带随高空无人侦察机飞行高度变化散点图
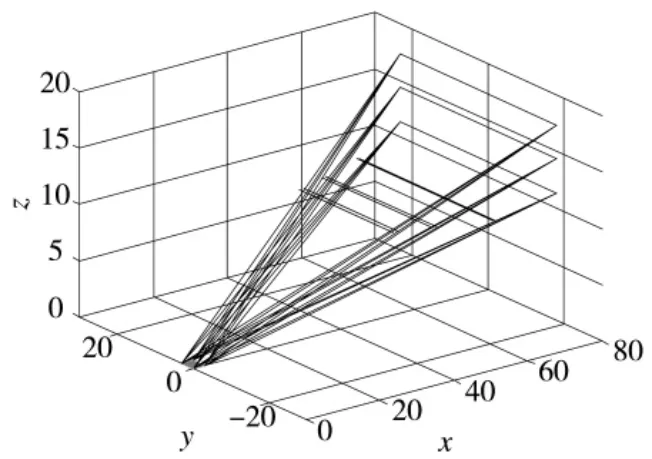
图14 干扰部署活动带随高空无人侦察机飞行高度变化态势图
2.4 干扰部署活动带受干扰机飞行高度影响分析
设定高空无人侦察机探测距离h2=80 km,地面防护区域边长l=3 km,高空无人侦察机飞行高度h1=18 km,仿真分析空中干扰部署活动带宽度及空中被侦测面积随我方干扰机飞行高度变化结果,如表4 所示。由表4 和图15 可以看出,干扰部署活动带宽度及空中被侦测面积随干扰机飞行高度的增高而减小,其中干扰部署活动带宽度随干扰机飞行高度成正比逐步减小,而空中被侦测面积随干扰机飞行高度成指数倍逐步减小。可知干扰机飞行高度越高,所形成的空中干扰部署活动带宽及空中被侦测面积越小,越有利于对高空无人侦察机实施有效干扰,如图16 所示。
2.5 机载干扰激光光轴最大偏离角数据分析
由式(1)~式(3)可知,高空无人侦察机光电探测器接收功率与大气透过率、激光发散角、相对距离以及干扰机激光发射功率有关。设定高空无人侦察机与干扰机之间距离R=35 km,激光发散角θ=0.1 mrad,高空无人侦察机光电探测器口径D=0.28m,高空环境下大气透过率=0.5。根据有关资料数据,假设高空无人侦察机光电探测系统光饱和功率密度为2.174×10-4W/cm2,改变干扰机发射功率,当干扰光束光轴对准光电探测系统时,仿真分析高空无人侦察机光电探测系统接收到的激光平均功率随我方干扰机发射功率变化结果,如表5 所示。高空无人侦察机光电探测系统接收功率密度与干扰机激光发射功率成正比。
表4 干扰机不同飞行高度下干扰带变化范围

图15 干扰部署活动带随干扰机飞行高度变化散点图
图16 干扰部署活动带随干扰机飞行高度变化态势图
表5 高空无人侦察机接收干扰激光功率随干扰机发射功率变化
由式(4)可知,当高空无人侦察机光电探测系统光饱和功率密度为2.174×10-4W/cm2时,干扰机最小发射功率为69.721 1 W。
由式(1)、式(2)、式(5)可知,干扰激光光轴与探测系统光轴偏离角受干扰机激光功率影响,如下页表6 所示。当高空无人侦察机与干扰机相距35 km时,其最大偏离角为0.046 mrad。当激光光轴偏角大于最大偏离角时,干扰激光不能进入高空无人侦察机光电探测系统,则对高空无人侦察机光电探测系统干扰无效。

表6 光轴偏离角受高空无人侦察机与干扰机之间距离变化影响
3 结论
本文提出了对高空无人侦察机光电侦察系统实施无人机机载强激光主动干扰的模式。首先根据高空无人侦察机飞行高度、探测距离、飞行速度、俯仰角、横滚角等各项指标,以及辅助情报支援系统对敌我双方无人机的跟踪定位(粗定位),确定敌无人机飞行位置、轨迹,引导我干扰机与敌无人机伴随飞行,使我干扰机始终处于敌无人机与我方被保护地面目标之间;同时,引导机载强激光干扰系统跟瞄装备捕获的光电探测器,对其实现精跟踪并实施及时干扰。为此,构建了空间三维坐标模型,计算出了机载模式下空中干扰机部署活动带及干扰区域;通过设定敌无人机光电探测系统光饱和功率密度,根据干扰机与敌无人机相对距离、激光发散角及高空条件下大气透过率,模拟仿真得出实现干扰机对敌光学探测系统干扰有效的最小发射功率和激光光轴偏离角。研究模型和结论可为机载干扰战术应用提供理论支撑。
猜你喜欢
热带作物学报(2021年1期)2021-02-22 07:31:25
航天电子对抗(2019年4期)2019-12-04 09:01:49
儿童故事画报·智力大王(2019年12期)2019-02-02 04:18:51
科技信息·中旬刊(2018年9期)2018-10-21 12:27:55
北京航空航天大学学报(2017年9期)2017-12-18 07:12:24
百科探秘·航空航天(2017年3期)2017-07-12 14:13:50
航空模型(2016年5期)2016-07-25 08:59:26
军事运筹与系统工程(2016年4期)2016-07-10 09:22:26
现代兵器(2016年6期)2016-06-25 16:18:06
百科探秘·航空航天(2015年12期)2015-11-07 07:05:52
