基于滑模观测器的永磁同步电机无传感器控制
2019-10-24 08:49白阿伟姜春霞
科技创新与应用 2019年26期
白阿伟 姜春霞
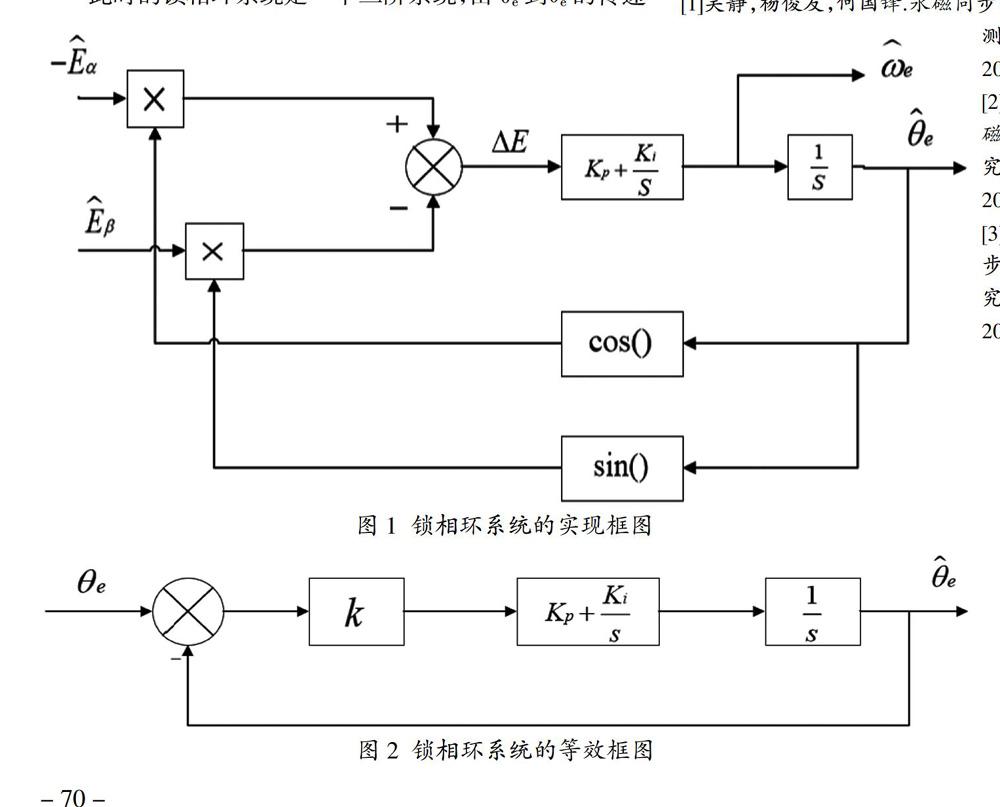
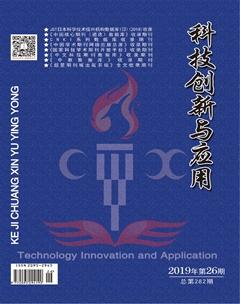
摘 要:在永磁同步电机无传感器控制时,采用基于滑模变结构的转子信息估算方法。在传统滑模观测器基础上,使用饱和函数代替了原始切换函数。为减小控制系统的抖振,转子位置和转速信息由锁相环系统提取。最后通过仿真实验分析了滑模观测器的稳定性,验证了控制策略的可行性。
关键词:滑模观测器;锁相环;抖振
中图分类号:TM341 文献标志码:A 文章编号:2095-2945(2019)26-0069-02
Abstract: In sensorless control of permanent magnet synchronous motor (PMSM), the rotor information estimation method based on sliding mode variable structure is adopted. Based on the traditional sliding mode observer, the original switching function is replaced by the saturation function. In order to reduce the chattering of the control system, the position and speed information of the rotor are extracted from the PLL system. Finally, the stability of the sliding mode observer is analyzed through simulation experiments, and the feasibility of the control strategy is verified.
Keywords: sliding mode observer; phase-locked loop; chattering
引言
实现对永磁同步电机高性能控制离不开对转子位置和转速信息的精确测量。目前对永磁同步电机无传感器控制技术的研究已成为国际电工领域的研究热点问题。在估计电机转速和转子位置时,滑模观测器与高频注入法、扩展卡尔曼滤波法、人工智能理论估计法、模型参考自适应法[1-2]等方法相比,使用的算法不仅简单,易于实现,还具有较强的鲁棒性[3]。因此,滑模变结构控制已广泛应用到永磁同步电机无传感器控制系统中。
1 传统滑模观测器设计
传统滑模观测器算法多数是基于α-β坐标系下的数学模型设计的,对于表贴式永磁同步电机,Ld=Lq=Ls(Ld,Lq为定子电感),因此其端电压可表示为:
4 结束语
本文提出一种基于改进型滑模观测器的永磁同步电机无传感器控制技术。以饱和函数为系统切换函数,通过低通滤波器得到光滑的控制率,最后采用锁相环系统从反电动势信息中提取出永磁同步电机的转子位置和转速信息。通過仿真实验对系统的稳定性进行分析后可知,这种改进型的滑模观测器不仅减小系统的抖振问题,且提高了控制精度,还可用于恒速或变速的复杂环境,并具有更高的性能和良好的稳定性。
参考文献:
[1]吴静,杨俊友,何国锋.永磁同步电动机无传感器控制的滑模观测器[J].沈阳工业大学学报,2006,28(1):45-49.
[2]褚丹丹.基于滑模观测器的永磁同步电机无传感器矢量控制研究[D].哈尔滨:哈尔滨工业大学,2015.
[3]刘计龙,肖飞,沈洋,等.永磁同步电机无位置传感器控制技术研究综述[J].电工技术学报,2017,32(16):84-85.