火星精确定点着陆多信息融合自主导航与控制方法研究
2019-10-24 01:52黄翔宇胡荣海李茂登郭敏文胡锦昌
深空探测学报 2019年4期
黄翔宇,徐 超,胡荣海,李茂登,郭敏文,胡锦昌
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
引 言
开展火星探测对于人类了解地球,认识类地行星演化、探索生命起源等具有重要的意义。美国、俄罗斯、欧洲航天局等国家和组织先后多次实施了火星无人探测任务,目前我国也正在独立开展火星探测计划。随着深空探测技术的发展,火星着陆探测任务更侧重于科学探索与研究,往往关注天体的一些特殊地点(如陨石坑附近)。为对这些特殊地点进行探测(定点采样),需要探测器精确着陆在特定地点附近(100 m范围内),着陆点的偏离将直接导致探测任务的失败。尤其是对于深空载人登陆任务,为了保证人员的安全,很可能要求着陆探测器落在事先选定的小范围安全着陆区内,而对于建立地外天体基地来说,更是要求着陆探测器降落在基地附近某个特定的范围内,以降低人员、物资在天体表面运输的成本。
传统的火星着陆任务大都采用惯性测量单元(Inertial Measurement Unit,IMU)进行惯导外推的导航方式,而且不对着陆轨迹进行控制,着陆误差椭圆通常在300~100 km范围[1-2]。目前实现的火星着陆任务精度最高的是“好奇号”任务,“好奇号”任务首次在火星大气进入段采用了进入制导控制技术[3],其实际着陆偏差为2.2 km×0.4 km[4],但其对于未来火星精确着陆任务的需求还存在一定差距。
为了实现火星着陆器具备优于100 m的精确着陆能力,需要发展新一代的火星着陆进入、下降和着陆(Entry,Descent and Landing,EDL)过程自主导航技术,在此基础上还需要研究高精度的火星EDL 过程自主制导与控制技术[5-6]。本文针对火星定点采样、载人登陆和基地构建等任务对高精度定点着陆的需求,提出了一种火星精确定点着陆自主导航与控制(Guidance Navigation and Control,GNC)方案,仿真实现了高精度的定点着陆和相对避障。
1 火星精确定点着陆自主GNC
1.1 任务分析与方案设计
对火星高精度定点着陆任务来说,自主GNC 系统需要具备如下功能:①高精度自主轨道和惯性姿态确定;②高精度进入点捕获轨道控制;③高精度大气进入过程制导与控制;④高精度自主相对避障导航与控制等。
针对火星高精度定点着陆任务的功能需求,参考“嫦娥3 号”着陆器[7-9]和美国的“好奇号”[4]进入着陆过程任务段设计情况,将火星进入着陆过程分解为8 个任务段,如图1所示。大气进入前任务分为进入准备段和攻角配平段,用来实现进入点的高精度导航和进入轨道控制功能;升力控制段用来实现高精度的大气进入过程制导与控制功能;伞降控制段用来实现合理的伞降减速过程;动力减速段用来实现高精度的绝对着陆点位置和粗避障控制功能;悬停成像段用来实现高精度的三维和平面图像的成像功能;避障机动段和缓速下降段用来实现基于序列图像跟踪的高精度自主相对避障导航与控制功能。
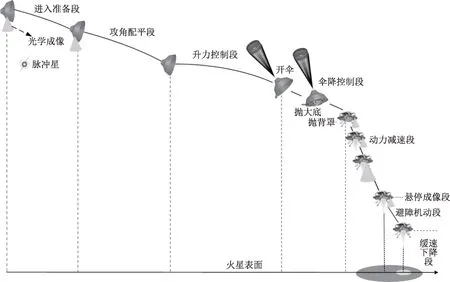
图1 火星精确定点自主着陆过程示意图Fig.1 The schematic diagram of Mars pinpoint landing
对于大气进入前的高精度导航,目前已实施的火星任务都采用了利用地面测控站的轨道确定方案,但这种导航方式存在时延大、无法及时获知轨道变化导致无法及时响应任务需求等缺点。而已有的基于火星图像边缘轮廓信息的自主导航受导航敏感器分辨率和火星形状等限制,导航精度(1~10 km)十分有限,无法满足高精度导航需求。
对于深空着陆过程的自主导航,目前广泛使用的是基于惯性导航配以测距测速修正或替换的导航方法。但是单纯的测距测速信息无法为导航系统提供完备的水平位置误差修正信息,这种方法只能满足对着陆精度要求不太高(km 量级)的探测任务需求,难以满足精确定点着陆任务的需要。
考虑到火星表面分布着大量形状各异的陨石坑、岩石和纹理等自然陆标,这为利用已知特征陆标进行导航提供了可能。通过探测器环绕遥感探测,天体表面绝大部分陆标特征和位置信息都能以较高精度获取。这些自然陆标尺寸相对较小,所以在进入和着陆过程能够利用窄视场、高精度成像导航敏感器实现对特征陆标的高精度观测,进而能实现基于陆标图像等信息的高精度自主导航。
针对大气进入前的高精度自主导航需求,提出采用一种基于X射线脉冲星和火星表面陆标图像的融合自主导航方案。针对火星EDL 过程的高精度绝对和相对导航需求,提出了一种基于陆标图像、IMU 和测距测速信息的多信息融合着陆自主导航方案,解决了已有着陆导航方法存在的水平位置信息缺失问题,实现了完备位置信息的获取。针对进入点捕获轨道的高精度控制需求,采用基于目标B 平面参数的自主捕获轨道修正策略;针对大气进入过程的高精度控制需求,采用基于标称轨迹的预测校正制导[4],设计了标称轨迹和控制系数在线设计和更新流程。针对高精度自主相对避障导航与控制的需求,提出了基于序列图像跟踪的高精度相对导航与水平控制方法。整个进入着陆任务过程的姿态控制都采用PID+PWM控制[10]。
1.2 系统配置与执行流程
针对火星定点着陆任务的高精度自主导航需求,着陆探测器需配置惯性测量单元、星敏感器、光学成像敏感器和X射线脉冲星敏感器以及专门用于避障的三维成像敏感器。为了保证系统的冗余和故障诊断的需求,惯性测量单元至少配置2套,分别为含3个正交安装的加速度计和3个正交安装的陀螺仪;星敏感器3台、光学成像敏感器2台、X射线脉冲星敏感器1台。其中,惯性测量单元(IMU)、星敏感器和光学成像敏感器集成设计,并配置了高精度二维转动指向机构,形成共基准的一体化导航敏感器。一体化导航敏感器组合了星敏感器、光学成像敏感器、IMU 和二维指向机构的功能,形成一个独立于探测器本体的导航平台,具备对导航目标的连续跟踪能力,自主的导航目标捕获能力,避免了对探测器姿态机动的依赖。针对火星定点着陆任务的高精度控制需求,着陆探测器需配置足够数量的用于姿态和水平控制的推力器和用于轨道控制的主发动机。针对火星定点着陆任务的要求,参考“嫦娥3 号”着陆器GNC 系统结构[7-8],设计的自主GNC系统结构如图2所示。
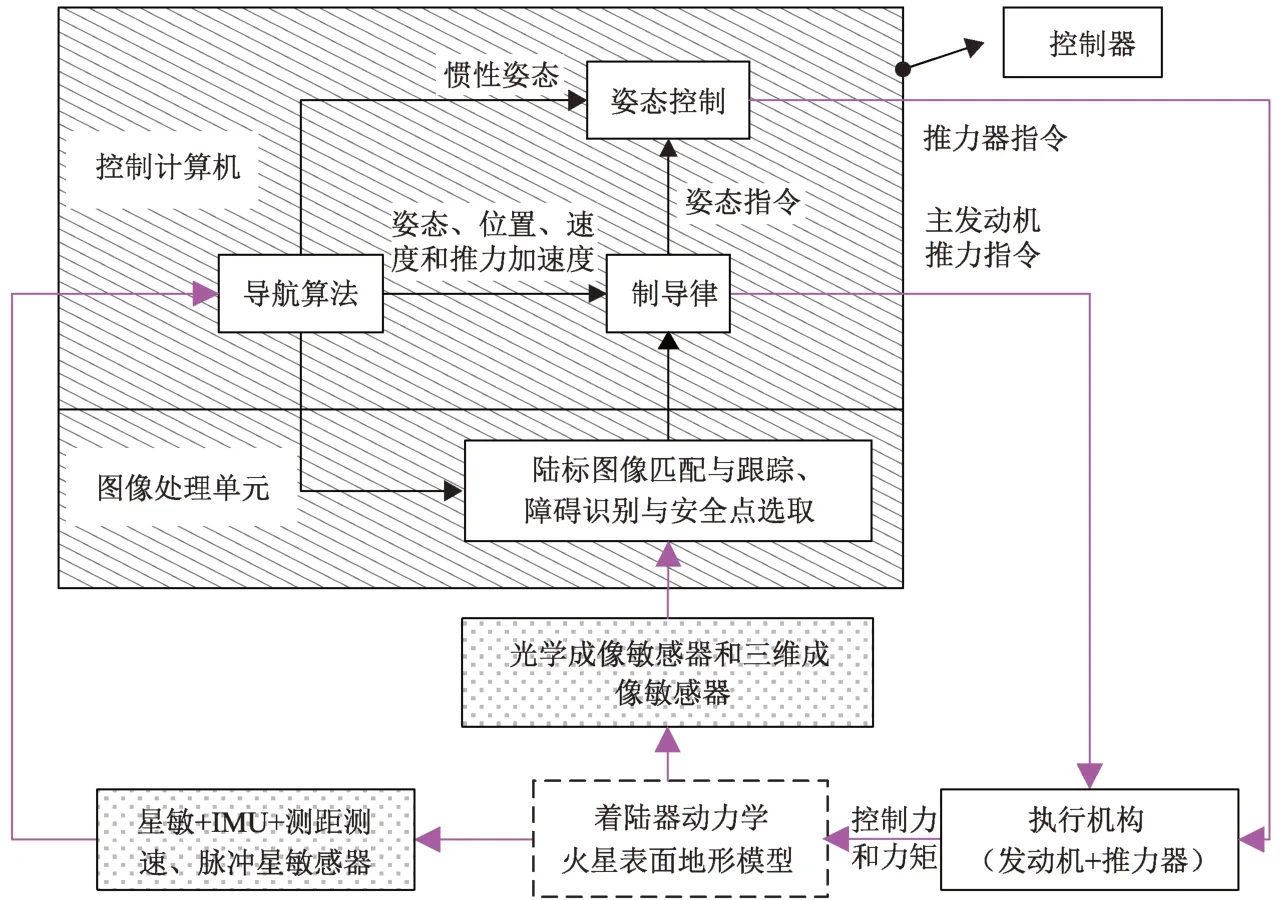
图2 火星精确定点着陆任务自主GNC系统结构Fig.2 The autonomous GNC system architecture for Mars pinpoint landing mission
GNC系统硬件包含敏感器、执行机构和控制器,控制器分为控制计算机和图像处理单元。导航、制导和姿态控制算法在控制计算机上运行;陆标图像匹配与跟踪算法和障碍识别与安全点选取算法[8-9]在图像处理单元上运行。控制计算机和图像处理单元可以进行信息和数据交换。火星定点着陆任务自主GNC 系统的一般工作流程为:导航敏感器进行测量,发送测量数据到控制计算机;导航算法负责处理导航测量数据,将导航结果发送给制导和姿态控制算法;制导算法根据导航结果和制导参数形成主发动机推力指令和姿态指令,将姿态指令发给姿态控制算法;姿态控制算法根据导航结果和姿态指令形成推力器指令;控制计算机将主发动机推力指令和推力器指令分别发给主发动机和推力器,主发动机和推力器完成指令的执行。
对陆标图像处理期间,光学成像敏感器发送火星表面陆标图像给图像处理单元,陆标图像匹配与跟踪算法根据控制计算机发送的导航信息,处理火星表面陆标图像,确定陆标信息,发送给控制计算机,引入到自主导航算法中。障碍检测和规避期间,避障敏感器发送着陆区表面图像给图像处理单元,障碍识别与安全点选取算法根据控制计算机发送的导航信息,处理着陆区表面图像和地形数据,确定安全着陆点信息,发送给控制计算机,引入到制导算法中,完成避障任务。
2 自主导航
2.1 导航陆标的提取与匹配
考虑到探测器在接近火星表面的过程当中,其高度急剧降低,导航相机的可视区域逐渐变窄,类似陨石坑这样的大型区域特征在火星表面分布不均,导致下降过程中可能无法检测到足够多的陨石坑用于导航信息的估计;而火星表面存在着丰富的岩石、高山与沟壑等天然地形,在任何高度下都能够从中提取出大量的角点特征,同时具有非常好的定位特性,可以利用此类特征作为导航陆标。图像特征的描述极大地影响了特征匹配的性能,也关系着导航输出信息的可靠性。一个好的特征描述应该具备不变性(鲁棒性)与可区分性,能够准确地表征特征的相关信息,从而匹配到较多的图像,同时可减少误匹配,提高正确率。由于星载计算机的存储空间有限、计算能力较差,利用图像特征稀疏化表征方法[11]来对提取的导航陆标进行描述,在保证可靠性的同时减小描述子的尺寸、降低处理计算时间;利用汉明距离(Hamming Distance)对两个描述子进行相似性度量,当其小于某一设定阈值时,即视为成功匹配。
根据任务段的不同,把图像处理分为获取图像与图像库的特征匹配(即视觉绝对导航)以及序列图像特征匹配与跟踪(即视觉相对导航)2个部分。对于进入着陆过程的视觉绝对导航,针对图像尺度变化剧烈导致的获取图像与参考地图之间的匹配可靠性低等问题,提出基于多层、多尺度参考地图的导航方法,利用探测器的高度信息估计下降图像的尺度,并在不同的高度区间选取与下降图像具有相近尺度的图层来进行特征匹配,以提高其匹配效率和可靠性。同时利用陆标快速选取方法,以提高图像处理的效率,减少滤波估计的计算量[12]。导航陆标图像处理算法结构如图3所示。
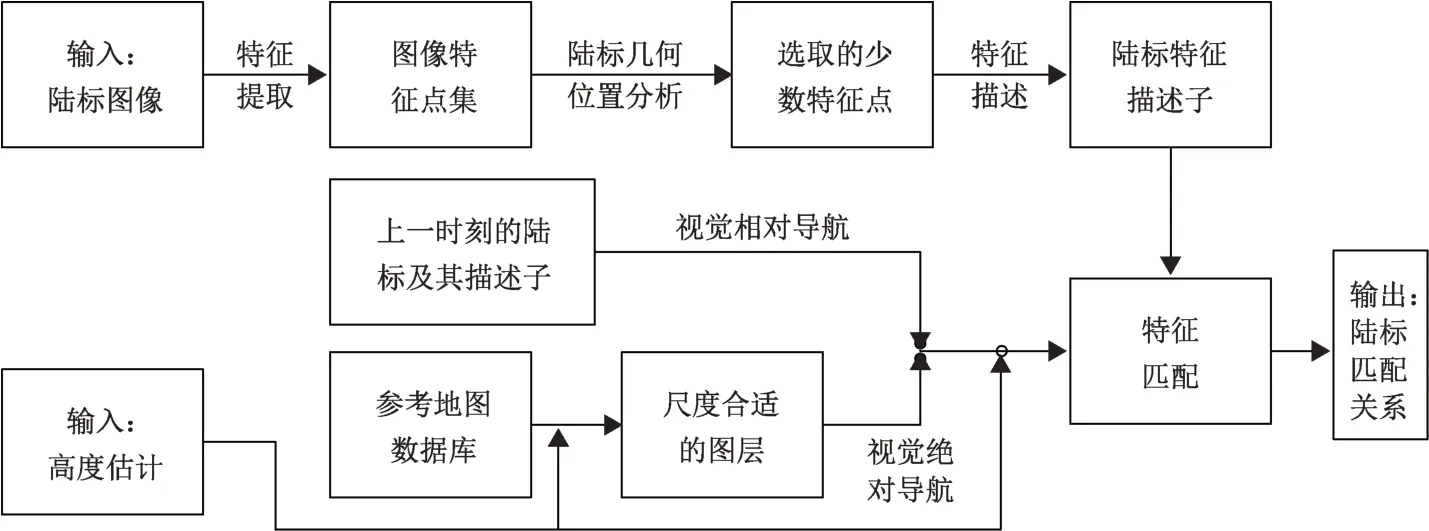
图3 导航陆标图像处理算法结构图Fig.3 The algorithm flow diagram of landmark image process
2.2 基于脉冲星和陆标图像的融合自主导航
进入火星大气前,着陆探测器姿态可由星敏感器确定。为了提高进入点位置和速度的导航精度,在进入火星大气前采用基于脉冲星脉冲到达时间(Time of Arrival,ToA)和火星表面陆标光学图像的融合自主导航方案。针对陆标图像测量和脉冲星ToA测量不同步的问题,提出了基于陆标图像和脉冲星信号的交叉修正、非同步信息融合导航方法(如图4所示),解决了陆标图像和脉冲星的测量周期相差大、脉冲轮廓累积需要先验导航信息等问题,发挥了光学成像导航周期短的优势,兼备了集中式和分布式融合导航的优点,提高了测量信息的利用率、导航精度和可靠性[13]。
基于X射线脉冲星测量和陆标图像测量信息融合的着陆器自主导航方法可归纳为:首先,根据着陆器轨道动力学模型及IMU 测量建立系统状态方程;然后,通过图像处理算法提取着陆器在轨拍摄的火星表面图像中的陆标特征,并与参考陆标特征库进行匹配获取陆标的位置信息,进而根据光学成像模型建立陆标图像的观测方程[14],并根据脉冲星时间转换方程建立脉冲星ToA观测方程;最后,若当前时刻完成了脉冲星信号累计,则采用集中式或分布式信息融合滤波结构或其改进形式,融合火星表面陆标图像测量和X射线脉冲星ToA测量信息实现对着陆器位置和速度的精确估计,否则仅利用陆标图像测量信息对着陆器位置和速度进行导航估计。
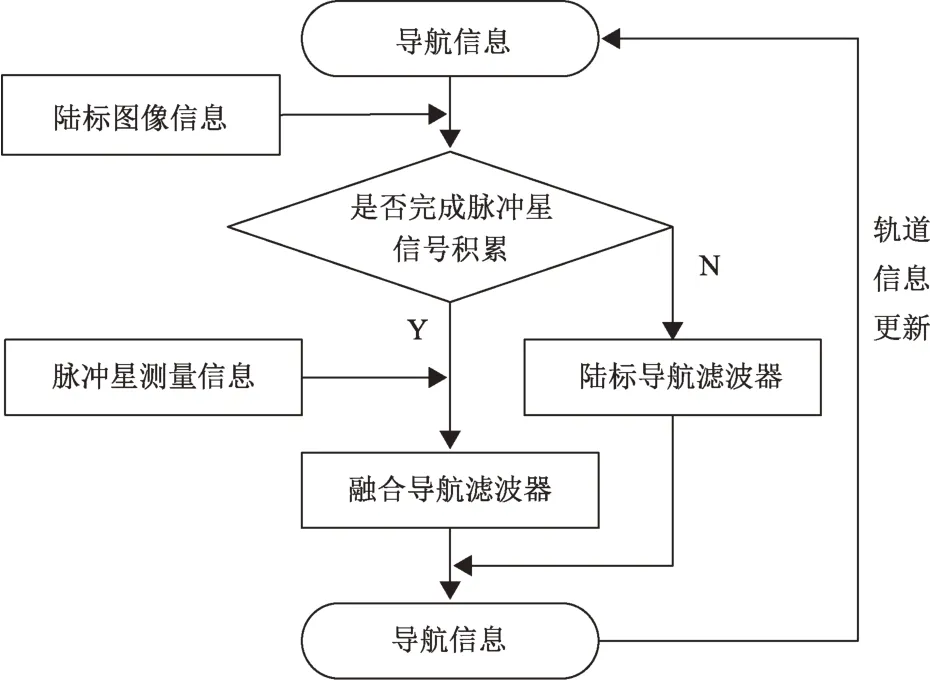
图4 脉冲星+陆标图像高精度融合导航算法框图Fig.4 The algorithm flow diagram of navigation based on X-ray pulsars and landmark image measurements
2.3 基于陆标图像的多信息融合自主导航
针对火星EDL 过程的高精度绝对和相对导航需求,提出了一种基于陆标序列图像、IMU 和测距测速信息的多信息融合着陆自主导航方案,控制结构如图5所示。火星EDL过程中着陆器姿态通过陀螺测量外推及姿态敏感器测量修正获取。当着陆器高度较高时通过提取下降图像中的陆标特征并与参考地形图进行匹配以获取陆标位置信息,进而利用陆标方向测量信息进行绝对定位导航估计着陆器位置和速度。

图5 基于陆标图像的多信息融合自主导航算法框图Fig.5 The algorithm flow diagram of multi-information fusion navigation
当着陆器高度较低时,受参考地图分辨率约束,无法通过匹配下降图像与参考地图获取下降图像中陆标特征的位置信息,不能利用陆标图像进行绝对导航。此时,利用下降图像选取安全着陆点,并通过下降序列图像连续跟踪安全着陆点,结合测距测速信息,实现基于下降序列图像的相对导航,利用着陆器与安全着陆点的相对导航信息避障制导算法给出水平避障机动指令从而实现着陆器高精度避障。采用观测火星表面的坑、岩石和纹理等自然陆标序列图像和惯性、测距测速以及恒星测量,来实现高精度的绝对定位导航和相对位置自主确定,解决了已有着陆导航方法存在的水平位置信息缺失和避障相对位置确定精度有限的问题,实现了完备位置信息的获取。
3 自主制导与控制
3.1 捕获制导与控制
大气进入前的轨道控制目标是进入点状态,捕获制导与控制的思路为利用自主导航确定的轨道精确数值积分递推状态,计算出进入点时B平面误差。判断是否执行修正的条件:若B平面误差小于设定修正阈值,则不启动本次修正;若B平面误差超过设定修正阈值,则执行下一步。计算修正量:首先由中心差分公式计算终端状态变量对控制参数的敏感矩阵,之后计算修正量,用这个修正量来修正初始状态,然后再重新递推残余误差和计算速度脉冲。这样反复迭代到末端状态满足一定的精度。用迭代后状态减去迭代前状态就是实际要执行的速度脉冲[15],控制框图如图6所示。
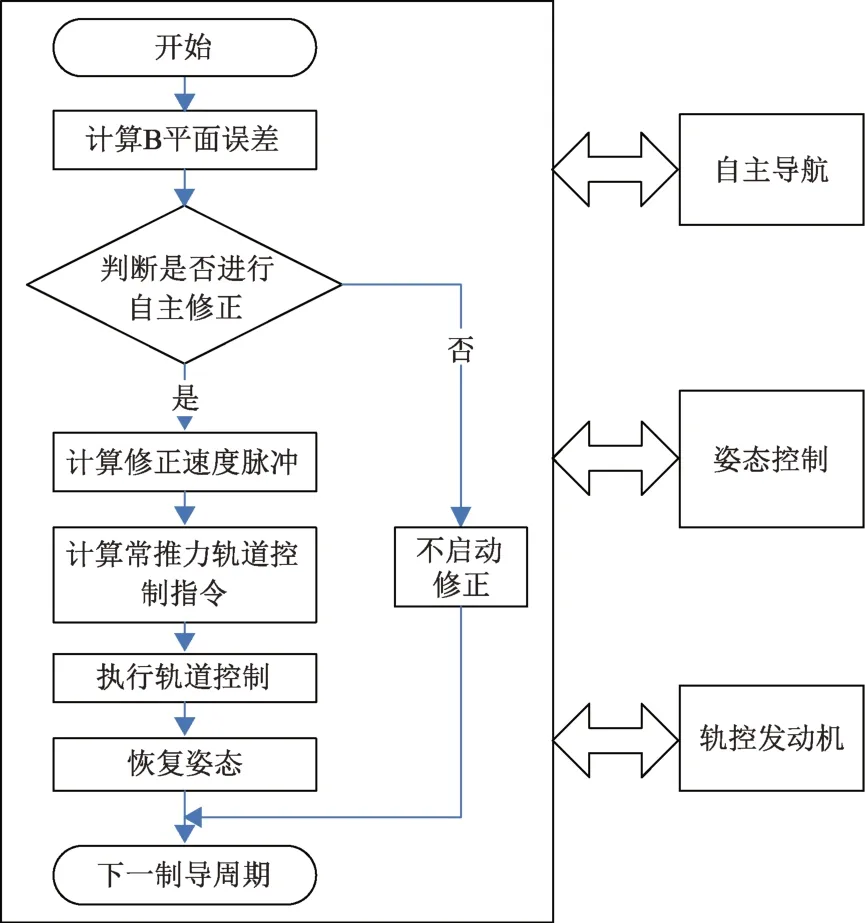
图6 捕获轨道自主制导与控制框图Fig.6 The diagram of autonomous guidance and control for Mars capture orbit
3.2 大气进入制导
针对大气进入过程的高精度控制需求,采用基于标称轨迹的预测校正制导[4],并设计了标称控制系数在线更新流程,如图7所示。
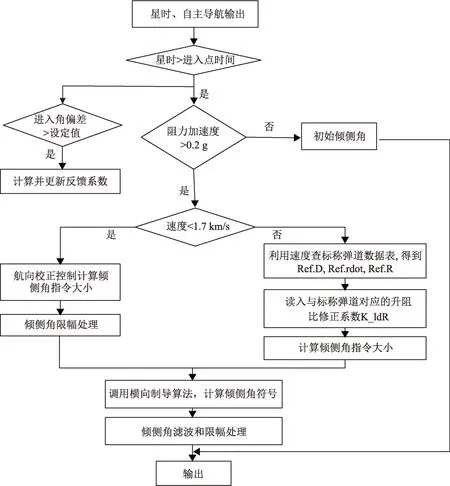
图7 火星大气进入制导律流程图Fig.7 The guidance algorithm flow diagram for Mars atmosphere entry
1)由当前阻力D和高度变化率相对标称轨迹参数的偏差预测待飞航程Rp为

其中:Rref、Dref和分别为参考待飞航程、参考阻力和参考高度变化率,待飞航程由当前状态决定,阻力比参考值偏小,则待飞航程偏远,高度变化率比参考值偏大,则待飞航程偏远。
2)以消除预测的待飞航程与实际待飞航程R的偏差确定控制量为

其中:uref为标称控制量(升阻比);K3为过控系数,这里设为5,用以改善控制的鲁棒性。
3)根据横向约束确定倾侧角指令

其中:ue为估计的升阻比,K2取±1,根据预测的横程偏差方向确定倾侧角变号。
3.3 动力下降和避障制导
针对高精度绝对着陆点位置和粗避障的控制需求,动力减速段采用改进的4次多项式制导律[8]。首先设定期望着陆点位置为绝对着陆点制导目标,利用主发动机和姿态控制实现位置和速度控制,目标是减速并在一定高度到达着陆点上方;然后,到达着陆点上方后开始对相对较大范围着陆区域进行成像,利用图像信息剔除明显危及着陆安全的大尺度障碍获取安全着陆区,将安全着陆点位置设为制导位置目标,实现粗避障,为精避障提供较好的安全点选择区域,避免出现近距离精避障避无可避的风险,整体上提高系统安全着陆概率。
针对高精度的三维和平面图像成像和自主相对避障导航与控制需求,悬停成像段、避障机动段和缓速下降段采用内环与外环相结合的制导方式[8],内环控制利用水平推力器+发动机实现,水平方向采用了位置和速度的相平面控制方式,外环控制利用主发动机和姿态机动实现。悬停成像段主要任务就是对着陆区进行高精度三维成像,精确检测着陆区域的障碍,确定安全着陆点。探测器需要保持悬停状态:速度和姿态角速度足够小,姿态和位置保持不变。悬停状态下利用三维成像敏感器精确观测着陆区,并处理三维图像数据和确定最终的安全着陆点。避障机动段和缓速下降段采用基于序列图像跟踪的高精度相对导航与水平控制,实现高精度的着陆点位置控制。
4 仿真验证
火星探测器初始状态参数设定为火星J2000 惯性系的位置为[-21 121.052,4 300.858,23 462.466]km、速度为[-1 017.020,-394.970,-420.776]m/s,对火星中心定向姿态。初始导航误差为:三轴位置各方向10 km;三轴速度各方向10 m/s;姿态各方向0.1°。导航相机焦距为0.02 m,图像测量噪声0.1 个像素。脉冲星ToA测量精度1 μs。
图8给出了仿真陆标图像特征匹配的结果。利用陆标图像进行绝对导航时,通过在轨拍摄的陆标图像与参考地形库进行匹配,从匹配出的特征点中选取3个陆标特征进行绝对导航。图9给出了进入前探测器位置和速度的导航估计误差,可看出进入前利用脉冲星和陆标图像的融合自主导航方法在进入点位置估计精度优于100 m、速度估计精度优于0.5 m/s,满足火星大气进入前的高精度导航要求。
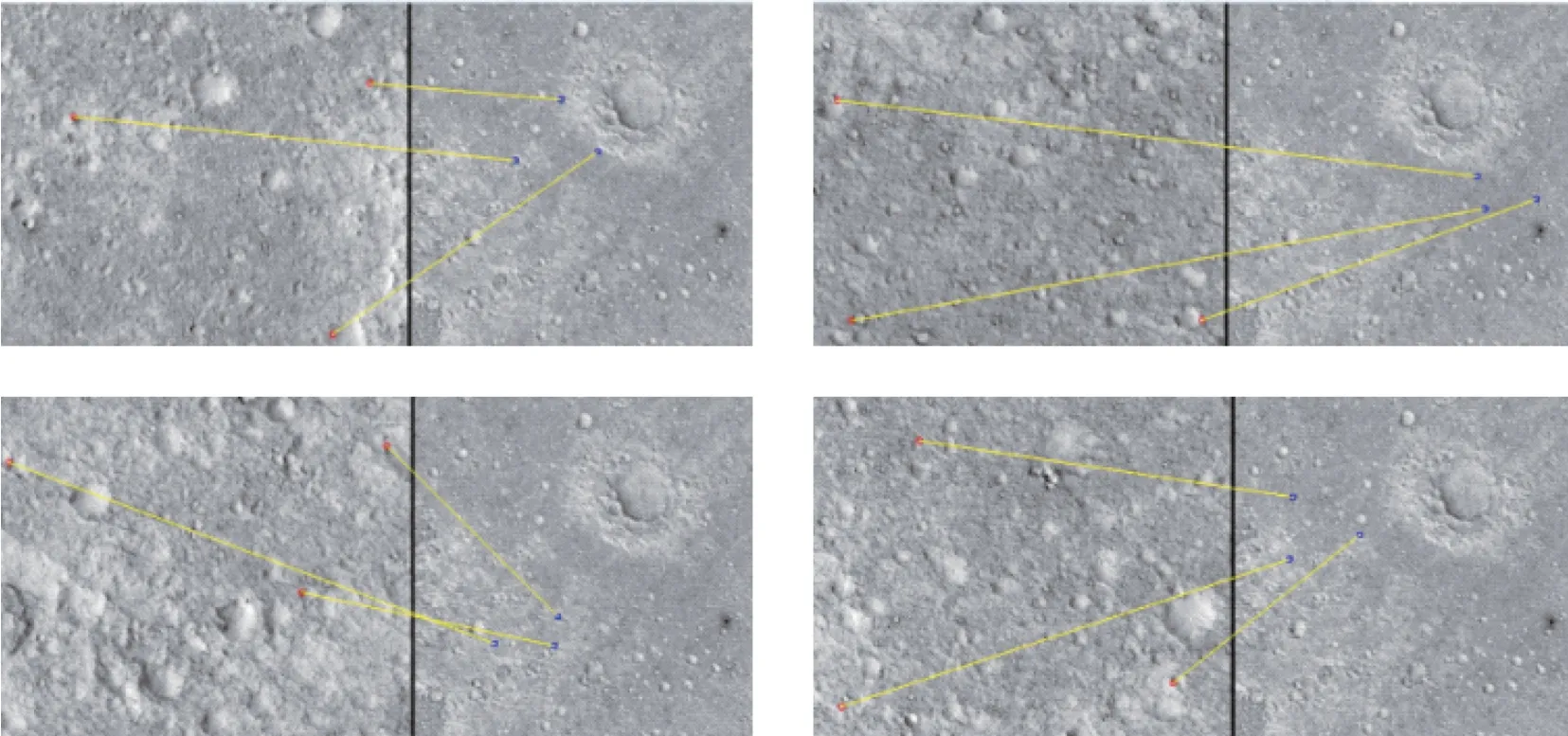
图8 仿真的陆标图像匹配结果Fig.8 The results of landmark image matching
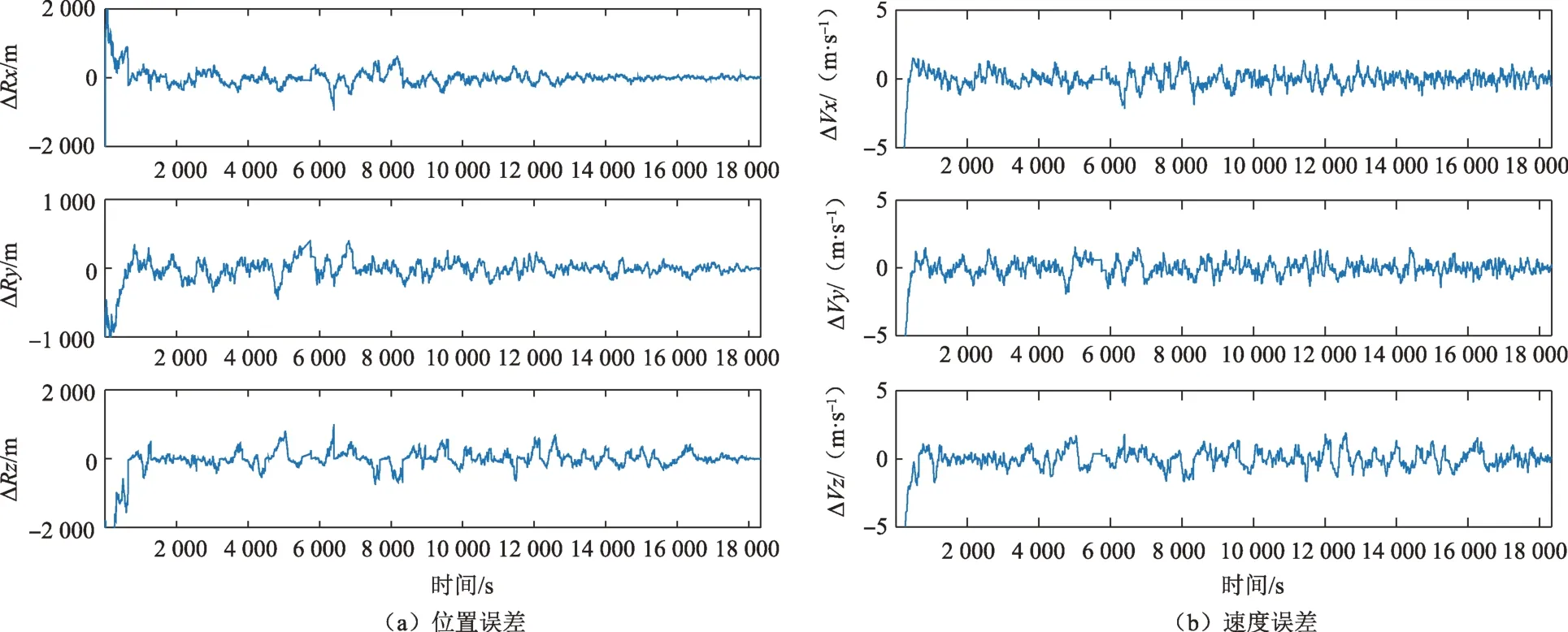
图9 大气进入前位置和速度估计误差Fig.9 The position and velocity estimation error before Mar atmosphere entry
图10~14 给出了EDL 过程探测器导航估计误差及着陆精度和避障精度的仿真结果。由于打开降落伞到抛大底过程中探测器姿态抖动剧烈,该段不进行陆标导航只依靠惯导外推对位置速度进行估计,抛大底后开始引入测距测速敏感器测量对导航进行修正,当高度降低于100 m 之后由于缺少高精度陆标地形库,不再利用陆标图像进行绝对导航,通过跟踪下降图像中的陆标特征进行相对导航避障。由图10 可看出进入后利用陆标图像的多信息融合自主导航方法可保证动力减速段位置估计精度优于10 m、速度估计精度优于0.3 m/s,满足火星探测定点着陆的导航要求。
为了分析火星定点着陆精度,图11给出了探测器EDL 过程中轨迹经纬度的变化,图12给出了EDL过程中探测器在水平方向上距目标着陆点的距离变化,最终着陆精度为17.6 m,满足着陆精度优于100 m的定点着陆要求。图13给出了从100 m高度开始下降序列图像对安全着陆点的跟踪结果,图14给出了探测器相对安全着陆点在天南东系下的位置,通过连续跟踪下降序列图像中安全着陆点最终实现的避障控制精度优于0.5 m。

图11 探测器轨迹经纬度及目标着陆点经纬度Fig.11 The longitudes and latitudes of the Mars lander and the target landing site
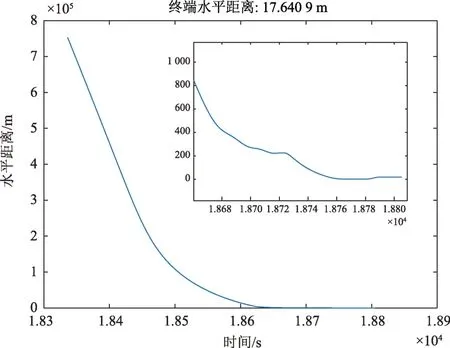
图12 探测器与目标着陆点之间的水平相对距离Fig.12 The horizontal relative distance between the lander and the target landing site

图13 避障过程的图像安全着陆点跟踪Fig.13 The landing site tracking in sequential descent images during hazard avoidance phase
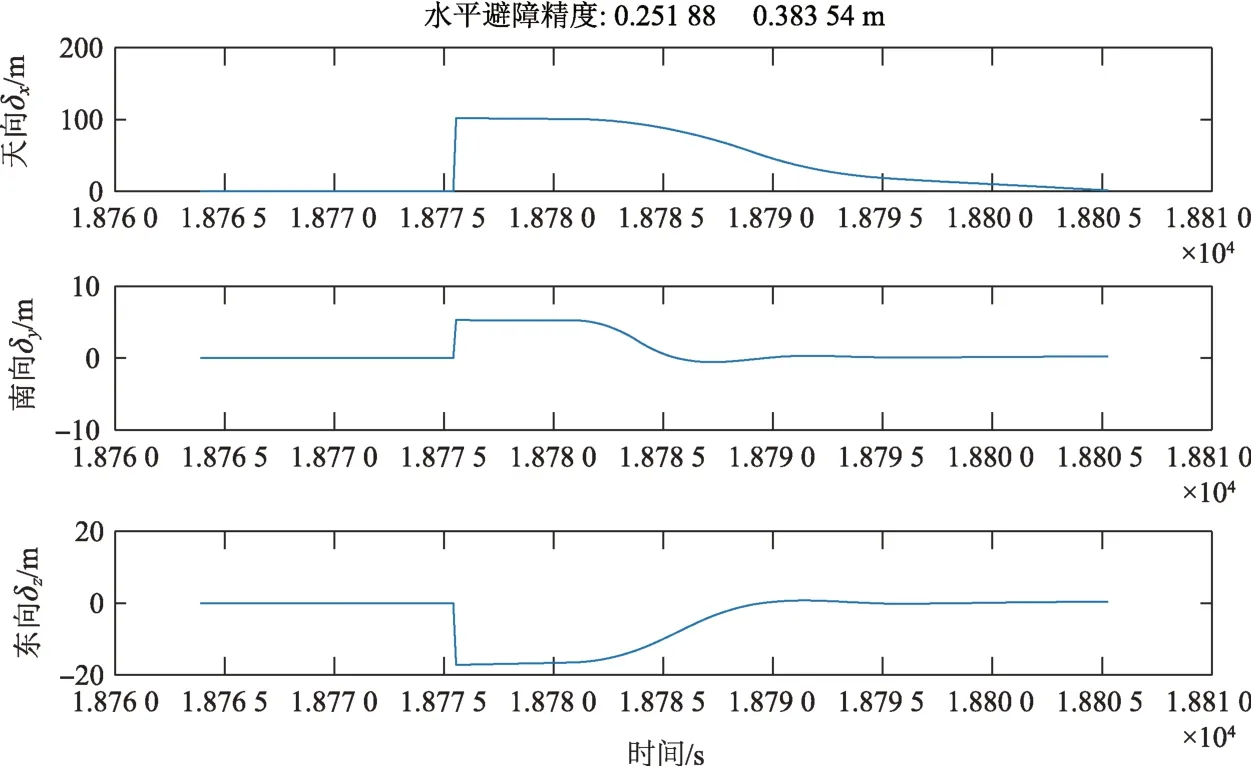
图14 着陆过程的避障精度Fig.14 The hazard avoidance results during Mars landing phase
5 结 论
针对火星定点采样、载人登陆和基地构建等任务的需求,提出了一种火星精确定点着陆自主GNC 方案;基于X射线脉冲星和火星表面陆标图像的融合自主导航方法能够实现大气进入前的高精度导航;基于陆标图像、IMU 和测距测速信息的多信息融合着陆自主导航方法能够实现火星EDL 过程的高精度绝对和相对导航;设计的大气进入和动力下降过程制导与控制算法能够实现精确定点着陆控制。数学仿真结果表明,提出的方案能够实现精度优于100 m的定点着陆和精度优于0.5 m的相对避障控制。
猜你喜欢
英语世界(2022年5期)2022-05-18
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2021年2期)2021-07-21
儿童故事画报·自然探秘(2017年2期)2017-09-26
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年12期)2016-07-18
北京航空航天大学学报(2016年4期)2016-02-27
太空探索(2014年1期)2014-07-10