
多点后方交会测量传递坐标和方位角测量
2019-10-23 09:47陈杰晖郑竹锦
盐城工学院学报(自然科学版) 2019年3期
陈杰晖,郑竹锦
(南京捷鹰数码测绘有限公司,江苏 南京 210019)
随着科技进步,小型盾构逐步在我国市政管道施工建设上应用越来越广泛。与传统的盾构比较,小型盾构克服了传统盾构的诸多缺点。采用小型盾构能很好地处理地下水污染、地面沉降等问题,真正实现因时因地因势进行调整,符合城市市政管道施工建设;此外,小型盾构技术革新快,由于小型盾构因为机身小、成本低,可以根据施工要求进行快速更新换代,提高工作效率;此外小型盾构结合其他施工方法,灵活多变,降低了市政管道管理的成本,提高了使用寿命。当然,由于采用小型盾构,为了节约工程造价,相应的盾构井也越做越小,这就也测量工作带来许多不利的因素。本文结合某过江电力隧道工程的小型盾构的施工测量实践,就其中涉及到的联系测量的若干问题[1-3]进行探讨和分析。
1 工程概况
某过江电力隧道110 kV江岛变电站电源进线土建工程(110 kV输变电过江标段),建设规模为4回220 kV及2回110 kV,采用江底隧道过江,长度约0.78 km,外径4 000 mm,壁厚250 mm,埋深约36 m,工程采用圆形盾构工艺施工。
2 联系测量
根据工程交底文件,本工程业主委托设计院提供了5个导线点坐标(K1~K5),经复测坐标相差较大,不利于贯通,会同业主、设计商定,并考虑到现场江心洲井口已经施工,调整江对面控制点坐标作为贯通测量控制点成果。并在夹江两岸各设一个相互通视的观测墩,同精度联测该两点获得坐标。
2.1 联系测量方案
本项目地质条件复杂,属于长江冲积河漫滩,地下水丰富,在盾构井施工阶段,多次发生塌陷、地下水涌出等情况,为了保证施工安全,在盾构井最后5~10 m的开挖施工时,采用了冻结法施工,此时,需要将地面控制点坐标传递到竖井下,由于场地狭小且冻结法施工时管道众多,无法采用传统的导线直传、两井定向或挂钢丝法(无法悬挂)。经多次实验后采用了一种多点后方交会的方法传递坐标和方位角,具体方法如图1所示。即在竖井周围测站点T1能观测到的位置设置3个5 kg重锤(尽可能均匀设置,离开井壁约0.15 m),下部放置在油桶内并悬空。测量时首先在井口T1设站观测井壁边这些点的坐标,然后到井下再次测量钢丝获取测站点的坐标。
2.2 测量与精度预估
设站点离开井口的距离大约是60~80 m,在T1点设站,用徕卡TS30观测4个测回的角度和距离(悬挂点上放贴片)。井下在可设站的任意位置设站(尽可能考虑到悬挂钢丝点的位置夹角和距离均匀),观测4个测回的角度和距离计算测站点坐标和方位角。
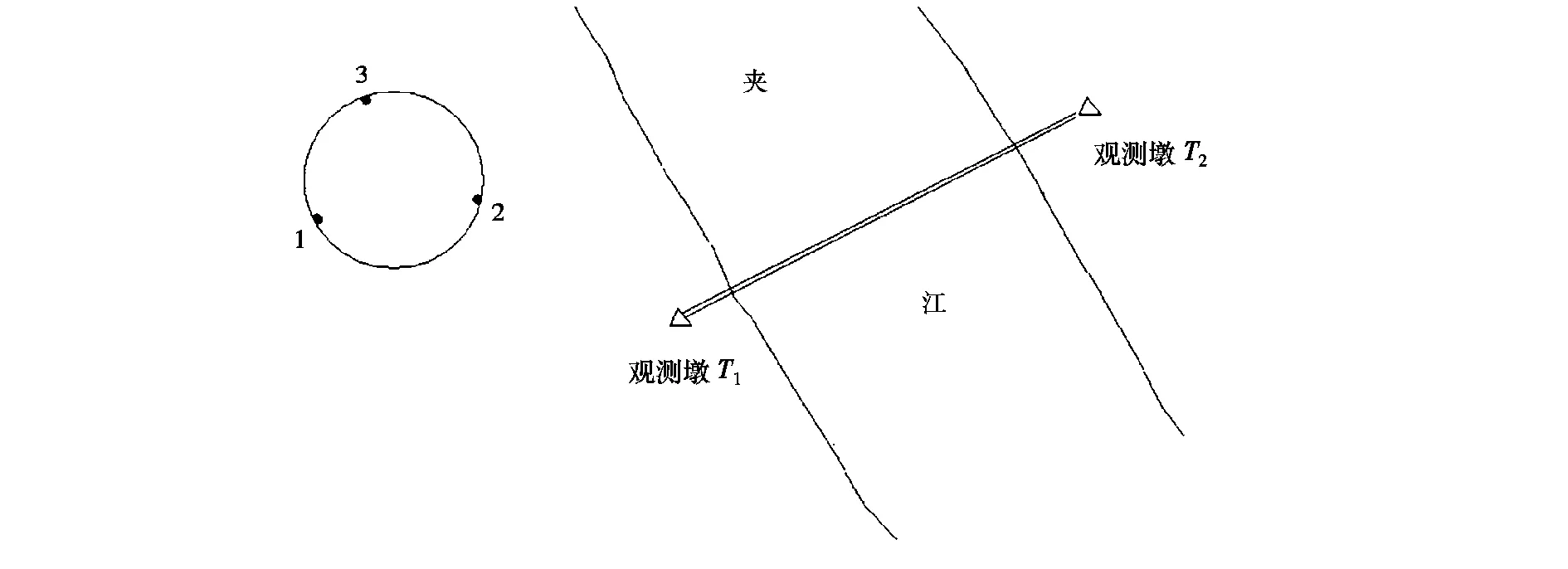
图1 联系测量示意图Fig 1 Sketch map of contact measurement
井口点坐标测量的精度为
(1)
考虑到施工环境影响,4个测回角度观测中误差mβ=±0.5″,距离测量精度按最不利情况考虑,可设ms=±1.0 mm。此时,计算得到井口点的坐标中误差为
由于井下采用角度和距离观测,n=6,t=2,r=4,可采用间接平差法计算待定点坐标。计算步骤是先计算待定点近似坐标;然后列出误差方程式;组成法方程并解算[4-5]。
V=BX-L
(2)

(BTPB)X-BTPL=0
X=(BTPB)-1BTPL
(3)
验后单位权中误差:
(4)
鉴于本项目场地较小,测距精度基本相当,这样可事先计算出法方程系数项并得到协因素阵

方向中误差可用如下公式近似计算
也就是说,这样的方法传递坐标精度是有保证的,但用来传递方位角,其精度达不到规范的要求。但是如果仅用于盾构初始姿态定位等项工作,由于距离短,一般为20 m左右,方位传递误差的影响经计算不大于1.5 mm,不影响定位精度。
为解决方位传递的精度问题,采用了Leica最新的Leica TDRA6000激光全站仪(测角±0.5″,测距0.25 mm)来进行短边距离测量,经试验,地面井口点的测量精度约为

3 结语
盾构法施工中,坐标及方位角传递始终是一个关键点,越是小型化的盾构,测量的难度越大,随着高精度测量新仪器设备的使用,原来传统的方法可能不再适用于新情况,这就需要测量工作人员在不同的工作环境下选择有效、简便、满足精度的方法或根据测量基本原理创造新的方法和技术来满足越来越复杂的工程需要。
猜你喜欢
结构工程师(2022年2期)2022-07-15
建材发展导向(2021年11期)2021-07-28
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
现代工业经济和信息化(2016年22期)2016-08-23
中国房地产业(2016年9期)2016-03-01
船海工程(2015年4期)2016-01-05
思维与智慧·下半月(2015年11期)2015-11-24
中国工程咨询(2015年9期)2015-02-25
