鹊桥卫星激光测距时间窗口及测距成功概率分析*
2019-10-23 01:12高清鹏李春晓李荣旺段建锋李语强
天文研究与技术 2019年4期
高清鹏,李春晓,李荣旺,段建锋,李语强
(1. 中国科学院云南天文台,云南 昆明 650011;2. 中国科学院大学,北京 100049;3. 中国科学院空间目标与碎片观测重点实验室,江苏 南京 210034;4. 北京航天飞行控制中心,北京 100094)
鹊桥卫星(嫦娥四号中继星)于2018年5月28日在西昌卫星发射中心成功发射,主要用于实现嫦娥四号着陆器与地面站的通信和数据传输。鹊桥卫星运行在地月系L2点晕轨道,斯坦福大学FARQUHAR[1-3]于20世纪70年代在月球背面探测的研究过程中,发现地月系L2点附近存在三维晕轨道,该轨道利用飞行器在地月系L2点运行可实现月球背面与地球的通信和数据传输。文[4]对地月系L2点附近轨道进行分析,结果表明,Lissajous轨道在月球背面探测中继任务过程中存在月球遮挡问题,一颗中继卫星无法满足中继通讯任务。文[5-6]通过对鹊桥卫星任务轨道进行分析,采用晕轨道,可避免月球遮挡问题。
当月球背面处于月夜的时段,鹊桥卫星中继任务暂停,鹊桥卫星上装有中山大学自主研制的中空激光角反射器[7]。鹊桥卫星中继任务暂停时段可以调整卫星姿态,使得鹊桥卫星上的中空激光角反射器正对地球,昆明站可以开展鹊桥卫星激光测距试验。2018年1月,云南天文台在国内首次实现了月球激光测距[8],即将对鹊桥卫星开展激光测距试验,因此有必要对鹊桥卫星轨道特征进一步了解,同时基于云南天文台现有技术平台开展鹊桥卫星激光测距的成功概率和可行性分析计算,为后续开展鹊桥卫星激光测距试验提供参考。
1 鹊桥卫星轨道特征分析
对于地月系深空探测器而言,通常采用圆型限制性三体模型,坐标系为地月会合坐标系。第三体航天飞行器运动的动力学方程为[9]
(1)
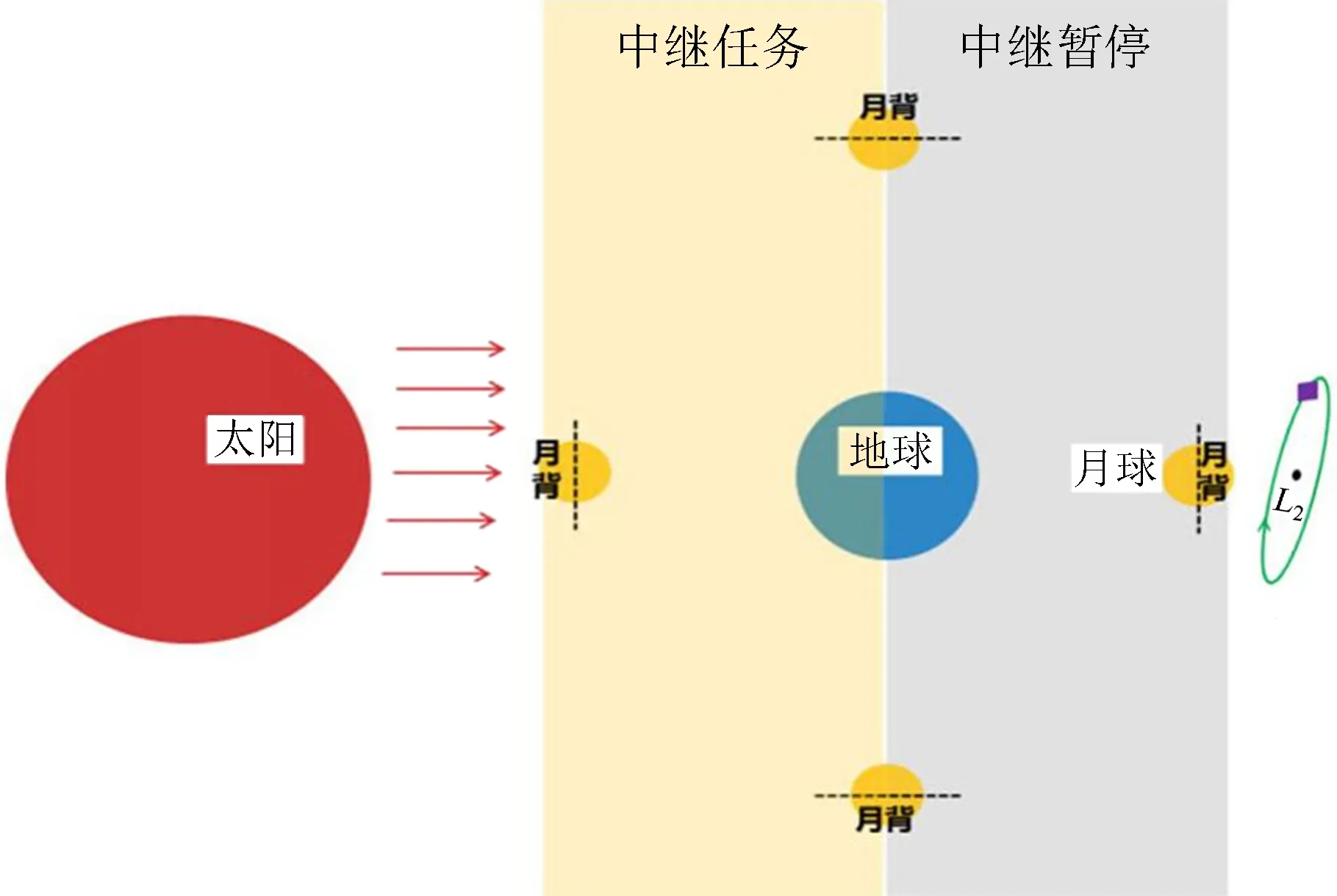
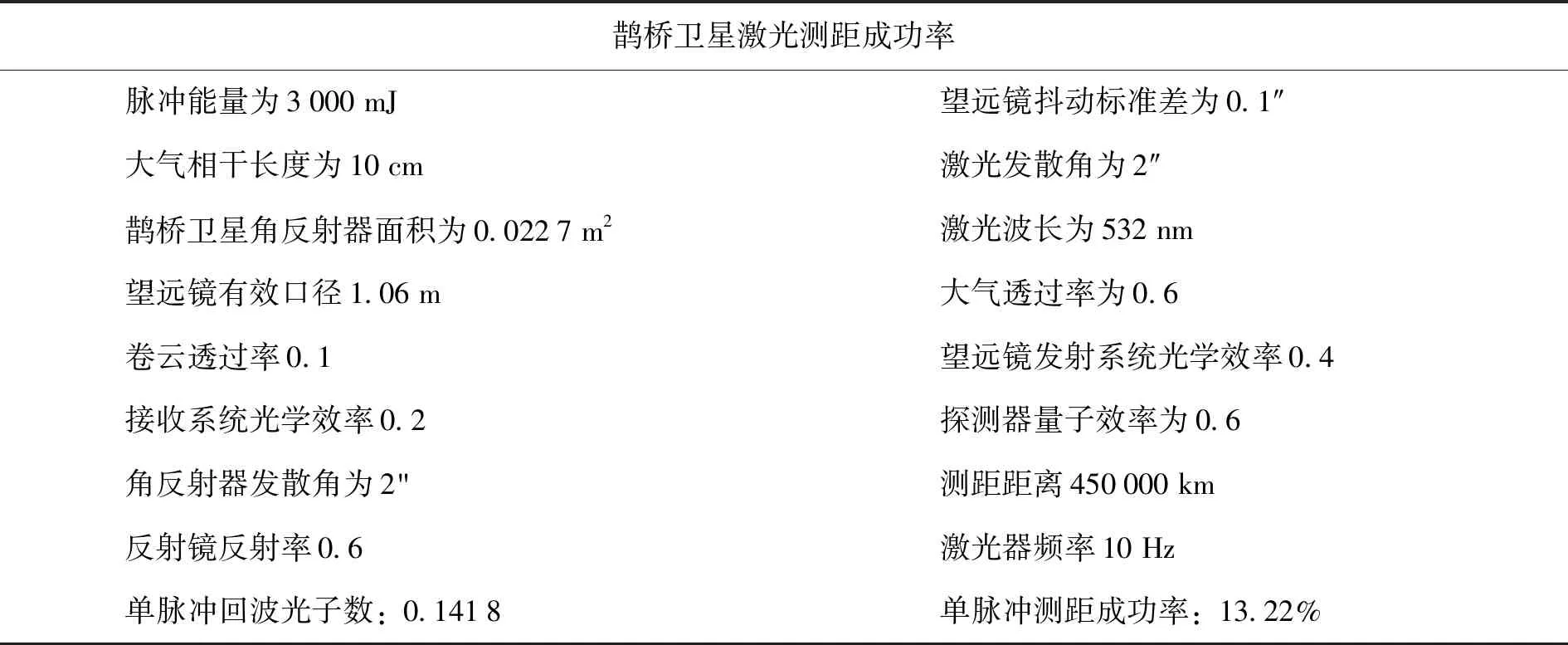
欧拉和拉格朗日分别发现,在三体问题中存在三个共线平动点和两个三角平动点,通过计算可得L2平动点位置:L2=(1.155 701 64, 0, 0),对应的雅可比常数为CL2=3.172 200 43。对于L2点鹊桥卫星,其能量[10]满足C 鹊桥卫星的运动轨道特征对激光测距分析有指导意义,在没有得到准确的鹊桥卫星轨道参数的情况下,有必要对鹊桥卫星目标轨道进行分析并计算出一条接近探测任务的轨道。在t0时刻,初值估计 图1 地月系L2点附近z方向振幅为12 021 km的晕轨道(以一个地月距离为单位) Fig.1 The halo orbit with an amplitude of 12021km in thezdirection near theL2point of the Earth-moon system (In terms of an Earth-moon distance) 通过计算得到一条轨道周期为14.78天的晕轨道,轨道的雅可比积分常数C=3.146 349 82。该轨道对月球探测器和地面测控站具有良好的覆盖性,可作为一条近似中继任务的目标轨道。 在地月系L2点的鹊桥卫星,其运行轨道为弱中心引力轨道,飞行器受摄动扰动较为明显[14],观测目标受摄动扰动后对望远镜观测和跟踪都产生影响。为了分析望远镜对观测目标的跟踪和指向精度问题,下面给出晕轨道的速度和晕轨道附近的不变流形。 晕轨道的速度如图2。对图2中Vx-Vy平面,在Vx为0处看似不平滑,为此图3给出速度随时间的变化。由图3可以看出,速度随时间的变化是连续的。晕轨道附近的稳定流形如图4。 目标轨道运行速度对望远镜观测和跟踪目标会有影响,不变流形计算可为望远镜搜索目标提供指导。 图2 晕轨道在各方向的速度大小(单位为无量纲化单位) Fig.2 Velocity of halo orbit in all directions(in units of dimensionless units) 图3 晕轨道速度随时间的变化 图4 地月系L2点晕轨道附近靠近月球和L1点的稳定流形 在月球公转和自转周期相近的情况下,月球背面始终背离地球,在月球处于背离太阳的月夜时段,月球背面表面温度低至-190 ℃,探测器的电子器件无法在这样的低温条件下正常工作,每个阴历月有将近14天的时间嫦娥四号卫星为休眠状态,鹊桥卫星相对地月的位置及工作状态如图5。在休眠时间段内鹊桥卫星可以调整姿态使激光角反射器正对地面,此时,云南天文台1.2 m望远镜可以对鹊桥卫星开展激光测距试验。 激光测距的可观测时间段需满足以下条件: (1)当月球背面处于月夜的情况下,嫦娥四号探测器处于休眠状态,每个月球相位周期内的可观测时间段为上弦月-满月-下弦月,即每阴历月8~22日左右。 (2)太阳高度角需要在0°以下,即观测站处于晴朗无云的夜晚才能进行观测,考虑到大气折射等因素,计算中太阳高度角取-5°。 (3)根据激光测月观测中积累的经验,鹊桥卫星的高度角在大于45°时,测距受大气折射、散射、衰减等环境因素影响较小,并且每晚连续可观测时段需大于2小时,以满足激光测距回波信号的积累。 (4)观测时间需避开雨季。 图5 太阳、地球、月球和鹊桥卫星目标轨道相对位置示意图 Fig.5 Schematic diagram of the relative positions of the sun、earth、moon and Magpie bridge satellite orbits 综合以上条件计算出2019年下半年云南天文台可以开展鹊桥卫星激光测距观测的时刻如表1。 表1 2019年下半年云南天文台鹊桥卫星激光测距观测时刻表Table 1 Timetable of Magpie bridge satellite laser ranging of Yunnan Observatories in the second half of 2019 在鹊桥卫星激光测距中,探测器接收到的回波光子数N可表示[11,15]为 (2) 激光测距成功率表示为 ζ=1-e-N, (3) 其中,N为单脉冲回波光子数;E为激光脉冲能量;h为普朗克常数;f为激光频率;R为激光反射器与测距台站的距离;AS为反射镜反射截面积;AR为望远镜有效接收截面积;θ1为反射镜发散角;θ2为激光光束发散角;Tr为接收系统光学效率;Te为发射系统光学效率;Ta为单程大气透射率;Tc为卷云透过率;ρ为反射镜反射率;Q为探测器效率;α为衰减率。 由于激光测距回波光子数和距离的四次方成反比,因此,随着距离的增加,能探测到的回波光子数急剧衰减,测距的距离对成功率有重要影响。对前面模拟的晕轨道计算,在可观测的时间段内航天器目标轨道到云南天文台1.2 m望远镜的距离约420 000~465 000 km。 假定观测中望远镜准确指向观测目标中心,即轨道预报偏差为0的情况下,计算鹊桥卫星测距的回波光子数和测距成功率见表2。 表2 鹊桥卫星激光测距回波光子数和测距成功率Table 2 Magpie bridge satellite laser ranging echo photon number and ranging success rate 以上是在望远镜指向精确的理想情况下计算鹊桥卫星测距回波光子数和测距成功率,在实际观测中,轨道预报的横向标准差精度对测距有很大影响,只有在望远镜准确指向目标时,望远镜才能收到观测目标角反射器反射回的信号,望远镜指向不准时较难测到回波信号。 根据激光测距过程中积累的经验,要使望远镜准确指向目标,可通过两种方法改进:(1)通过多种手段联合定轨并实时修正轨道预报参数等方式提高轨道的预报精度;(2)对望远镜的指向模型进行改善提高,使望远镜对目标的指向精度更高,从而减小由望远镜指向偏差带来的预报偏差。 除了望远镜指向精度影响激光测距外,观测站到鹊桥卫星的距离变化也对测距成功率有明显影响,假定在预报准确的情况下,在鹊桥卫星与观测站的较近距离处进行激光测距比在较远距离处进行测距其成功率可提升40%左右。鹊桥卫星激光测距回波光子数和测距成功率随测距距离的变化如图6。通过对图6分析可明显看出,激光测距成功率随测距距离的增大明显降低。 根据月球的运动周期,一个阴历月的月球周期约为29.53天,而目标晕轨道的周期约为14.78天,目标晕轨道的两个周期与月球的一个相位周期近似相等,因此通过目标轨道一次相位调整就能满足较长时间内鹊桥卫星激光测距处于较为理想的状态。目标轨道相位调整分两种情况分析:(1)在目标距离昆明站最近时,目标轨道距离月球质心约45 500 km,在距离地面站最近时从地球看月球表面与鹊桥卫星的z方向垂直视距离约8 200 km(到月球质心为8 200 km + 1 737 km)。假设满月时月球的反射光对鹊桥卫星激光测距无影响,根据表1给出的鹊桥卫星激光测距观测任务时刻表,通过调整轨道相位使观测距离最近时运行轨道对应表中可观测时长在最长的时间段附近,最有利于做鹊桥卫星激光测距试验,此时即为较理想状态下的观测;(2)借鉴月球激光测距的经验,当满月时,月球被太阳照射的反射光对月球激光测距影响较大,处于满月状态时比较难进行月球激光测距。在鹊桥卫星激光测距时,月球的反射光对鹊桥卫星测距出现较为明显的影响时,可以通过调整轨道相位使鹊桥卫星运行轨道的最近距离时间段与观测任务时刻中的上半月即阴历月9~12日相对应,这样即认为在满月时,月球反射光对鹊桥卫星激光测距影响较大情况下较为理想的观测状态。 图6 假定轨道预报横向偏差为0时,测距回波光子数和测距成功率随测距距离的变化 Fig.6 Assuming that the lateral deviation of the orbital prediction is 0, the number of photons of the ranging echo and the success rate of the ranging vary with the observation distance 由于在测距最近距离时鹊桥卫星与月球质心的距离约为45 500 km,并且月球被太阳照射的反射光始终背离鹊桥卫星,在实测之前可优先选择方案一试验,之后再根据实测情况确定是否需要调整。望远镜性能短时间内无法提升,并且轨道预报的精度无法进一步改善时,在鹊桥卫星任务和燃料允许的情况下可以通过相位调整使鹊桥卫星运行轨道处于地面最佳观测状态,也可以提高测距成功率。 云南天文台鹊桥卫星激光测距系统目前进入准备工作状态,但由于观测时间窗口等问题还没有开展实测试验。为了验证理论计算的可靠性,设计了等效验证试验。等效模拟鹊桥卫星激光测距的依据是根据激光测距的关键因素测距回波光子数和测距成功率,通过控制测距系统的相关参数使所选取的等效实测试验目标的测距回波光子数和测距成功率与鹊桥卫星激光测距理论计算值相同或相近。 开展模拟试验的观测系统和鹊桥卫星激光测距系统一致,所以观测系统的相关参数不变(见表2),观测中的变量有激光角反射器的反射率和有效反射面积、测距距离、角反射器反射镜面的发散角,控制变量选择激光能量,即通过控制测距系统激光器的激光能量使测距回波光子数和测距成功率相同或相近,以达到等效模拟的效果。 在选择目标时,选择轨道高度约为36 000 km的地球同步卫星及距离约为384 000 km的月面反射器作为等效试验目标,其相关变量参数及测距成功率理论计算如表3。 表3 测距回波光子数和测距成功率理论计算Table 3 Theoretical calculation of the number of ranging echo photons and ranging success rate 图7为Compassi5激光测距中接收到的回波信号。通过对Compassi5进行实测,181 s探测到1 004个回波信号,计算可得对Compassi5实测的平均单脉冲测距成功率为55.47%。 图7 Compassi5激光测距实测到的回波信号 对Apollo15角反射器进行实测,回波信号如图8。通过对Apollo15进行实测,590 s探测到136个回波信号,计算可得月球激光测距实测的平均单脉冲测距成功率为2.31%。 激光测距理论计算与实测结果对比如表4。通过对实测试验和理论分析计算进行对比可以看出,理论计算与实测结果存在一定偏差,主要包括多次重复脉冲测量时存在效率下降、望远镜系统误差、大气透过率和卷云透过率选取参数偏差,望远镜发射效率和接收效率取值偏差,角反射器反射率等参数取值偏差所致,目前还不能准确地确定这些偏差。 虽然理论分析计算和实测结果存在一定的偏差,但是通过理论计算和实测结果进行对比分析表明,鹊桥卫星激光测距理论计算回波光子数和测距成功率比月球激光测距更高,现在已经实现月球激光测距,所以有望实现测距成功率更高的鹊桥卫星激光测距。该研究可以为后期鹊桥卫星激光测距提供参考,为后续实验的开展提供理论依据。 图8 月球激光测距中探测到的Apollo15角反射器回波信号 表4 测距成功率理论计算与实测对比Table 4 Comparison of theoretical calculation and actual measurement of ranging success rate 鹊桥卫星激光测距是我国首次开展的超过地月距离的激光测距,激光测距本身较高的精度特性对开展高精度轨道定轨有重要价值,同时鹊桥卫星激光测距技术对于开展深空激光测距及激光通信等关键技术的研究有积极作用。在没有得到鹊桥卫星轨道参数的情况下,计算了近似任务目标的运行轨道,分析了鹊桥卫星激光测距成功的概率,并给出激光测距的观测时间窗口。最后在未开展鹊桥卫星实测的情况下,设计等效验证方案通过实测结果来验证理论计算的可靠性,为鹊桥卫星激光测距试验的开展奠定基础。



Fig.3 Halo orbital velocity changes with time
Fig.4 Stable manifold near the lunar andL1points near the lunar orbit ofL22 鹊桥卫星激光测距的时间窗口

3 测距成功概率分析

4 理论计算可靠性验证
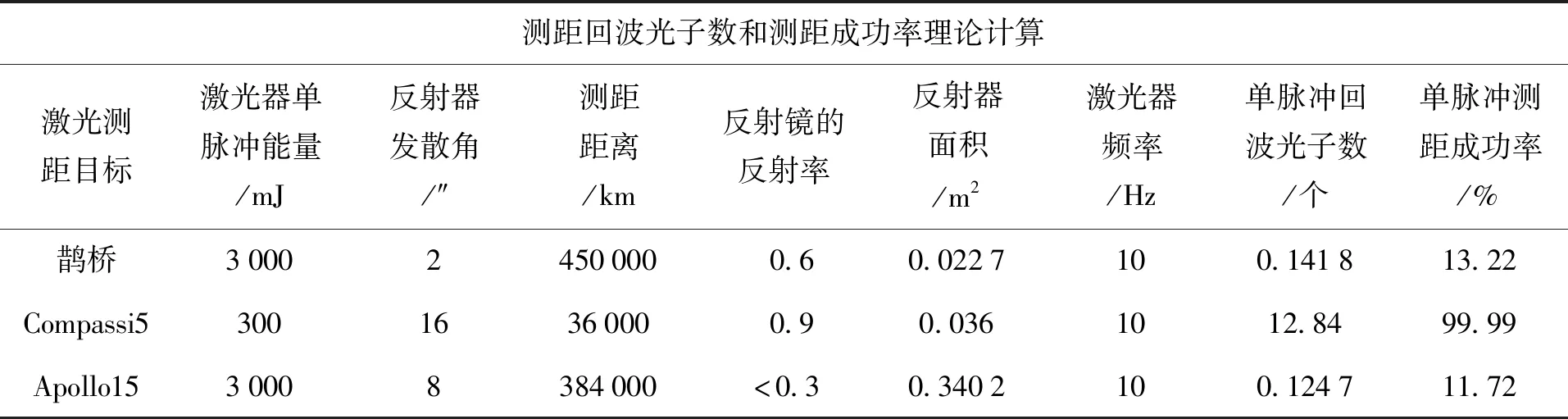
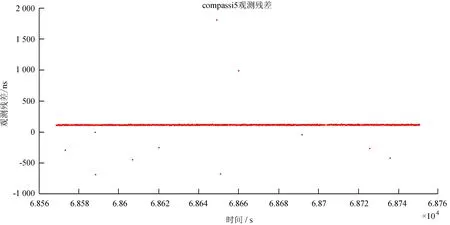
Fig.7 The echo signal measured by Compassi5 laser ranging
Fig.8 Apollo15 angle reflector echo signal detected in lunar laser ranging
5 总 结
猜你喜欢
导航定位学报(2022年4期)2022-08-15
科学(2020年3期)2020-01-06
环球时报(2019-08-07)2019-08-07
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
火花(2015年8期)2015-02-27
太空探索(2014年1期)2014-07-10