
惯性导航技术的新进展及其发展趋势
2019-10-21 08:33任赐杰
科学大众 2019年4期
任赐杰
摘 要:惯性导航技术自20世纪30年代被提出以来得到迅速发展,惯性导航系统和相关传感器元器件技术不断完善。人们希望进一步提高系统的可靠性,从而降低成本、提升导航性能。惯性导航系统向着小型化、功能化的方向发展,文章主要针对惯性导航技术进行分析,在解析惯性导航技术发展历程的基础上,分析惯性导航技术设计与应用的影响因素,提出惯性导航技术未来的应用领域和发展趋势。
关键词:惯性导航技术;应用领域;发展趋势
惯性导航技术作为一项综合性技术,不仅涉及精密机械、微电子等学科,还涉及计算机技术、自动控制技术以及光学、材料等领域。近年来对惯性导航技术的需求急剧增长,计算机技术、传感技术、自动化控制技术的发展也为惯性导航技术发展提供了基础,推动惯性导航技术不断发展。
1 惯性导航技术发展历程
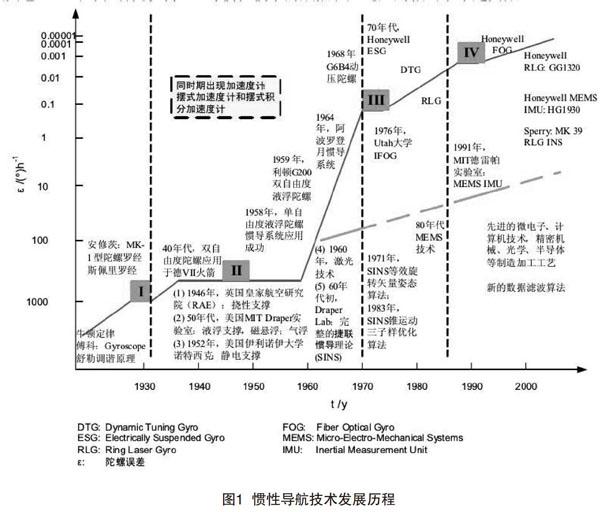
惯性导航技术发展分为4个阶段,具体历程如图1所示。
1.1 第一代惯性导航技术
20世纪30年代之前的惯性导航技术属于第一代惯性导航技术范畴。1687年,惯性导航技术在牛顿三大定律的基础上发展起来,1852年,人们第一次提出陀螺的概念,分析了其原理并对其应用进行了展望。1908年,安修茨(Hermann Anschütz-Kaempfe)研制出摆式陀螺,这也是第一台该种类型仪器。1910年,舒勒(Max Schuler)进一步发展惯性导航技术,提出调谐原理。第一代惯性导航技术的发展为整个惯性导航系统建设奠定了基础。
1.2 第二代惯性导航技术
20世纪40年代第二代惯性导航技术是和火箭发展同步兴起的,其不再局限于单纯的惯性导航技术,随之,惯性导航系统出现。惯性导航技术最早应用于德国V-II火箭,这也是惯性导航技术的首次应用。20世纪50年代中期,0.5 n mile/h的单自由度液浮陀螺平台惯导系统被提出并研制成功。经过20年建设,0.005 ?/h的G6B4型动压陀螺于1968年提出并研制成功。在技术理论研究方面也取得了重大突破,典型代表是支承悬浮技术和激光技术(1960年)、捷联惯性导航(Strapdown Inertial Navigation System,SINS)理论,这些技术和理论基础的发展均为惯性技术发展奠定了基础。
1.3 第三代惯性导航技术
20世纪70年代,新型加速度计、陀螺仪的出现推动了新型惯性导航系统(Inertial Navigation System,INS)的兴起,正式进入第三代导航技术,新型惯性导航设备和技术不断发展要求进一步提高INS性能。这一期间各种类型的陀螺发展理论提出,不同陀螺具有不同特征,静电陀螺(Electrostatic Gyroscope,ESG)漂移达10~4 ?/h,动力调谐陀螺(Dynamic Tuned Gyroscope,DTG)具有体积小、结构简单的特征,漂移量级可达0.01 ?/h,环形激光陀螺(Ring Laser Gyro,RLG)和干涉式光纤陀螺(Interferometric fiber optic gyroscope,IFOG)主要应用于民航领域。另外,以粒子陀螺、超导体陀螺以及固态陀螺为代表的新兴陀螺儀表也开始出现并逐渐得到应用。在20世纪80年代半导体技术发展的背景下,微机电系统(Micro Electro Mechanical Systems,MEMS)开始兴起。
1.4 第四代惯性技术
新型惯性技术(21世纪)作为第四代惯性技术发展阶段,具有高可靠性、高精度、小型化、数字化、低成本的特征,新型惯性技术的发展推动了导航系统的进一步发展。陀螺仪精度不断提高,新型固态陀螺仪也不断成熟,具有代表性的RLG,FOG,MEMS等新型固态陀螺仪的偏移量可达10~6 ?/h;数字计算机技术的发展进一步推动了SINS的发展,短期中精度、低成本特征显著,呈现出取代平台式系统的趋势。在整个惯性技术发展过程中,大量的科研机构以及实验室作出了极大贡献。
2 惯性导航系统发展及设计的主要影响因素
2.1 成本性能及导航性能满足需求
惯性导航技术具有显著特征,最显著的特征和特性指标是导航性能以及成本价格。对惯性导航系统而言,价格成本不仅局限于系统本身的成本,还涉及惯性系统相关设备的维护保养成本等。导航性能的最主要指标是精确性,另外还包括惯性导航系统的易操作性以及连续完整性。因此,在惯性导航系统设计应用过程中,需要结合实际需求,明确系统导航性能需求,保证其性能优越性。同时还应该充分考虑惯性导航系统的成本和价格,使价格合理。
2.2 应用环境适应性
惯性导航系统在实际应用过程中会因为应用领域的不同而导致应用环境的巨大差异,在设计应用过程中必须充分考虑应用环境的实际情况,将应用环境和惯性导航系统设计相结合,包括系统可靠性、能耗性以及可用性等,保证设计的惯性导航系统在应用环境中适应性良好。
2.3 系统通用性
上文提出惯性导航系统环境适用性问题,主要是由于惯性导航系统应用领域广泛,因此,在惯性导航系统设计应用中,还必须要充分考虑其通用性问题,能够应用于不同领域和不同环境中。
3 惯性导航系统应用领域概述
惯性导航系统和传统导航系统相比,具有极强的抗干扰能力,以用户实际导航需求为基础进行设计与应用,目前在众多领域中开始引用发展这一技术。最开始惯性导航系统主要应用于军用领域,近年来,惯性导航技术开始进一步发展,应用领域进一步扩展。由原来的船舶、航空、飞行器、舰艇等领域扩展到星球探测、海洋勘探以及隧道、铁路和大地测量等领域,在儿童玩具、智能机器人等领域中也开始应用惯性导航技术。虽然不同领域中对惯性导航系统的具体应用存在差异,对设备性能需求也有所不同,但最终目的和方法具有一致性。就海洋和航天领域而言,对惯性导航系统应用精度要求较高,一般该系统连续工作时间较长;以空间站、卫星为代表的航天器对惯性导航系统寿命要求较高;军事领域、航空航天领域对惯性导航系统的可靠性和精度要求较高。
4 惯性导航系统发展趋势
4.1 总体发展趋势
(1)对导航精度要求较高的领域和场所,惯性导航系统具有不可替代的作用,对于无法接收全球导航卫星系统(Global Navigation Satellite System,GNSS)信号的场所,高可靠性惯性导航系统也具有很好的适用性。
(2)GNSS技术快速发展,代替了部分INS的应用领域。我国在关于GNSS的研究中,还不断引入新技术,提高该系统应用的可靠性与精度。
(3)要想实现系统功能,往往将INS系统和其他导航技术相结合,目前技术成熟的组合导航系统代表是GNSS/INS,自该系统被提出以来得到了广泛应用。
(4)在民用市场快速发展背景下,对惯性导航系统的需求进一步提高,成本低、一体化、小型化的组合导航设备成为惯性导航系统发展的重要趋势,惯性导航系统面对这一发展机遇,也面临极大挑战。
4.2 工艺和材料
在分析中提出惯性导航系统导航性能是重要因素,而导致性能指标差异的关键因素是工艺和材料。当前在惯性导航系统设计中引入自动化生产技术,采用批量处理技术发展该系统。另外,在惯性导航系统生产材料选择中,不局限于传统石英和硅片,应该结合光电材料发展建设新型高精度传感器。
4.3 生产成本
在惯性导航系统设计与应用中必须考虑成本因素,不仅要降低生产成本,包括传感器等组成设备的成本也要尽可能降低,还应尽可能选择质量好、精度高的元器件,以减少惯性导航系统的操作、维护、保养费用。
4.4 体积
惯性导航系统中的测量传感器向着重量轻、体积小的方向发展,未来一些惯性传感器甚至无法用肉眼识别,例如奈姆斯机电系统(Nano-Electromechanical System,NEMS)和光学NEMS等。
5 结语
在未来惯性导航系统的发展中,小体积、低成本、高性能是必然发展趋势。在系统发展的同时应不断提高传感器的精度和性能,尤其在新世纪,计算机技术和高科技的发展、普及使得惯性导航系统不断发展,能实现导航方式完全自主化的系统具有广泛的应用前景。
[参考文献]
[1]贾亮,陈海明.基于MEMS惯性传感器零速检测算法的研究[J].电脑与信息技术,2019(3):26-29.
[2]刘炳琪,魏诗卉,苏国华,等.中远程导弹惯性/星光组合导航关键技术及研究现状[J].系统工程理论与实践,2019(5):1351-1362.
[3]侯择尧,祁宇明,冯玉飞.基于双闭环控制的平衡车惯性导航算法分析[J].现代制造技术與装备,2019(5):11-13.
[4]陈宇磊,黄晓杰,吴磊,等.基于惯性导航系统的轨道不平顺方法[J].科学技术与工程,2019(13):249-253.
[5]王胜和.基于惯性导航的消防室内定位技术研究[J].西昌学院学报(自然科学版),2019(1):67-69,95.
