车辆跟驰系统的分析
2019-10-21 06:24李子龙
汽车世界·车辆工程技术(下) 2019年6期
李子龙
摘 要:车辆跟驰行为指的是车辆在行驶时无法超车,后车跟随着前车行驶的驾驶行为。智能车辆跟驰系统,作为智能车辆控制系统中的一個关键子系统,能够模拟人的驾驶行为使前后车之间保持安全距离,既不发生碰撞也不拉大距离,在现实应用中可以保障行车安全又合理地利用了道路资源,具有较高的研究价值和应用前景。为此,本文针对智能车辆跟驰系统展开研究,并在车辆运动控制系统基础上设计实现智能车辆跟驰行驶。本文从分析车辆跟驰系统结构入手,对车辆跟驰行为状态和车距检测方法对比与选择进行分析。
关键词:跟驰系统;跟驰行驶;超车
1 车辆跟驰系统方案设计
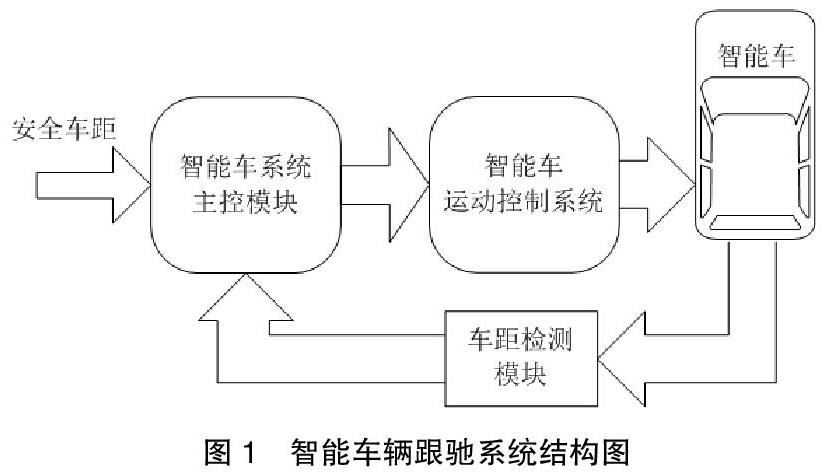
本文研究的是车辆在单一车道,且无法超车的情况下,能与前车保持安全距离并自动行驶的自动控制系统。该系统是以单片机为主控模块,以智能车辆运动控制系统为执行机构,以车距检测模块为反馈装置,实现车辆跟驰行驶。车辆跟驰系统结构图如图1所示。
在本文设计的智能车辆跟驰系统中,智能车运动控制系统作为跟驰系统的执行机构,用来控制车辆沿单一车道行驶,同时精确的控制车速的大小,实现车辆的跟驰行驶。
由于在设计车辆运动控制系统时已经在主控模块的硬件和软件上预留出丰富的资源供系统进行功能扩展。因此,智能车控制系统的主控模块与智能车运动控制系统主控模块相同,共同采用STC12LE5412AD单片机为主控芯片的控制电路板。
智能车辆跟驰系统的设计与实现的主要内容在于车距检测模块的研制以及跟驰算法的研究。
2 车辆跟驰行为状态分析
车辆的跟驰驾驶是当车辆在无法超车的条件下,后车跟随前车的行驶状态。在跟驰驾驶时,后车不考虑相邻车道的车辆信息,只考虑与前车的相互作用。此时,为了不发生碰撞,后车力求保持一定的安全距离。因此,后车只能根据前车的驾驶状态,采取相应的运行方案。在车流中,后车并不能对前车产生同样的影响。
真实车辆行驶实际上只受驾驶员本人驾驶行为的控制,在单一车道上,后车驾驶员在进行跟驰驾驶时,参考的依据仅仅来源于肉眼观察的本车与前车之间车距以及车距的变化量。后车驾驶员根据肉眼观察的情况依据个人主观的驾驶经验进行加速和减速的操作,达到实现跟驰行驶的目的。但是这些驾驶经验是日常积累的,无法用语言来表达,而传统的数学方法也没有办法来表示。这时,模糊推理理论成为可以帮助通过数学方法解决这个问题的一个途径。建立在模糊推理之上的跟驰系统算法,主要是通过推测司机将来的逻辑阶段,达到能模拟司机的驾驶行为,具有一定的科学性和现实意义,对于本文研究的智能车跟驰系统而言车车距检测模块相当于驾驶员的眼睛,检测电路输出的车距信息以及车距信息的微分量便是跟驰系统的两个输入量。
3 车距检测方法对比与选择
目前在移动机器人避障测距中应用较广的传感器有超声波传感器、激光传感器、光电式传感器等。
其中超声波传感器主要应用于低速、近距离的倒车系统,激光传感器主要是靠激光束照射在前车的反射镜后反射回来的激光束探测两车距离来避障。
障碍探测电路比较成熟的有汽车倒车测距电路、激光脉冲时差测距电路、激光相位测距电路、摄像头图像分析测距等。
汽车倒车测距电路使用的是超声波回波测距,发射超声波脉冲,根据接受回波的时间来测量车后障碍与探测器的距离,使用一发多收的方式探测较大范围,方向角约45-90度,有效距离约为0.7-5m。
激光脉冲时差测距电路,原理基本与汽车倒车测距电路相同,使用的是半导体激光发射器,采用望远镜光敏检测结构,测量距离大约在10km,误差大约10m,主要用于武器火控测距。
激光相位测距电路采用达到ns数量级的高速光电检测器、高速处理器,对发射光进行调制,然后根据反射光与发射光的相位干涉关系测量距离,可以达到100m的探测距离,误差也可以控制在mm数量级,主要用于精密野外测绘。
摄像头图像分析测距采用CCD面阵感光,通过驱动马达调整镜头焦距让待测目标成像清晰,根据焦距和像镜距离可以计算出物镜距离。主要用于数码相机自动调焦。
以上各种测距方式都是从各自实际应用场合出发,针对性强。对于本文所研究的小车避障系统而言,智能车车长为10cm,因此检测距离在0~10cm范围,而超声波测距不仅电路复杂且用通常的测量方法检测距离范围在20~300cm,在较近距离上有盲区。激光时差测距电路探测距离太远、误差大、笨重而显得不实际。激光相位测距电路精度高速度快,但是体积和功耗以及价格都不合适。摄像头图像分析测距则需要机械驱动,且需要配合高速计算芯片如DSP,在本系统中使用导致其检测速度必然缓慢,因此不适用于本文研制的智能车跟驰控制系统。
考虑到红外反射式光电传感器反应速度快,能实现非接触测量,而且精度高、分辨力高、可靠性好,加之半导体光敏器件具有体积小、重量轻、功耗低、便于集成,价格低廉等优点,所以本文认为使用红外反射式光电传感器来检测车距比较合理。
4 总结
车辆的跟驰系统是智能车辆控制系统的关键部分。本章针对智能车辆跟驰系统展开研究,分析车辆跟驰行为状态,再对车距检测方法进行对比。希望本文的研究能给车辆跟驰系统的后续研发提供一些帮助。
参考文献:
[1]杨龙海,张春,仇晓赟,李帅,王晖.车辆跟驰模型研究进展[J].交通运输工程学报,2019,19(05):125-138.
[2]谢辉.车路协同环境下的车辆跟驰行为研究[J].公路,2019,64(08):317-320.
[3]申勇,马天奕,李祥尘.考虑速度对反应强度影响的车辆跟驰模型[J].交通运输工程与信息学报,2019,17(02):153-159.