
汽车线控制动技术研究
2019-10-21 07:18张海山,伍星星,杨昭辉
汽车实用技术 2019年23期
张海山,伍星星,杨昭辉
摘 要:作为汽车制动系统的重要发展方向,分析线控制动技术类型及研究现状,阐述其功能特点和工作原理,并针对当前热门的I-EHB集成式线控制动技术进行详细了叙述。通过分析:相较于传统制动技术,I-EHB集成式线控制动技术在无人驾驶、再生制动方面具有明显优势,能更好地适应不同工况下的车辆,具有广泛的研究前景和应用前景。
关键词:线控制动;I-EHB;集成式;再生制动
中图分类号:U463.51 文献标识码:A 文章编号:1671-7988(2019)23-52-03
Research on brake by wire technology of vehicle
Zhang Haishan1, Wu Xingxing2, Yang Zhaohui3
(1.SAIC General Motors Wuling Automobile Co., Ltd,. Guangxi Liuzhou 545007; 2.School of Mechanical andTransportation Engineering, Guangxi University of Science and Technology, Guangxi Liuzhou 545006;.Lianchuang Automotive Electronics Co., Ltd., Shanghai 201806)
Abstract: As an important development direction of automobile braking system, the types and research status of brake by wire technology are analyzed, its functional characteristics and working principle are elaborated, and the currently popular integrated-brake by wire technology named I-EHB is described in detail.Compared with traditional brake technology, integrated-brake by wire technology named I-EHB have obvious advantages in automatic driving and regenerative braking by analyzing. It can better adapt to different working conditions of vehicles, and has a broad research prospects and application prospects.
Keywords: Brake by wire; I-EHB; Integrated; Regenerative braking
CLC NO.: U463.51 Document Code: A Article ID: 1671-7988(2019)23-52-03
前言
科技進步推动汽车技术飞速发展,汽车质量与性能大幅提高,我国汽车保有量也越来越大。车速的加快造成交通事故的增多,对人身安全造成了巨大的威胁。由此,汽车安全稳定高效制动正变得越来越重要。
汽车正向着智能化、电动化、网联化、轻量化方向发展,以纯电动汽车和无人驾驶为代表的车型成为当前汽车行业发展的主流。技术的升级提升了汽车性能,性能提升要求更安全稳定高效制动。但是传统制动技术体积大、响应慢,无法适应新型车辆的需求,不利于汽车轻量化[1]。线控制动技术不仅解决了传统制动带来的一系列问题,更为汽车制动的快速发展带来了新的契机与方向。
1 线控制动技术简介
1.1 线控制动技术种类
线控制动技术从航空技术领域引入,正被越来越多的供应商和主机厂所重视。线控制动取消了传统制动的真空单元,以电控模块来实现制动力,同时有着不小的体积优势。汽车线控制动系统目前主要分为电子液压制动(EHB)和电子机械制动(EMB)两种[2]。
EMB系统采用电子控制,通过伺服电机直接作用于轮缸产生制动力。由于取消了主缸、液压管路等复杂的零部件结构,制动更迅速,制动力的传递效率得到提升[3]。
EHB是将传统液压制动技术的动力源替换为电子控制系统,他取消了传统制动系统中的真空供给部件和真空助力部件,用电子系统来提供动力源[4-5],同时保留了成熟的液压部分,可以在电子助力失效时提供备用制动,确保车辆安全。传统车用12V电源即可驱动EHB系统,无需设计新的供能系统[3,6]。
1.2 线控制动技术发展现状
自20世纪末开始,世界各主要制造商都对线控技术展开研究并取得了一定的阶段性成果。进入21世纪后,线控制动的发展更加迅速,有些已经装备在量产车上。如大陆公司(Continental)的电子液压制动系统MKC1,已小批量应用在量产车上[7];博世公司成功开发出iBooster系统,并集成多种主动安全配置,提升车辆安全性[1,8]。而在国内,以清华大学、吉林大学为首的高校大多数仅仅是对线控制动理论及控制方法的提出,实车试验及系统可靠性研究方面还较少[9]。其中吉林大学提出一种电子机械制动,利用电机和减速机构方案制动[10]。清华大学的王治中等提出了一种分布式电液复合制动系统,同济大学的熊璐等人提出了双动力源电液制动系统等,但目前均未实现量产[11]。
2汽车线控制动工作原理
2.1 EMB系统
EMB系统完全不同于传统的真空助力液压制动系统,EMB作为纯机械系统,使用控制模块和伺服电机进行制动。EMB系统主要由踏板模块、控制模块、驱动执行模块等组成,系统有4套独立的制动系统,分别位于四个轮毂的轮缸处,并且配有独立的控制器,以便实现四轮制动力的独立调节。
EMB系统的主控制器通过接收踏板位移传感器的位移信号,以及整车其他ECU发出的车速信号、方向盘转角信号等相关信号,分析后控制四个独立的控制器向对应的电机发出制动信号,电机通过减速机构将电机扭矩转化为所需的制动力,进行制动。车辆转向时,每个车轮制动系统分配的制动力不一样,从而达到平稳转向的目的。EMB系统由于没有了液压制动管路的存在,避免的制动液泄露的风险,有利于环保。同时由于是独立的制动系统,布局上更加灵活 [12]。但是由于制动电机的增多以及功率的加大,12V电源无法满足制动需求,42V电源成为限制EMB发展的重要因素。同时由于没有备用的制动系统,安全性还有待提升[13]。
2.2 EHB系统
EHB系统不同于EMB系统,只用了一个伺服电机和一套控制器为系统提供动力,取消了部分传动制动部件,但保留了成熟的液压部分。EHB系统目前主要有两种:一种由液压泵和高压蓄能器提供动力源(P-EHB);另一种由电机和减速机构为动力源(I-EHB),同时集成电控模块。P-EHB系统获取制动信号后,向电动液压泵发出相应的电信号,将足够的制动液泵入高压蓄能器,利用高速开关阀实现车辆的制动。
I-EHB系统主缸液压力由电机通过减速机构提供,电机接收来自控制器的制动信号,经过减速机构直接推动主缸活塞对制动主缸进行建压。相较于P-EHB,I-EHB结构更加紧凑、响应快速,更易于集成诸如EPB、ESP等多种主动安全功能[14-15],解耦单元使得整套系统灵活制定制动方案,不仅节约了成本,更可缩短车辆的开发周期。
3 I-EHB系统关键技术
I-EHB系统是一种集成式电子液压制动系统,不同于P-EHB系统的动力源,而是以电机+减速机构来代替,内部集成电控模块,整个系统结构更加紧凑。图1为Bosch公司的iBooster系统。
图1 Bosch公司iBooster系统
3.1 I-EHB系統主要组成结构
3.1.1 意图获取模块
意图获取模块主要有制动踏板、踏板位移传感器、踏板感觉模拟器等,制动踏板经过踏板位移传感器将驾驶员所踩的制动踏板位移信号发送给I-EHB的ECU。踏板感觉模拟器用来模拟真实状态的脚感与路感。踏板和主缸之间完全解耦,脚感较轻,更便于能量回收。
3.1.2 分析控制模块
分析控制模块是整个线控制动的核心,主要为I-EHB的ECU。ECU通过踏板获取驾驶员的制动意图后,根据相应的算法计算出最佳制动力,控制制动系统的执行。ECU由嵌入式芯片、信号采集及处理电路、通讯电路、电机驱动电路、冗余电路及I/O口等组成。
3.1.3 液压执行模块
分析控制模块为线控制动的执行部分,包括伺服电机、减速机构、制动主缸等。伺服电机作为驱动电机,与减速机构连接,可直接使用传统车载12V电源,减速机构可增强整个系统的扭矩,获得更大制动力。伺服电机接收来自ECU的制动信号,通过减速机构推动制动主缸建压。
3.2 I-EHB系统工作过程
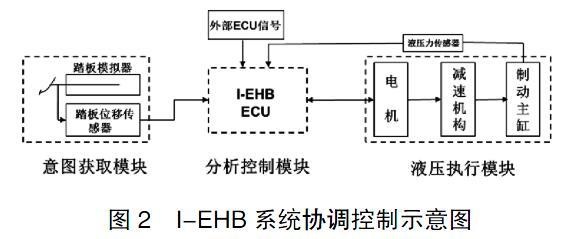
I-EHB系统通过意图获取模块、分析控制模块、液压执行模块等几个模块协调完成整个制动过程,I-EHB系统协调控制示意图如图2所示。
图2 I-EHB系统协调控制示意图
在车辆正常工况下,I-EHB的ECU接收踏板位移传感器从踏板采集的制动力位移信号,以及其他外部ECU发出的方向盘转角、轮速、横摆角速度等信号,来获取驾驶员的驾驶意图,利用算法计算得出车轮所需的最佳制动力。在制动踏板与主缸完全解耦条件下,踏板感觉模拟器可以根据驾驶员的制动动作输出线性的脚感同时反馈车辆制动状态。制动力转化为电信号输出给伺服电机,电机和减速机构连接,通过减速机构将电信号大小转变为齿条行程大小,推动制动主缸活塞,最终完成建压。制动主缸液压力信号将实时反馈给I-EHB的ECU,用于精确控制主缸压力以及对制动主缸保压。
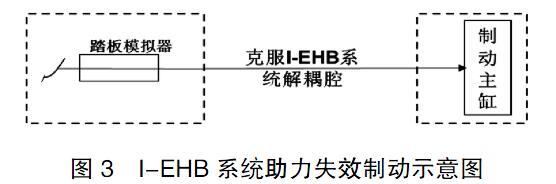
当车辆处于紧急状态下需要急停或者制动系统电子助力失效时,如图3所示,I-EHB提供备用机械制动系统。驾驶员快速紧急制动,迅速克服系统内部的解耦腔,此时制动踏板推杆将直接作用于制动主缸,主缸液压力大小直接由制动踏板提供,一定程度上保证紧急情况下的制动安全。
图3 I-EHB系统助力失效制动示意图
3.3 I-EHB系统控制方法
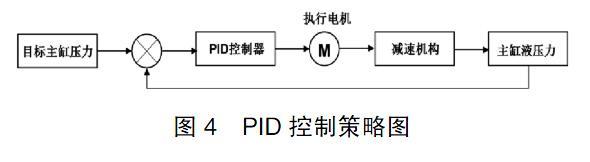
在传统制动系统中,主缸液压力完全来自制动踏板推进的深度,因此,制动时无法精确控制主缸液压力。对于驾驶新手来说,驾驶经验不足不仅影响车辆制动感觉,更影响车辆在紧急状况下整车制动的安全性。I-EHB系统由于采用了电控单元,同时制动踏板与主缸活塞之间完全解耦,使得主缸液压力控制更加迅速与精确。对于I-EHB系统主缸液压力的控制,实际上就是对伺服电机的控制,利用ECU根据相应的控制算法计算驾驶员需要的最佳制动力,将最佳制动力转化为电机的电流信号或者命令力矩,从而完成主缸的建压。
图4 PID控制策略图
如图4所示,对以电动机+减速机构为动力源的I-EHB系统的控制算法,大多以闭环反馈控制为主。在闭环控制中,比例积分微分控制(PID控制)是一种最常用的控制方法,同时可通过参数整定变化多种控制结构,获得不同的控制效果。运用在I-EHB系统中的主要控制思路是通过液压力传感器将主缸液压力实时反馈给ECU,将ECU计算出的期望主缸液压力和输出的实际主缸液压力进行对比,然后将二者之间的偏差值利用ECU中设好的PID算法对其整定,输出一个最合适的量给电机,对主缸液压力进行补偿。
4 结论
随着线控制动的不断发展与技术完善,已逐渐成为汽车新技术发展的主流。相较于传统制动方式,线控制动技术有着不可替代的优势,大大提高了车辆的安全性和舒适性。I-EHB系统作为新型电子液压制动系统,对其进行研究不仅能进一步提高汽车的制动性能,还有利于无人驾驶汽车智能化程度的发展,为更多的车辆电控系统的理论研究与应用奠定了宝贵的基础。
参考文献
[1] 赵海涛.汽车电子液压制动系统跟随特性的实验研究.吉林:吉林大学,2011.
[2] 汪洋.汽车EHB液压系统动态特性仿真与试验研究[D]南京:南京航空航天大学,2010.
[3] 余卓平,韩伟,徐松云等.电子液压制动系统液压力控制发展现状综述[J].机械工程学报,2017,53(14):1-15.
[4] 李冰林,王刚刚,万茂松.汽车EHB系统动态特性的仿真分析[J].现在制造工程,2016,(04):74-79.
[5] 李静,杨雄,苗卉等.基于台架试验的电控液压制动系统动态特性[J].吉林大学学报(工學版),2016,46(01):15-20.
[6] 金智林,段博文,王睿等.基于AMESim的电控液压制动系统动态性能分析[J].重庆理工大学学报(自然科学),2014,28(03):1-5.
[7] FEIGEL HOR.Integrated brake system withoutcompromises in func -tionality[J]. ATZ Worldwide,2012.114(7-8):46-50.
[8] 张鸿生.汽车电控液压制动系统性能分析与控制[D].南京航空航天大学,2013.
[9] 孙禄.某轿车线控制动响应特性分析与硬件在环试验研究[D].吉林大学,2018.
[10] 晁鹏翔,申伶,陶凡等.电控机械制动系统研究[J].汽车实用技术,2018(20):138-140.
[11] 广学令.电子液压制动系统评价体系研究[D].上海:同济大学, 2016.
[12] 林逸,沈沉,王军等.汽车线控制动技术及发展[J].汽车技术,2005 (12):1-4.
[13] 杨万庆.电子液压制动系统EHB综述[J].城市车辆,2007(6):43-45.
[14] 汪洋,翁建生.车辆电控机械制动系统的研究现状和发展趋势[J].商用汽车,2005(11):102-104.
[15] KIN K,KIRYU H.Enhanced vehicle stability and steerability with VSA[C]// International Symposium onAdvanced Vehicle Control, AVEC2002.
