
基于凸轮机械手的自动网球拾取机器人设计
2019-10-11 12:07郭天宇艾文浩孙长富孙建荣王桂超
无线互联科技 2019年12期
郭天宇 艾文浩 孙长富 孙建荣 王桂超
摘 要:文章对基于凸轮机械手的自动网球拾取机器人设计进行了全面的说明,该系统以凸轮的推程和回程两个工作行程为基础实现机械手的抓取和释放,全面阐述了凸轮及机械手连杆的参数选择和计算。利用视觉识别系统对网球进行识别与定位,控制机械手对网球进行抓取,并通过巡回式的运动轨迹实现对整个球场的清理,是一种可实现的网球拾取机器人方案。
关键词:网球拾取机器人;凸轮机构;连杆机械手;视觉识别
网球运动竞技性较强,运动过程中需要大量的跑动,体力消耗巨大,因而在运动时,人们会选择多带几个网球以减少捡球的麻烦,就会带来网球散落在球场各处的问题,产生安全隐患。同时,对于球场经营者来说,如果雇佣专门捡球的球童,一方面,会加大对球场维护的投入成本,另一方面,球童素质水平参差不齐,多为临时的流动人员,对网球爱好者的人身财产安全来说,存在一定隐患,因而设计一种自动捡球的机器人有极大的必要性。
1 系统总体设计
本文介绍的基于凸轮机械手的网球机器人主要实现3个功能:(1)对网球的识别定位。(2)运动路线的规划。(3)对网球的抓取及收集。机器人的主体(见图1)搭建基于一个全方位移动平台,视觉识别模块位于平台前端,用于对网球的识别定位,网球信号确认后,系统控制机械手进行抓取动作,抓取确认成功后,气缸顶起同时机械手松开,网球斜抛入框[1]。
2 视觉识别定位系统设计
2.1 图像采集处理模块
智能网球拾取机器人的图像实时采集由安装在机器人前端的互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)摄像机完成,因彩色图像能够反映更多的空间信息,本系统采用的图像识别分析模型为色调—饱和度—亮度(Hue-Saturation-Intensity,HSI)颜色空间模型,但由于COMS摄像机采集的图像是RGB格式,所以需要把RGB模型转换为HSI颜色模型,然后再进行相关的图像处理,缩短其响应时间,更有利于对机器人的实时控制[2]。两者转换公式如下:
色调:
其中,
饱和度:
亮度:
网球的识别主要通过色域识别法进行,视觉传感器摄取图像进行像素分块、数位化等预处理,后将预处理的图像传回软件进行阈值划分,划分出阈值范围相同的像素色块作为连通色域。由于网球颜色的亮度较高,能与低亮度的网球场及周围杂物进行有效区分,因而可识别判断是否为网球,同时,回传数据给处理器,由处理器确定路线进行下一步行动。
2.2 路径选择模块
当视野里有多个网球时,机器人采取的策略为行程最短,即最短距离原则,假想场景:当机器人识别到有3个网球在视野中,分别为网球Ⅰ,网球Ⅱ,网球Ⅲ。通过测距比较得出与网球Ⅰ距离最短,则机器人向网球Ⅰ运动并实行捡球动作,需注意的是此过程中,目标将锁定网球Ⅰ,直至将网球Ⅰ拾取完成。到达网球Ⅰ位置后再对视野内目标网球再次进行比较判别,假若网球Ⅱ与网球Ⅲ仍同时在视野中且无其他目标物出现,则比较距离驱使机器人驶向更近的网球Ⅱ,以此类推[3]。
2.3 机器人定位模块
本机器人采取巡回扫场的运动轨迹,定位模块主要定位机器人与网球之间的相对位置。由视觉识别模块获得色域信息,通过软件计算色域面积,比对设定的面积数据要求,确定相对位置,再配合红外测距,在小车与网球相距17.3 cm时,停止运动并进行抓取,相对位置允许存在6%~10%的误差。
3 凸轮机械手设计
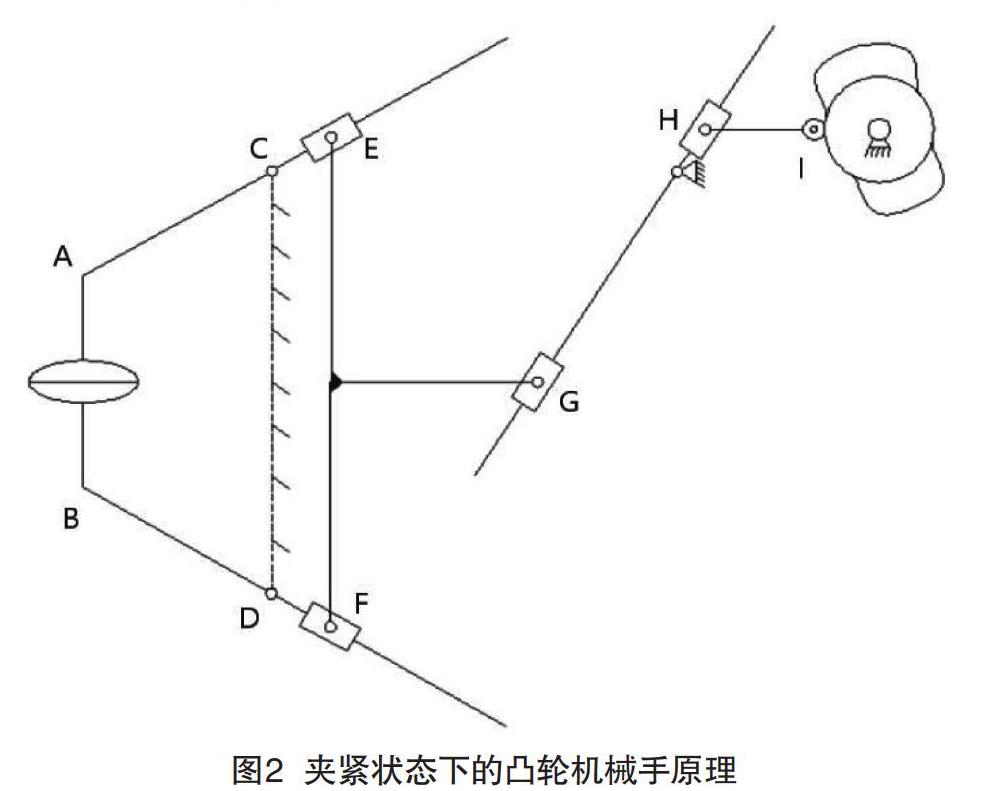
凸轮机械手主体为平面连杆机构,其中,C,D为铰接机架固定在顶起底板上,杆CE和杆BF可分别绕C,D在平面内自由旋转。T型滑杆EFG左右移动实现机械手的张开和夹紧。杆GH为杠杆放大机构,用于将凸轮行程进行放大,以缩小凸轮大小,节省机器人小车的空间,放大比例为1∶5。夹紧状态下的凸轮机械手原理如图2所示。
查阅相关资料可知,一般网球直径分布区间为6.541~6.858 cm,重量分布区间为56.7~58.5 g,按照误差正态分布,在设计时选用直径6.7 cm,重量57 g作为设计的标准尺寸。
为了确保抓取的成功率和可靠性,与网球接触的弧形抓手设计为弦长为80 mm,弦高为20 mm的圆弧,可以将网球完全包裹。
为了保证网球的顺利收集,需要对网球抛投的初速度及夹紧力进行计算[4]。
3.1 网球斜抛初速度
网球起抛点到网球框两个极限位置的水平距离x=690~990 mm,垂直距离h=640 mm。重力加速度为9.8 m/s2。由于机器人工作范围靠近地面,抛投速度较低且网球形状均匀,可忽略空气阻力对网球飞行过程的影响。
列方式组:
求解得:
v=1.88~2.42 m/s
3.2 网球的夹紧力
网球由确认夹紧到抛出所需的时间为1 s,且网球是沿半径为900 mm的1/8圆弧的路径做加速运动。可得网球运动的加速度为:
加速度的范围为3.618~4.176 m/s2。
网球获得加速度所需的力由两边抓手对网球的摩擦力提供,已知网球的设计质量为57 g,可根据:
求得摩擦力大小为0.206~0.238 N。
在网球与抓手的接触面处,为了保证夹取的可靠性,在抓手内表面覆盖有一层带有突起颗粒的橡胶层,查相关材料的参数可知,摩擦系数μ=0.54。因而,夹紧力大小为0.191~0.220 N。
抓取手部分采用伸缩手的设计,伸缩杆与大筒之间采用弹簧连接,在没有夹球的情况下,抓手在夹紧状态时,两抓手恰好完全貼合。因而,在有球的情况下,网球所需的夹紧力全由弹簧的弹力提供。故而有弹簧的劲度系数:
弹簧的劲度系数取值范围为:14.15~17.63 N/m。
又有标准弹簧的弹性系数的计算公式:
G = 剪切弹性模量(MPa)(钢丝:80 000)。
d = 线径(mm)。
n = 有效圈数。
D = 中心直径(mm)。
k = 弹簧劲度系数(N/mm)。
其中,线径为1 mm,中心直径为10 mm,有效圈数为20圈,可得理论劲度系数为0.5 N/mm,符合网球抓取的劲度系数要求。
3.3 机械手连杆
弧形手的张开和夹紧由T型推杆EFG控制,C,D分别为机架,位置相对连杆固定,推杆EFG与长连杆ACE通过移动副连接,凸轮带动推杆左右移动,使得CE段和DF段的大小不断变化,引起AC与CE,BD与DF之间的比例的变化,由于CD段和EF段的距离为定值,因而连杆段比例变化使得AB之间的距离随之变化,从而实现了弧形手的夹紧和张开[5]。
在考虑了整体结构的稳定性、网球抓取的稳定性以及连杆强度等必要因素后,对机械手连杆的相关参数作了以下的设计。
弧形手(包括伸缩部分)长度为100 mm。
长连杆ACE长度为650 mm。
T型推杆EF段长为450 mm,水平段长为200 mm。
放大杠杆GH长为360 mm。
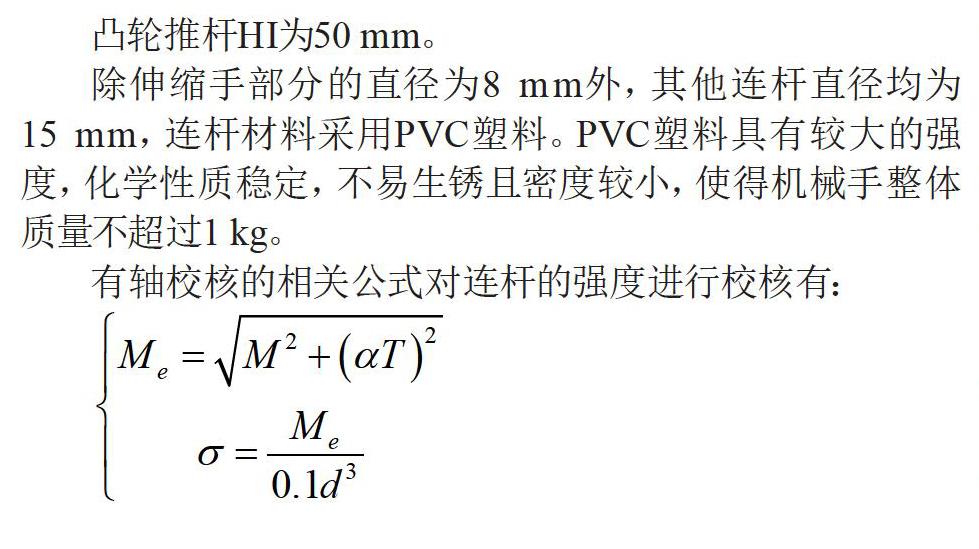
凸轮推杆HI为50 mm。
除伸缩手部分的直径为8 mm外,其他连杆直径均为15 mm,连杆材料采用PVC塑料。PVC塑料具有較大的强度,化学性质稳定,不易生锈且密度较小,使得机械手整体质量不超过1 kg。
有轴校核的相关公式对连杆的强度进行校核有:
查相关数据得PVC塑料的拉伸强度为50~80 MPa。经计算校验,设计的轴径完全符合要求的强度,故而设计尺寸可行。
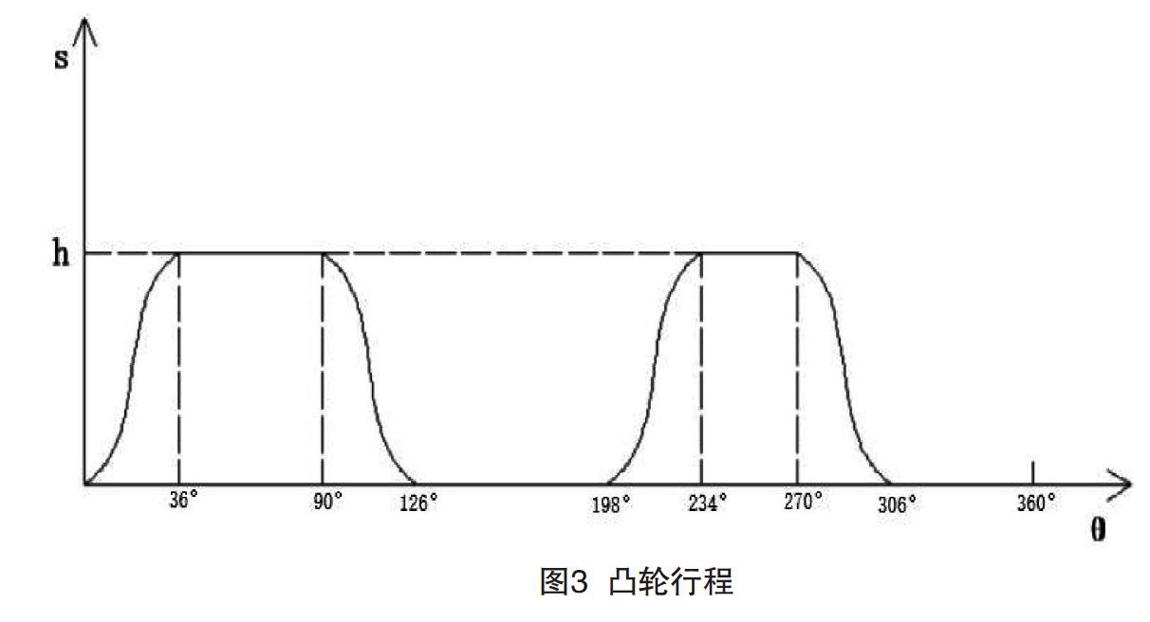
3.4 凸轮的设计
凸轮是机械手控制的核心构件,凸轮设计的精度将直接影响机械手抓取以及后续抛投动作的进行。考虑到凸轮运动的平稳性以及避免刚性冲击,凸轮的推程和回程的行程变化(见图3)为匀变速,即先匀加速后匀减速,凸轮旋转一圈所需时间为5 s。
由凸轮的行程可以得出凸轮运动的4个阶段之间的关系,同时,拟定几个凸轮基圆半径,分别为30 mm,40 mm和50 mm,在综合考虑凸轮失真及运动稳定性的情况下,确定50 mm作为凸轮基圆半径最为合适。
为了尽量避免长时间使用下,凸轮磨损导致凸轮从动件运动失真,延长使用寿命,凸轮从动件采用滚子,可有效降低凸轮磨损。同时,由于凸轮机械手是水平放置,为了保证滚子与凸轮的贴合,滚子上端添加一个压紧弹簧,使凸轮与滚子保持贴合。
4 运动电机及气缸的选择
本文运动电机选用微型带蜗轮蜗杆型减速直流马达,微型带蜗轮蜗杆型减速直流马达可以改变马达的接线正负以改变马达的旋转方向。同时,蜗轮蜗杆减速电机具有自锁性,即在马达没有电的情况下,输出轴是无法转动的,这可以提高机器人位置控制的精度。
本文气缸采用通用的SE标准气缸,内径32 mm,额定压力为1.5 MPa,工作行程为100 mm。
5 结语
为了解决网球运动过程中网球拾取的问题,本文设计了一个网球机器人的设计方案。适用于室内外标准的网球场地。
基于凸轮机械手的网球拾取机器人的主要特点为:以COMS摄像机为视觉传感器,基于色域识别的视觉识别模块;以凸轮和连杆机构为主体的抓取机械手设计;抛投式网球收集。
本文提出的网球机器人设计,机械结构简单,可靠性较高,是一种操作性较高的网球机器人设计。该机器人的设计使用可有效提高网球爱好者的训练效率,节省时间和人力,同时,对球场可实现智能无人化管理,给予网球爱好者足够的私人练球空间,具有良好的市场发展前景。
[参考文献]
[1]王凯,李小坚.基于全景视觉的网球识别系统设计[J].工业控制计算机,2017(9):22-23.
[2]隋裕召,杨小军,应振根,等.基于视觉识别的智能网球拾取机器人的设计[J].科技创新导报,2017(23):16-17.
[3]林广茂,王天雷,招展鹏,等.基于视觉识别的全自动网球拾取机器人设计J].机电工程技术,2017(3):55-56.
[4]马履中,谢俊,尹小琴.机械原理与设计(上册)[M].北京:机械工业出版社,2009.
[5]马履中,谢俊,尹小琴.机械原理与设计(下册)[M].北京:机械工业出版社,2009.
Design of automatic tennis pickup robot based on cam manipulator
Guo Tianyu1, Ai Wenhao1, Sun Changfu1, Sun Jianrong1, Wang Guichao2
(1.School of Mechanical Engineering, Jiangsu University, Zhenjiang 212013, China;
2.Nanyang Institute of Advanced Technology, Nanyang 473000, China)
Abstract:The design of automatic tennis pickup robot based on cam manipulator is explained in this paper. The system realizes the grasping and release of manipulator with two working stroke of cam push and return, and expounds the parameter selection and calculation of cam and manipulator connecting rod in an all-round way. The visual recognition system is used to identify and locate the tennis ball, to control the manipulator to grasp the tennis ball, and to clean up the whole stadium through the patrol movement track. it is a kind of tennis picking robot scheme that can be realized.
Key words:tennis pickup robot; cam mechanism; connecting rod manipulator; visual recognition
