六自由度直升机运动模拟器结构参数优化方法研究
2019-10-11 07:29朱城辉
中国设备工程 2019年18期
朱城辉
(中国直升机设计研究所,天津 300308)
六自由度并联运动模拟器具有承载能力大、系统动态响应快、刚度高和无累计误差等特点,能够动态模拟飞机、舰船和车载设备等的性能,广泛应用于飞行员、船员等的飞行模拟训练和舰船航行模拟训练。六自由度运动模拟器结构参数设计是否合理关系到模拟器各项功能能否实现和控制的难易程度,比如,影响到六条支链的速度、受力和伸缩行程等,进而对选用液压缸、变量泵和位移传感器等产生重要影响,而液压缸、变量泵和位移传感器在六自由度运动平台的成本中占有重要位置。因此,本文研究运动模拟器的结构参数动力学优化设计,为后续机构详细设计提供指导,使其设计和制造成本最低。
1 机构结构参数简介和优化流程
六自由度运动模拟器的机构示意图和虎克铰在平台的铰接位置如图1 所示。
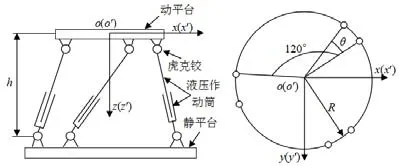
图1 六自由度运动模拟器机构示意图
本文以运动模拟器液压作动筒在给定工况下平均受载最小为优化目标,实现机构动力学结构参数优化,结构参数优化流程如图2 所示。
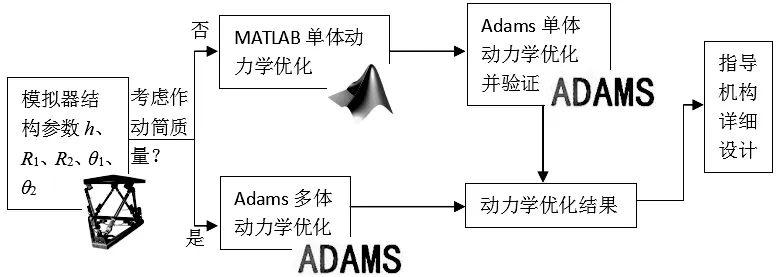
图2 结构参数优化流程
2 六自由度运动模拟器动力学分析
动力学分析是六自由度运动模拟器控制器设计和动态仿真的基础,其中,逆动力学分析对于运动模拟器研究最具实际意义,本文通过采用牛顿-欧拉法进行六自由度运动模拟器的单体动力学分析。
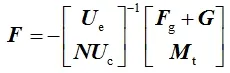
根据牛顿欧拉法,液压作动筒驱动力的显示表达为:
3 六自由度运动模拟器单体动力学分析实例
3.1 六自由度运动模拟器工况要求
为优化六自由度运动模拟器的结构参数,设定模拟器的运动工况如表1 所示。
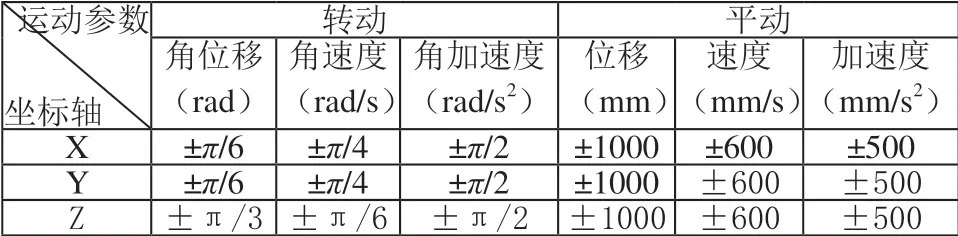
表1 模拟器单自由度运动最大参数
3.2 基于MATLAB 的动力学分析与计算
根据工况要求,在仿真实例中给定动平台的平动运动规律为

给定动平台的转动运动规律为

采用MATLAB 对结构参数进行优化,优化结果如表2 所示。

表2 运动模拟器结构参数MATLAB 优化结果
3.3 基于Adams 的动力学分析与计算
采用Adams 建立六自由度运动模拟器的参数化模型,如图3 所示,优化结果如表3 所示。

表3 运动模拟器结构参数Adams 优化结果

图3 六自由度运动模拟器参数化模型
4 Adams 多体动力学优化分析
为得到更精确的结构参数和和机构动力学性能,计及液压作动筒的质量,采用Adams 进行六自由度运动模拟器多体动力学参数优化,优化结果如表4 所示。

表4 运动模拟器结构参数Adams 优化结果
在实际工程中,为了简化计算过程,可以对运动模拟器进行单体动力学分析,近似优化结构参数。
5 结语
本文采用了两种方法对六自由度模拟器结构参数进行了动力学优化,得出了以下结论。
(1)采用牛顿-欧拉法建立六自由度运动平台的单体动力学模型,并采用MATLAB 进行了模拟器结构参数优化,然后进行了Adams单体动力学优化分析,通过比较两者的优化结果,验证了动力学模型的有效性和优化结果的工程适用性。
(2)采用Adams 进行了六自由度运动模拟器结构参数的多体动力学优化分析,通过比较单体和多体动力学优化结果,在液压作动筒和动平台质量相差很大的情况下,可以不计液压作动筒的质量,将单体动力学优化结果提高一定幅值应用于工程实际。
(3)优化结果能指导机构尺寸详细设计,合理选用液压缸、变量泵和位移传感器等,使系统设计和制造成本最低。
猜你喜欢
储能科学与技术(2022年2期)2022-02-19
小哥白尼(趣味科学)(2021年6期)2021-11-02
科学技术创新(2021年11期)2021-05-25
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
矿产勘查(2020年3期)2020-12-19
弹箭与制导学报(2020年4期)2020-09-17
航空发动机(2018年6期)2018-03-23
三联生活周刊(2017年48期)2017-11-25
科技视界(2017年16期)2017-11-11