高速转向架小幅蛇行运动状态下过道岔研究
2019-09-25 10:00:04
计算机测量与控制 2019年9期
(西南交通大学 机械工程学院,成都 610031)
0 引言
由于机车轮对具有一定锥度,即使车辆沿平直的轨道运行,只要有一个初始激励,轮对就会绕着轨道中心线一边横移一边摇头耦合向前运动,即蛇行运动。轮对的蛇行运动会引起转向架和车体在横向平面内的振动,称一次蛇行运动和二次蛇行运动[1]。蛇行运动的最大特点就是它的振动频率随着车辆运行速度的增大而增大,而车辆系统的自振频率只和自身结构有关,在列车运行速度超过临界速度时,蛇行运动频有可能会和车辆系统的某个固有频率接近,从而产生共振,导致蛇行运动振幅不断扩大,丧失了稳定性,即发生了蛇行失稳[2]。蛇行运动是限制高速列车不断提速的一个主要因素,轻则影响乘客的乘坐舒适性,重则破坏轨道线路,甚至导致列车脱轨。
迄今为止对于小幅蛇行运动(据文献[3],小幅蛇行即轮对发生小位移摄动时,转向架构架的横向加速度峰值小于8~10 m/s2)这一问题国内外并没有太多的研究,Souza A等[4]在研究货车转向架的蛇行运动时就曾多次提到当列车速度达到临界速度时,开始发生蛇行运动,但振幅很小并且此时轮缘与钢轨并不接触处于小幅蛇行状态。但随着速度增加,振幅随之增加,而当速度达到某一数值时,轮缘与钢轨开始发生触碰由小幅蛇行演变到了蛇行失稳状态。True H[5-6]在对复杂转向架动力学行为进行精确研究时从完成的分岔图中发现了一种新的分岔,在此分岔特性下转向架有一个稳定的周期振荡(极限环)此时的蛇行振幅很小并没有到大安全极限。Polach O[7]指出轮轨匹配的非线性特征决定了轮对极限环的稳定形态:亚临界分岔或超临界分岔;并在研究轮轨匹配的非线性特性时提出了车辆系统的Hopf分岔,认为这种未超过安全指标的小幅蛇行发生在超临界Hopf分岔下超过临界速度时。朴明伟等[8]表明当在超临界分岔下转向架小幅值蛇行。由于抗蛇行减振器具有的高频卸荷机制,并不会一直保持小幅状态可能会使拖车转向架动态行为达到或超过安全限制。蔡里军[9]通过理论推导和分析海量实测信号,认为当列车的横向加速度信号峰值未连续6次达到8~10 m/s2,但信号存在着严重不稳定现象或者连续多次超过2 m/s2时,在列车实际运行时也可认为是蛇行失稳,峰值在2~8 m/s2为小幅失稳状态。而对于道岔区间的研究国内已经做得比较成熟了。
以上文献中小幅蛇行运动均出现在列车速度达到或超过临界速度时,作者在研究列车实测信号时发现,在临界速度以下时,列车在较高的速度下易发生小幅蛇行失稳现象,并随着时间增加小幅蛇行可能会演变成标准的蛇行失稳。我国现有的铁道客车行车安全监测标准[10]并不能对小幅蛇行运动做出监测,所以我们一般研究道岔区间车辆稳定性时认为进道岔之前车辆处于平稳状态并未出现失稳(实际工况中列车在进道岔之前是有可能处于小幅失稳状态的)。基于以上分析,本文建立了高速转向架横向运动模型与道岔不平顺模型来计算分析机车车辆系统在小幅蛇行失稳状态下直向通过道岔。
1 高速转向架运动模型
1.1 建模方法
蛇行运动稳定性是车辆系统动力学的一个重要分支,而车辆系统动力学又是多体系统动力学的一个部分,因此动力学系统建模方法大多数适合机车车辆系统,其中包括有牛顿-欧拉方程、D’Alembert原理、Lagrange方程和多刚体动力学法等。本文根据模型的复杂程度和求解难度,选取了牛顿-欧拉法[11]。
牛顿-欧拉法主要建模过程是:根据研究目的,对真实的动力学系统结构进行简化,提取出主要的联接元件和刚体,其中刚体是用来描述系统的惯性特性,而联接元件是描述各个刚体之间相互作用的刚度、阻尼特性的。然后根据牛顿第二运动定律得到系统的3个位移方程,其次根据欧拉方程得到系统的3个转动方程,其一般形式:
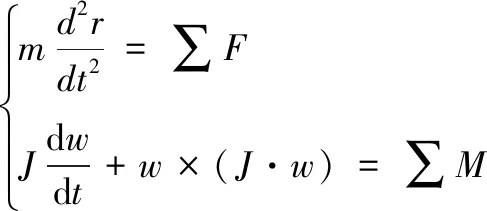
(1)
分别写出每个刚体的位移和转动微分方程以及约束方程,就可以得出该系统由约束方程和运动、转动方程所组成的微分代数方程组。
1.2 转向架横向运动模型
对于不同的研究目的,需要建立符合研究条件的车辆系统动力学模型。在车辆系统中每一个刚体在轨道坐标系的3个方向上均可以移动和转动,因此每一个刚体有6个自由度(横移、伸缩、浮沉、摇头、点头、侧滚)。自由度越多,模型越准确,但是全面考虑自由度,会增加所建的模型的复杂度,也会增大求解难度。所以针对研究目的,考虑所需的自由度即可,本文针对所研究的小幅蛇行运动,建立了转向架横向运动模型,模型中只需考虑与横向运动有关的自由度即横移和摇头自由度。转向架横向运动模型自由度更少,分析和求解更为简单,同时转向架模型中加入了一、二系悬挂力的作用,相比于整车动力学模型更为简单,同时也能达到其研究目的。
本节建立的转向架横向运动模型包括了一个构架、两个轮对以及一二系悬挂系统,其结构如图1所示,并对该模型做出了如下基本假设[12-13]:
1)视车体与转向架为相互独立的两个刚体,因此车体的滚摆及摇头振动对转向架产生影响不考虑。对于车体可只考虑质量以及荷载;
2)构架和轮对视为刚体,一二系悬挂考虑其非线性;
3)转向架横向与垂向运动是弱耦合的,以便更清晰的考察蛇行运动;
4)轮对在垂向上始终与钢轨保持接触,轮对具有轮缘;
5)忽略轮对的自旋效应,将轮轨接触关系视为轮对横移量的函数;
因此,该模型共有6个自由度,分别是1,2位轮对的横移、摇头,构架的横移和摇头,图2给出了转向架横向运动计算简图。
根据图2以及1.1节的牛顿-欧拉法可以导出转向架系统各刚体的振动运动微分方程如图1~2所示。
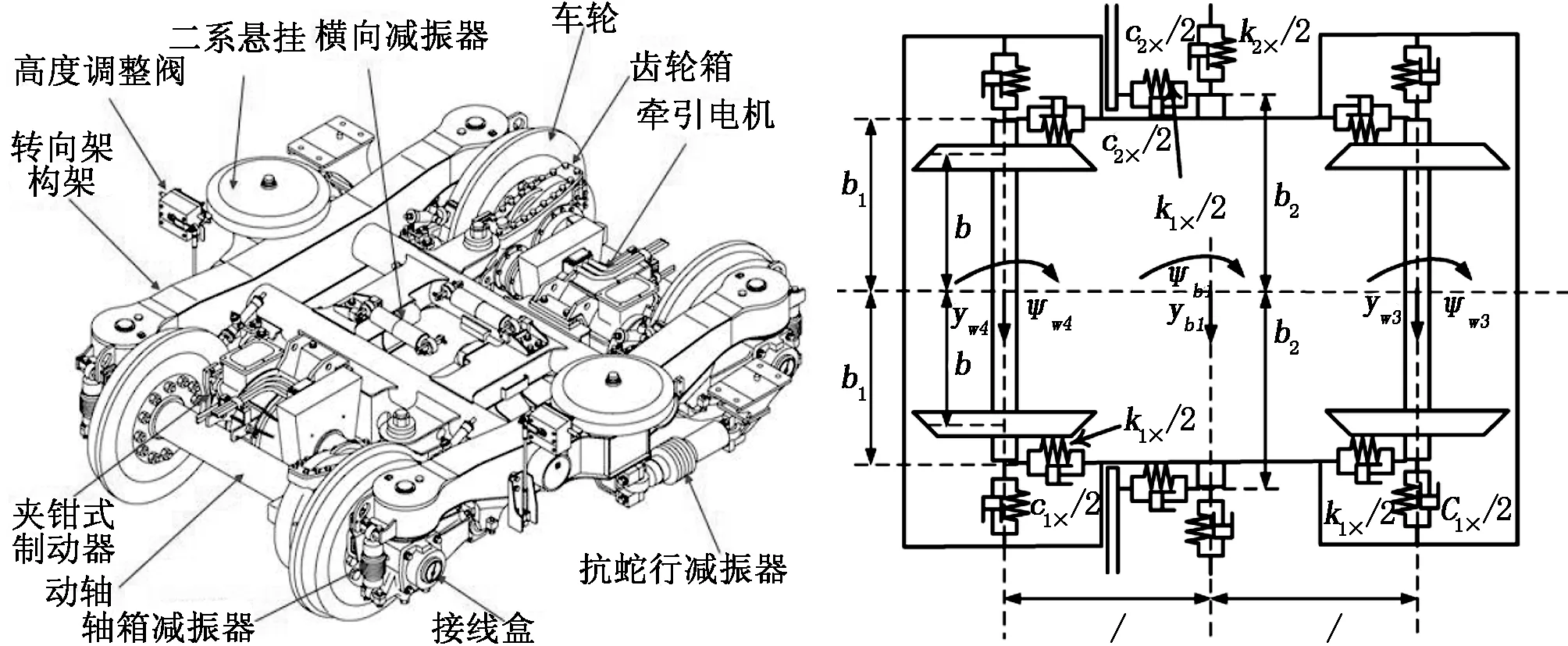
图1 转向架结构图 图2 转向架横向运动计算模型
1、2位轮对横移运动方程:
(2)
(3)
1、2位轮对摇头运动方程:
(4)
(5)
构架横移运动方程:
(6)
构架摇头运动方程:
(7)
式(2)~式(7)中,轮对受力包括轮轨力和一系悬挂力,转向架受力包括一、二系悬挂力,FT(y)、C2x为非线性项,式(8)给出了轮缘力FT(y)的表达式。
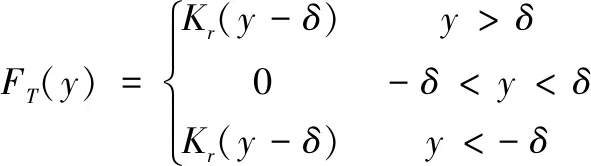
(8)
式(8)中,Kr是轮缘接触横向刚度或者弹性系数;δ为轮轨间隙,从表达式的形式可以看出,在δ间隙内,轮缘力认为是0,只有在超过该间隙时,轮缘才起到回复力的作用。
以上就是建立的转向架横向运动模型,表1是我国CRH某型高速动车组转向架系统参数。
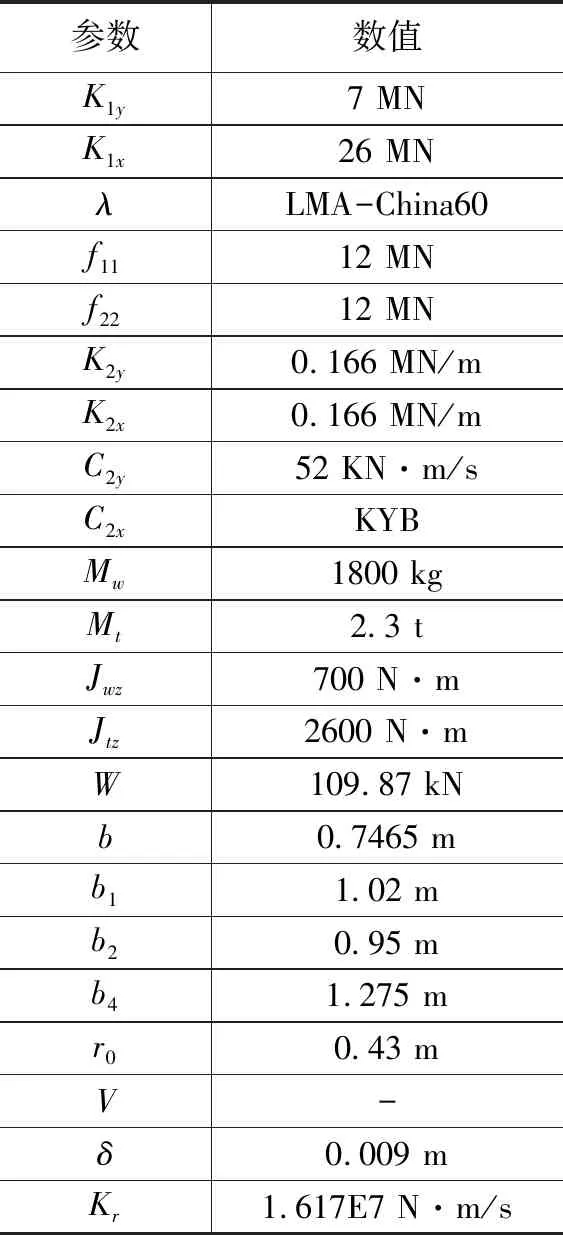
表1 转向架系统参数表
2 道岔不平顺激励模型
我国最常见的道岔类型为可动心轨单开道岔,单开道岔的主线路为直线,侧线路为向左侧或向右侧岔出,其线路数量达到我国九成以上。单开道岔按直向容许通过速度、侧向容许通过速度、道岔功能、轨下基础、技术类型和道岔号码进行分类。通常道岔编码越大,辙叉角越小,导曲线半径越大,侧向允许通过速度越高。可动心轨单开道岔组成结构如图3所示。
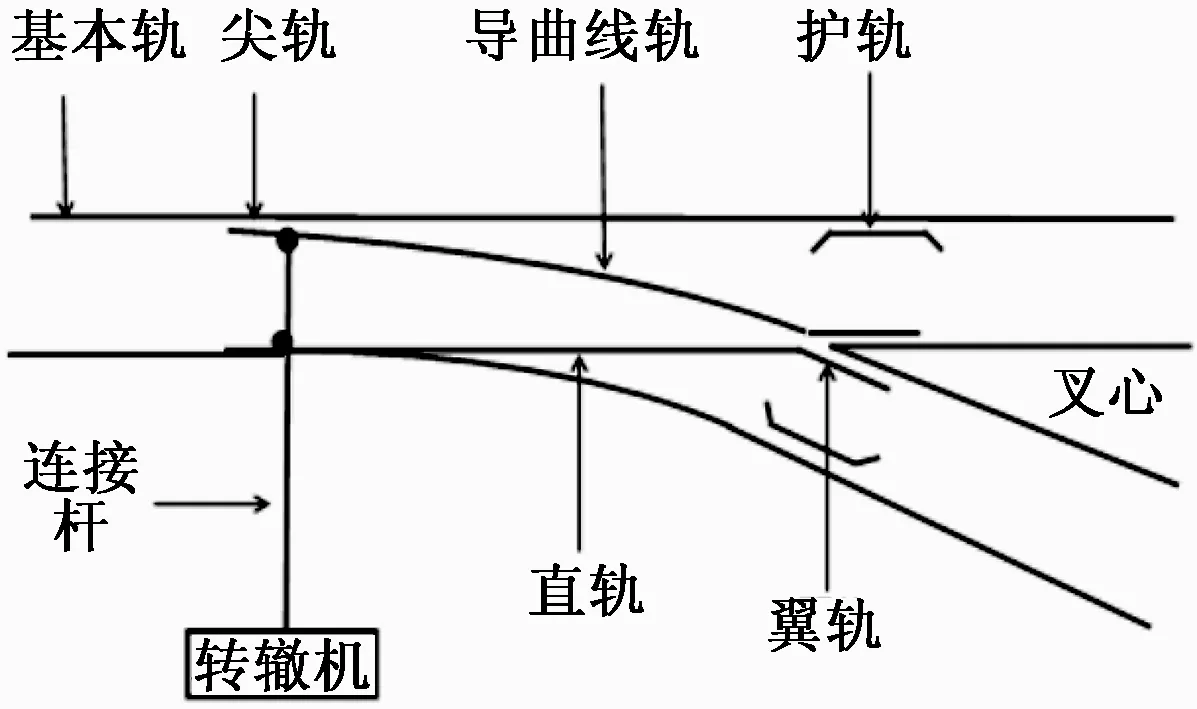
图3 可动心轨单开道岔组成(右开)
本文以客运专线时速350 km/h 18号单开(右开)高速道岔为研究对象,其直向允许通过速度为350 km/h,侧向允许通过速度为80 km/h,道岔轨距为1 435 mm,道岔前长31.729 m,后长37.271 m,道岔全长69 m,导曲线半径1 100 m。
在做好节能管理基础工作的同时,中国海油加大节能技术改造力度,充分依靠节能技改项目来挖掘节能减排潜力。节能项目的实施为实现节能目标提供了重要保障。
道岔结构的特殊性导致高速列车在通过道岔时,会因道岔结构不平顺激励而产生横向与垂向方向的剧烈振动[14]。垂向振动会影响乘客乘坐舒适性,横向振动则引发轮对蛇行运动从而影响高速列车横向运动稳定性。蛇行运动激振源主要来自于水平面横向的不平顺,因此本文建立横向运动模型分析小幅蛇行运动只考虑道岔区间的横向不平顺。
高速道岔结构不平顺主要分布在转辙器及辙叉区域[15],由于引入了轮轨接触几何关系,根据道岔区轮轨接触点位置变化规律,系统不必另外输入不平顺形式,道岔区结构不平顺可以方便的反映在轮轨系统中。本文所用轮轨踏面为LMA-China60,根据文献[16]可以得到LMA型踏面在18号高速道岔区间转辙器部分与辙叉部分的横向不平顺,如图4所示。除上述横向不平顺外,在辙叉部分还存在系统侧向过到岔时所产生的尖轨横向冲击,本文只研究直向过道岔的情况,所以对于尖轨横向冲击不予考虑。
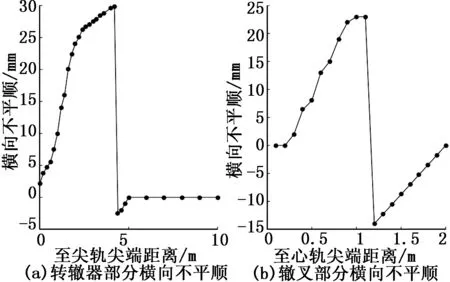
图4 18号道岔区横向不平顺
高速道岔中除了自身结构造成的不平顺以外,道岔区间也同样存在一般轨道线路上的三种主要不平顺:由轨道几何尺寸误差引起的轨道几何不平顺;由轮轨接触面的不均匀磨耗、擦伤等伤损引起的轮轨接触面不平顺;由轨枕失效、道床板结等引起的轮轨动力不平顺。由于本文研究主要针对道岔的结构不平顺,所以暂不考虑区间轨道上的其它不平顺的影响,并假定道岔区间内只存在道岔结构不平顺(实际线路中这种情况是不存在的)。
3 振动模型求解
结合式(2)~(7),可以得到该非线性动力学系统的振动矩阵方程。

(9)
式中,[M]、[C]、[K]分别为系统的质量、阻尼、刚度矩阵;{P}为系统的广义荷载矢量;{X}为系统的广义位移矢量。系统每前进一步及每一次迭代中,均需要重新组建、求解振动方程。这是一个大型复杂非线性动力学微分方程组。由于车辆系统动力学中包括了多种复杂非线性因素,因此,在此类问题的求解上只能采用直接数值积分法。
本文选择的方法为翟婉明院士提出的新型快速数值积分方法—翟方法(新型快速显式积分法)[17]。其基本原理是:利用前两步的位移、速度、加速度量预测下一步的位移、速度量,再根据系统运动方程求解下一步的角速度量,如此循环递推。其积分格式为:

(10)
式中,Δt为时间积分步长;下标n、n-1、n+1分别代表当前步t=nΔt时刻、上一步t=(n-1)Δt时刻、下一步t=(n+1)Δt时刻;φ、ψ是控制积分方法特性的独立参数。
翟方法的条件稳定范围是比较宽的,且显式的翟方法与Newmark-β隐式积分法具有同阶精度[18],因此,翟方法在计算过程简捷、计算效率高的同时又能保证积分精度与稳定性。
4 转向架小幅蛇行过道岔分析
根据以上转向架、道岔不平顺激励模型的建立及方法分析,在如前所述假设条件下,利用MATLAB编制计算机程序进行仿真,分别对转向架在直向过道岔时有无初始小幅蛇行运动的工况进行计算。
4.1 转向架各轮对横移量分析
图5中为速度340 km/h下转向架无初始小幅蛇行运动过岔时一、二位轮对横移量,图中横坐标为运行时间,t0为转向架将要进道岔的时刻,纵坐标为轮对在轨道线路上运行时的计算横移量,取向右横向移动为正方向,向左为负。
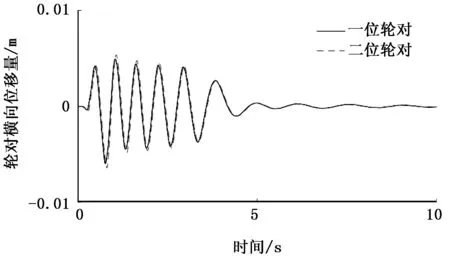
图5 转向架340 km/h直向过岔各轮对横移量
由计算结果可以看出,同一转向架过岔时各轮对横移量相差不大,二位轮对横移量较一位轮对略大,但一、二位轮对横移变化规律基本相同。这是因为机车车辆转向架轴距、轮对相对固定,在运行过程中,总是转向架的前轮对先接触到道岔区线路的结构不平顺,而前轮对受到不平顺激扰引起横向振动又对后轮对有一个同向的影响。因此,在转向架前后轮对具有同向的横移趋势时前轮对的横移量略小于后轮对,而前后轮对具有反向的横移运动趋势时,前轮对横移量略大于后轮对。总体来说前后轮对横移量相差不多,其横移变化趋势基本相同,所以在下面的分析中只考虑转向架一位轮对的横移量变化。
4.2 平稳状态下直向过道岔分析
在正常平稳状态下直向过道岔时,计算转向架在不同速度下直向过道岔的一位轮对横移量变化如图6所示。
从计算结果可知,在运行速度未超过395 km/h时,轮对会受到道岔结构不平顺的激扰而产生蛇行运动,较短时间过后转向架驶出道岔来到区间线路上,由于没有了其它激扰源且轮轨之间存在蠕滑作用以及一、二悬挂的阻尼作用,直向过道岔产生的蛇行运动将会在一定时间内收敛,最终转向架运行趋于稳定,只是直向过道岔时速度越大,蛇行运动横向幅值也越大,收敛时间也越长。行驶速度为396 km/h时,转向架直向过道岔后轮对蛇行运动并不收敛出现了发散,此时转向架处于蛇行失稳(大幅蛇行)状态,由此可知,本文转向架横向运动模型平稳状态下直向通过18号道岔的最高安全速度为395 km/h。这与本文所用客运专线18号单开高速道岔实测所允许直向通过速度为350 km/h不符,这是因为本文并未建立完整的车辆动力学模型进行分析,其次为了便于分析对于道岔激励模型做了一些简化,在道岔区间内也没考虑其它区间线路上的三种主要不平顺,所以计算出的速度有一定的余量并且偏大。
4.3 小幅蛇行状态下直向过道岔分析
通过改变初始条件使得转向架模型在过道岔之前处于小幅蛇行状态,计算得出了在小幅蛇行状态下转向架直向通过道岔的一位轮对蛇行运动变化,如图7~8所示。图中t0是转向架前轮对(一位轮对)刚接触到道岔区间的时刻,t0时刻的轮对横移量为转向架刚进道岔时小幅蛇行运动振幅。
从图7中的计算结果可知,当t0时刻的小幅蛇行振动幅值为1~2 mm时,转向架过道岔的最高安全时速分别是395 km/h和392 km/h,与4.2节中该转向架模型正常过道岔最高时速基本一致(变化范围在1 m/s以内,因误差等因素可忽略);图8中当其振动幅值在3~5 mm时,转向架过道岔分别在379 km/h、355 km/h、321 km/h时就发生了蛇行失稳的情况,这三种工况下转向架过道岔的最高安全时速变为378 km/h、354 km/h和320 km/h,该安全运行速度均低于该模型正常状态下直向过道岔的允许速度,且振动幅值越大,过道岔的允许速度也越低;在小幅蛇行状态下直向通过道岔,其小幅蛇行运动演变为蛇行失稳后的振荡幅值也比平稳状态下过道岔的幅值要大。
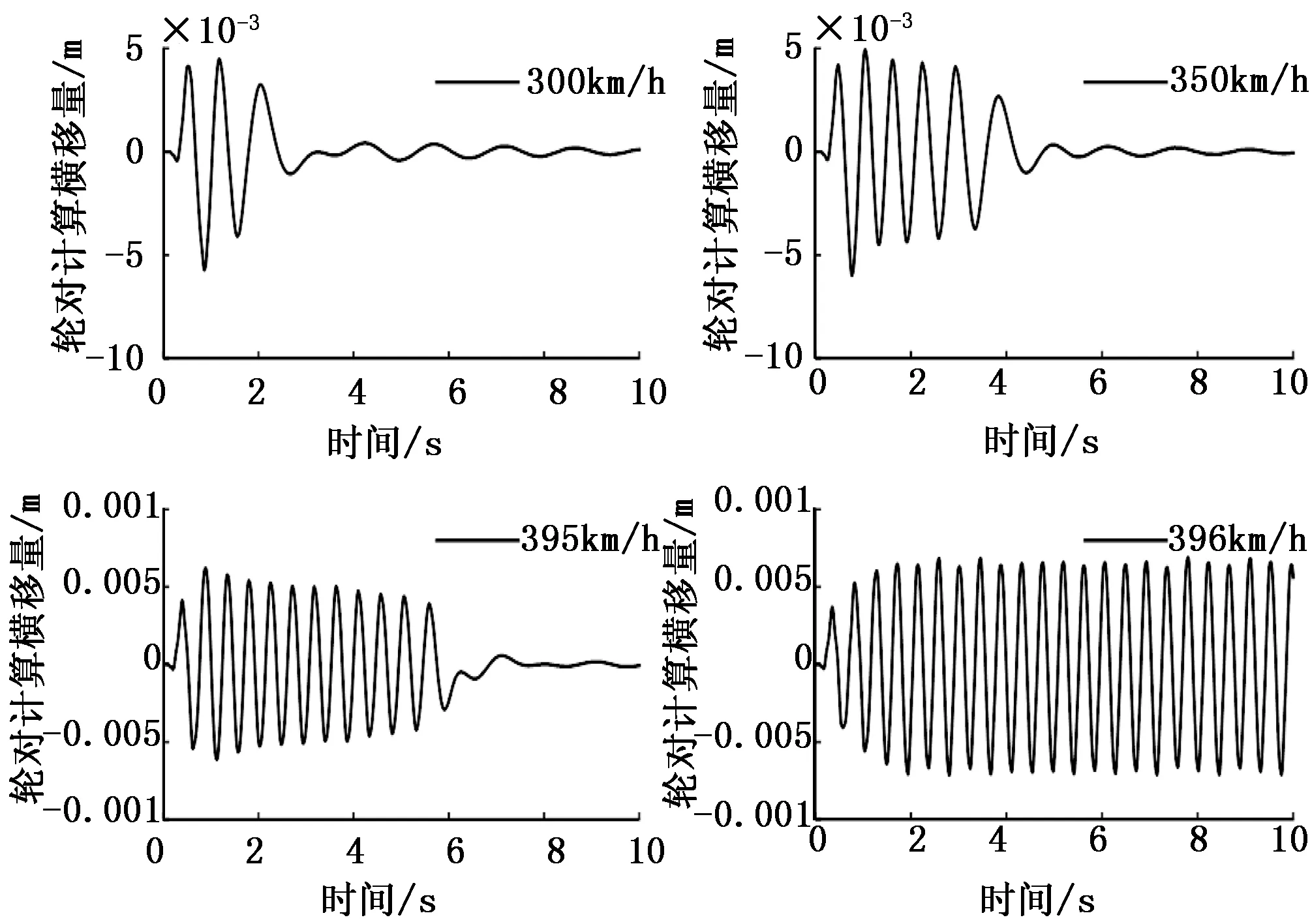
图6 不同速度下轮对过道岔横移量
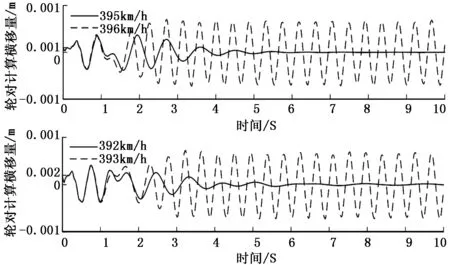
图7 小幅状态下一位轮对横移量时程图
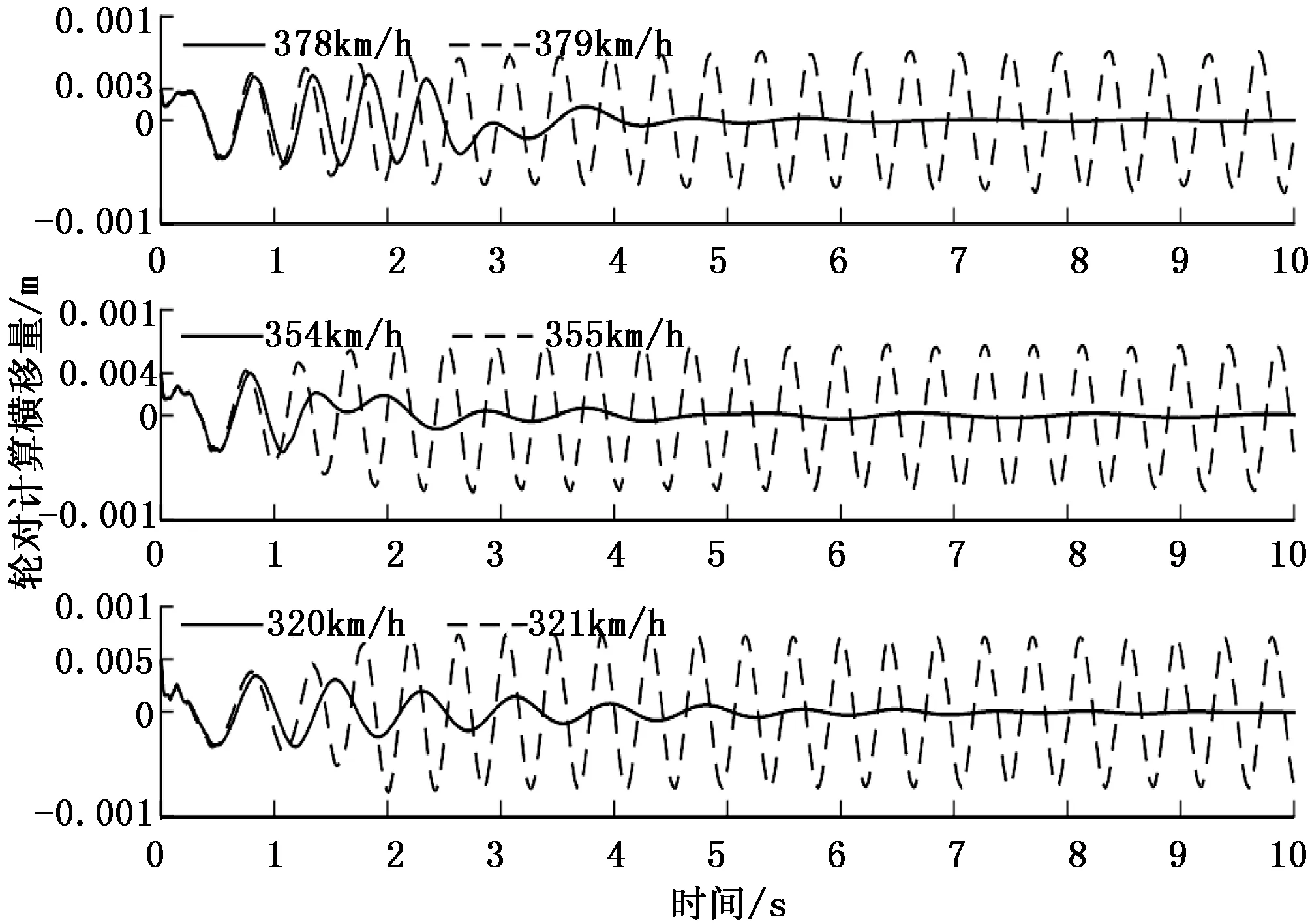
图8 小幅状态下一位轮对横移量时程图
5 结语
本文利用我国CRH某型高速动车组转向架系统参数和18号高速道岔结构参数建立高速转向架横向运动模型和道岔不平顺激励模型,计算并分析了平稳状态和小幅蛇行状态下转向架直向过道岔时轮对的横移量变化,得到如下结论。
1)不同于侧向过道岔时由于道岔结构特性不可避免横向冲击而产生蛇行运动,高速转向架在平稳状态下直向通过道岔也会发生振动幅值较大的蛇行运动。在速度较高的时候,其蛇行运动幅值也较大。在道岔允许通过速度以内,速度越大,直向过道岔产生的蛇行运动收敛时间也越长。
2)小幅蛇行状态下直向过道岔与刚进道岔时的小幅蛇行振动幅值有关。振动幅值较小(1~2 mm)时,与平稳状态下基本相同,速度未超过396 km/h时蛇行运动皆能收敛至平稳状态,但小幅状态下过道岔时的蛇行振动峰值略大于平稳状态下。振动幅值较大(3~5 mm)时,直向过道岔时的安全速度均低于395 km/h,且振动幅值越大,过道岔安全速度越低,小幅蛇行运动发散后蛇行失稳的振幅也越大。
3)本文所建立的转向架横向运动模型和道岔不平顺模型对比于整车的车辆—道岔耦合模型而言比较简单,且做了较多的简化和假设,在计算结果上并没有整车模型准确以及符合实际工况,但本文模型也考虑了轮轨接触关系以及一二系悬挂作用,计算和分析也更简单,本文所揭示的转向架运动规律与整车基本一致,只是在数值结果上有一定差异。
猜你喜欢
计算机测量与控制(2023年8期)2023-08-30 03:35:38
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
中国工程机械学报(2019年4期)2019-08-06 11:21:08
铁道机车车辆(2019年3期)2019-07-29 09:47:46
汽车与安全(2019年4期)2019-06-20 07:40:13
汽车与安全(2019年2期)2019-06-11 09:23:00
振动工程学报(2019年2期)2019-05-13 01:45:58
汽车与安全(2017年8期)2017-09-04 03:41:14
汽车与安全(2017年6期)2017-07-25 09:56:54