
点云与光谱影像产品在森林资源普查中的应用
2019-09-24 07:03王义张昊琼赵守杰
资源导刊(信息化测绘) 2019年8期
王义 张昊琼 赵守杰
(1.河南省金地遥感测绘技术有限公司,河南 郑州 450003;2.河南省遥感测绘院,河南 郑州 450003)
1 引言
近年来,光学遥感利用卫星影像与航空照片补充替代传统的森林资源普查,获取大区域森林生态、环境、气候信息和生长因子。虽然光学遥感技术无法获取林木三维结构参数,但激光雷达遥感技术可有效穿透森林,获取三维结构参数。传统的森林普查信息采集困难,无法获取林木结构信息及空间位置,测量结果真实性差。而通过高精度激光雷达扫描,可提取点云数据中的森林参数和统计变量,包括林木高度、反射强度、郁闭度、密度大小、叶面积指数等。根据参数反演森林蓄积量、覆盖率和间隙情况,分辨树木年龄、种类、数量,依据森林地面DEM,实现森林单木分割,自动提取林木结构参数。本文通过介绍机载LiDAR 与光学遥感技术,分析点云及影像数据在森林资源普查中的应用,旨在提供一种快速、高效的作业方法。
2 激光点云在森林普查中的应用
2.1 点云数据获取
激光雷达的主要工作原理为发射激光束对目标物的距离和角度进行量测。根据激光在空气中的传播速度,记录激光脉冲从发射到到达目标反射物的时间,计算出激光器到反射物的距离,同时利用角度编码器记录每一束激光脉冲的角度。激光雷达可以瞬间发射多束激光脉冲,借此可精确计算出树木的高度、位置、树冠、树木边界等,构建真实三维模型,探测地面真实地形。机载LiDAR 获取和林木处理流程如图1 所示。
2.2 分块抽稀
利用机载LiDAR 数据获取样地中的点云数据,对数据进行处理分析,将飞行数据进行分块处理。由于单木提取需要大量点云数据,高密度的点云不一定能够提高单木提取的精度。因此,需要对数据进行抽稀处理。根据点云数据可直接量测树高(如图2 所示)。
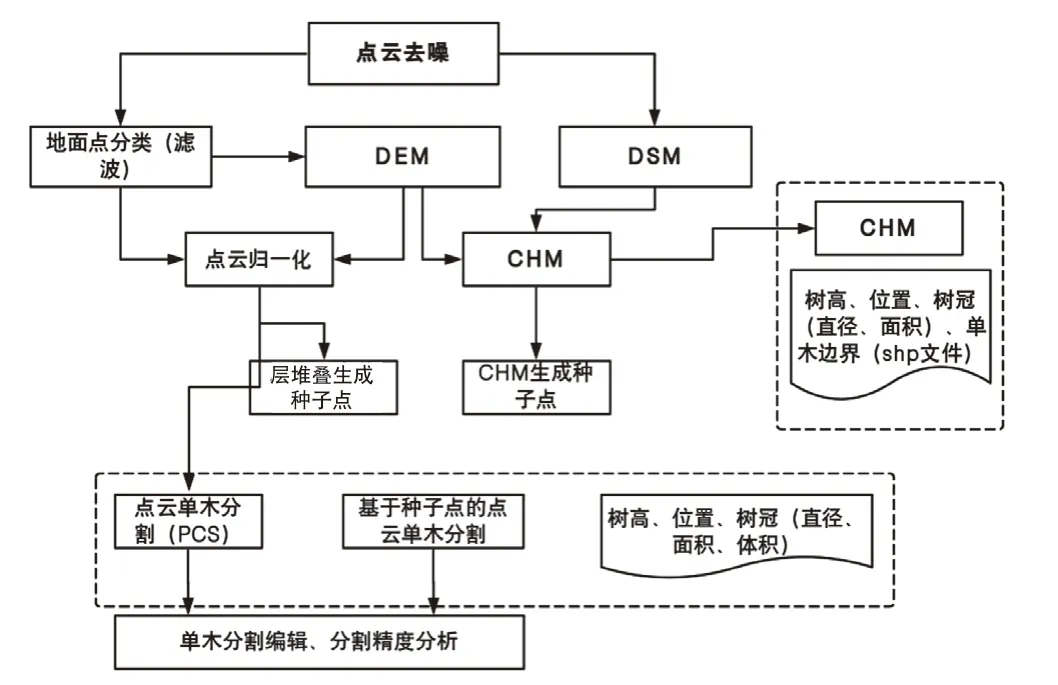
图1 Lidar点云获取处理流程
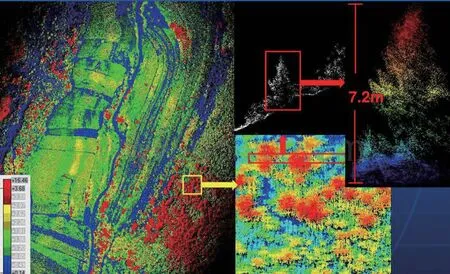
图2 点云数据采集成果
2.3 粗差识别剔除与点云滤波
激光雷达点云一般存在粗差,对后续的点云处理和信息提取有负面影响,需要进行粗差的识别和剔除。地面点粗差剔除一般采用高程插值,由于点云数据量大,可进行分批处理。对LAS文件采用相同的滤波参数,识别地面点数据后生成测区的数字高程模型。本文利用商业化点云处理软件Terrasolid 插件功能完成。
3 光谱影像在森林资源普查中的应用
3.1 多光谱影像对林地与非林地的判读
多光谱影像可判读物种信息,选取不同目标对象获取相应光谱,植被光谱在680nm 以后分反射率会提高,非植被的红边效应与真实植被的红边效应有很大差别。对可见近红外波段的数据进行处理,利用归一化植被指数和红边归一化植被指数区分识别目标物。
RGB、CIR 和NIR 多光谱影像数据如图3 所示。标准假彩色合成(CIR)波段影像的获取主要是通过RGB影像和NIR 影像数据相互融合,采取近红外波段与RGB 影像中的红波段和绿波段,主要用于植被、湿地监测,也可区分部分植被的种类。通过CIR 影像可以区分针叶林、阔叶林、草地,以及建筑、耕地、水系等。CIR 影像对林地和非林地的判读如图4 所示。

图3 RGB、CIR和NIR多光谱影像数据
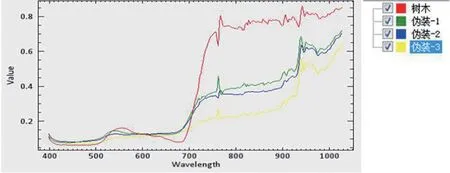
图4 CIR影像对林地和非林地的判读
3.2 高光谱影像对树种的判读和植被类型的区分
数字遥感影像只能根据颜色简单地将树种区分为针叶林和阔叶林,光学影像受光照影响,相同树种可能显示出不同光谱信息。然而,高光谱影像处理后,根据高光谱分辨率和大量光谱波段获取不同地类的光谱曲线,建立树种光谱数据库,可提高识别和分类精度,清晰判读出建筑物、林地、耕地、水系等的特征,辨别各种物体的细微光谱差异,然后根据不同介质的波段反射对相同地类的种类进行区分,如杨树、樟树、松树等植被种类(如图5 所示)。
3.3 全色彩影像数据的应用
通过正射影像,根据针叶林及阔叶林的树冠和树干进行数量统计。根据影像判读,对变色树、异常林地进行精确定位,采集有效的影像资料,辅助判断森林健康等级,还可清晰看出树木病虫害及受损林地范围、面积、程度。影像病虫害解译如图6 所示。
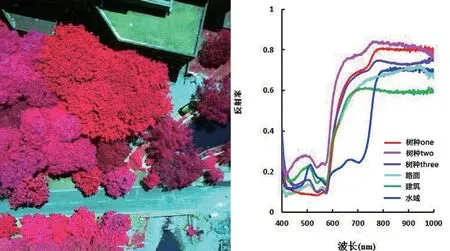
图5 高光谱曲线对林木种类的判读

图6 病虫害解译
通过全色彩影像可以清晰看到森林中的乱砍滥伐现象,精准获取盗伐滥伐的面积、株树,为执法人员提供有力证据,便于执法人员前往实地执法。全色彩影像及实地核查结果如图7 所示。

图7 全色彩影像及实地核查
4 点云与光谱影像在植被信息统计中的应用
通过机载LiDAR 及多光谱相机获取的成果数据对比,分析出森林经营区划和林地小斑区划界限,各类面积及权属、森林类别等管理属性,非林地上森林、人工造林、未成林的面积及其权属、森林类别等管理属性,林木资源株树、蓄积,自然地理环境和生态环境,调查森林经营条件、措施与成效。点云数据及多光谱影像数据同步获取的成果如图8 所示。
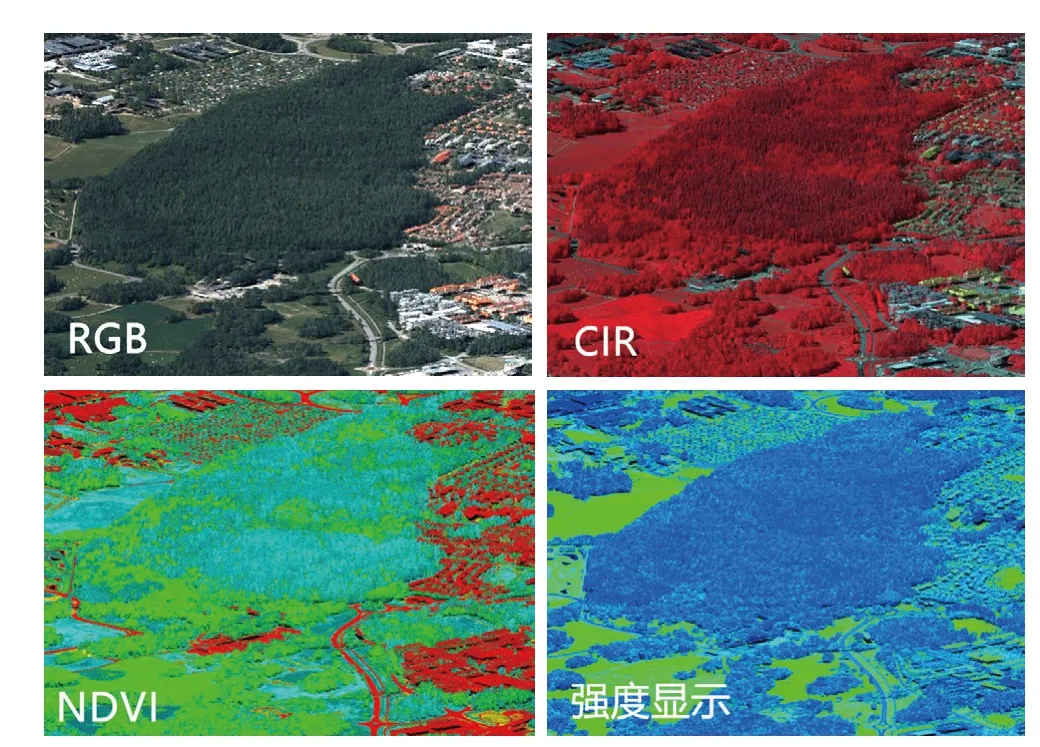
图8 多波段影像与点云数据
4.1 点云着色及纹理映射
高精度、高密度、精准表达三维地物是点云数据的特点,但是缺乏色彩信息无法对林地进行准确判断。通过多波段影像对点云数据进行色彩纹理映射,点云数据和影像数据转化在同一坐标系下,即赋予点云真实色值(RGB),实现真色彩点云可视化三维模型。点云着色有两种:一种是相机标定;一种是通过点云和影像,利用反射率图像和强度信息进行纹理匹配。相机标定直接利用线性变换将纹理图像与点云进行匹配,具体方法为:同名点选择、根据DLT 建立点云及影像像素的几何对应关系,求出点云中所有点与影像中的像素对应值,得到具有颜色真实感的三维模型[1]。着色后的点云主要应用于去噪后点云分类检查使用,如高压线、通信塔等非植被数据分类是否准确。
点云数据着色后,由于点云数据具有离散性,并非结构化数据,一般情况下需要对点云数据构建TIN三角网,然后通过纹理映射,使其富有质感,更接近真实场景。LiDAR360 中点云工具插件中的纹理映射功能可以实现。点云数据根据RGB 颜色显示后,可得到接近影像数据的点云数据(如图9 所示)。

图9 纹理映射后的点云数据
4.2 单木分割法
单木分割法分归一化点云单木分割和CHM 单木分割两种。点云单木分割是基于地面点云归一化算法,点云数据经过地面点分类后获取DEM,去除地表模型起伏对植被点云高程的影响。其原理是将植被点云Z值减去至贴近地面高程值。点云单木分割法是将树木单株分别显示得出。PCS 算法基本原理如图10 所示。
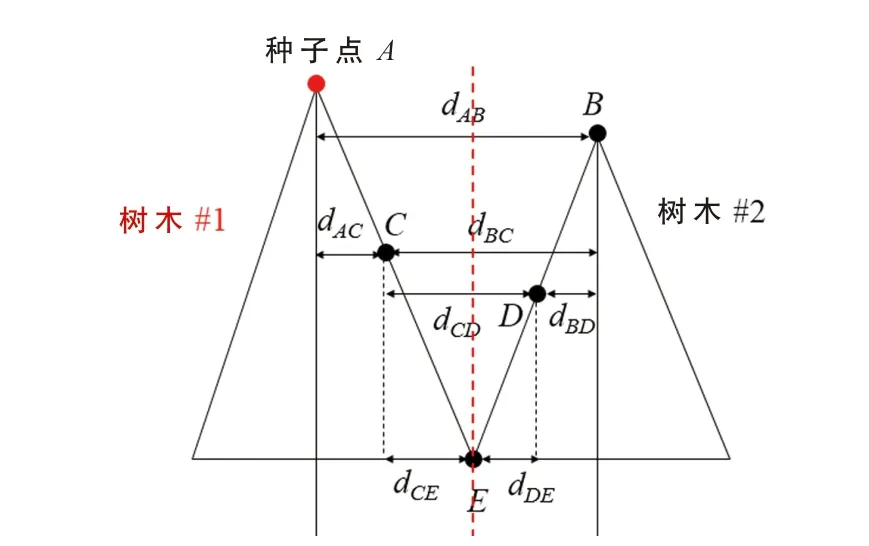
图10 PCS算法基本原理图
种子点A 为最高点即树高点,是待分割的点,dAB、dAC、dBC、dBD、dCE、dDE分别表示两点间的距离。PCS 算法原理可以简单描述为当目标点(B、C、D、E)到已分出树A 中所有点的二维投影最小值大于设定阈值d(2D 欧式距离)时,则认为目标点属于另一棵树B;如果阈值小于d 且到目标点的距离小于到B 的距离,则认为目标点属于树A,否则属于树B[2]。
分水岭分割算法为CHM 分割,基于CHM 栅格的单木分割就是一种基于栅格图像的分割方法,所以基于CHM 的单木分割方法可以视作针对灰度图像的处理技术,其中典型算法有注水算法、分水岭分割算法等,亮度高点为山峰,阴暗面为山谷。假如用水填充并建立屏障,禁止不同山谷的填充水汇合,屏障即为分割成果。相较于点云分割,分水岭分割方法速度快,且对图像灰度的细微变化更加敏感,在目标物体周围生成封闭的轮廓线更加准确清晰,从而获取单棵林木的位置、冠幅直径、冠幅面积及高度等信息[3](如图11 所示)。
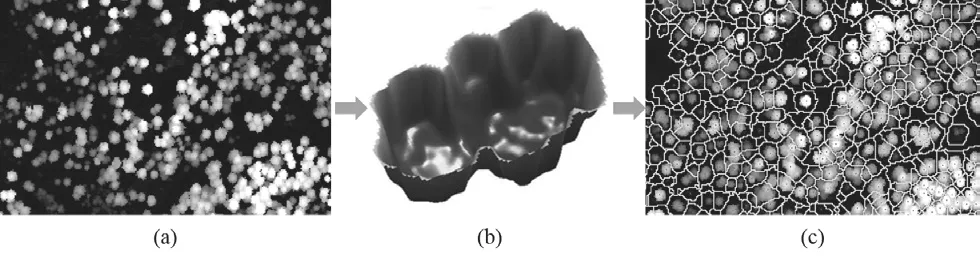
图11 (a) CHM (b)分割算法 (c)分割成果
4.3 根据林木ID 提取点云
基于分割后的点云数据,生成种子点及单棵树位置,然后对点云进行分割,同时检查错分、漏分等情况。当单木分割精度较差时,可通过纹理映射后的点云数据人工增加和删除种子点,增加种子点应在剖面窗口进行,尽可能选择树顶。本文主要利用商业软件LiDAR360 软件实现(如图12 所示)。
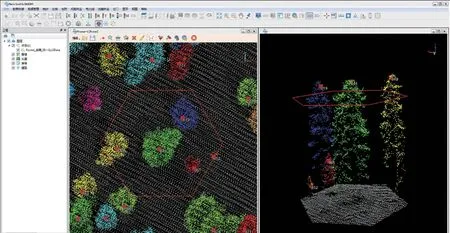
图12 种子点数据的生成及剖析
整理编辑准确的种子文件后,对单木信息进行提取,比如坐标、树高、冠幅直径、覆盖面积等信息(如图13 所示)。
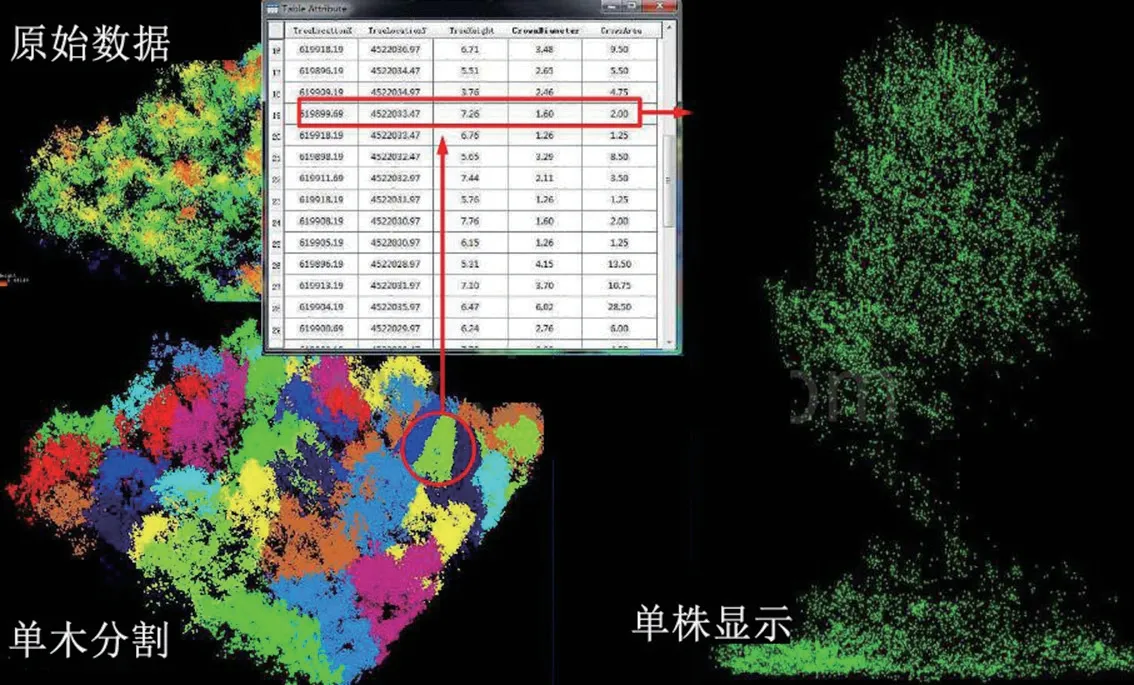
图13 单木信息属性提取
4.4 根据多波段影像数据解译树种信息
仅依靠点云数据无法对树种进行解译分析,可利用ArcGIS 软件,根据树种解译标志,基于真色彩影像和近红外影像进行树种解译,极大减少外业调查的工作量。真色彩影像图像平淡、色调灰暗、颜色不饱和,通常运用于林地和非林地的辨认,以及针叶林、阔叶林等明显色彩差异的区分。近红外影像反射率高、吸收率低,可反映植被颜色及纹理信息,辅助对树种进行辨认。同时,可以根据树冠的形状、大小、纹理、分布规律及生活习性等特征判读树种。在树种判读时,对真色彩影像无法判读相似颜色,或容易造成判读错误的区域,可以参照近红外影像的纹理特征加以区分[4]。
4.5 森林生物量和储积量估测
由于森林普查面积广泛,图斑种类繁杂,在获取大面积点云数据时,点云密度无法精确计算位置、树高和树冠直径、面积、体积等,因此需要在影像图斑中采集不同种类的样地实地测量,统计不同图斑中实际的林储量和林木参数,为后期大范围计算提供依据。 树木种类、数量、地域、生长情况等都与树木生长的方程参数有关,但较难计算。外业人员需实地采样获取树种的生长特征和详细参数,制作参数计算公式,利用树高、树木数量、树木胸径等数据库建立回归模型,用计回归方法进行估测,从而获取森林储积量。
获取林木详细参数后,与实际点云测量的结果相对比,对样地范围内的树种进行区分、编绘、统计、计算参数,获得森林储积成果,林木材积算法如图14所示。根据归一化点云数据,提取一系列森林参数,比如郁闭度、间隙率、叶面积指数等信息。
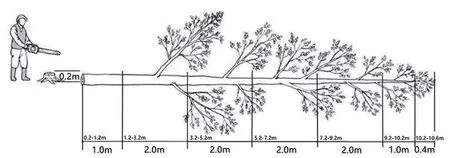
图14 林木材积算法示意图
5 结语
本文利用机载LiDAR 和多光谱相机,获取点云数据和多波段影像数据,并利用单木分割方法精确分割出单个树木点云,获取单木位置、冠幅直径、覆盖面积等信息,有效估算森林生物量、郁闭度、叶面积指数。光谱影像具有波段多、光谱分辨率高等特点,利用光谱影像叠加分析,可以进行树种分类、病虫害分析等,确保调查准确性和地类识别精度,有效减轻调查人员的劳动强度。点云和光谱数据能够辅助完成森林资源年度出数、一类清查和二类调查等工作,可提高调查效率,破解造林核查、荒漠化监察、林业执法、灾害评估等方面的技术难题,为森林普查提供技术支撑。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
黑龙江大学自然科学学报(2022年1期)2022-03-29
园林科技(2021年2期)2021-12-03
大自然探索(2021年7期)2021-09-26
空间科学学报(2021年1期)2021-05-22
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
农民致富之友(2018年12期)2018-06-29
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
